







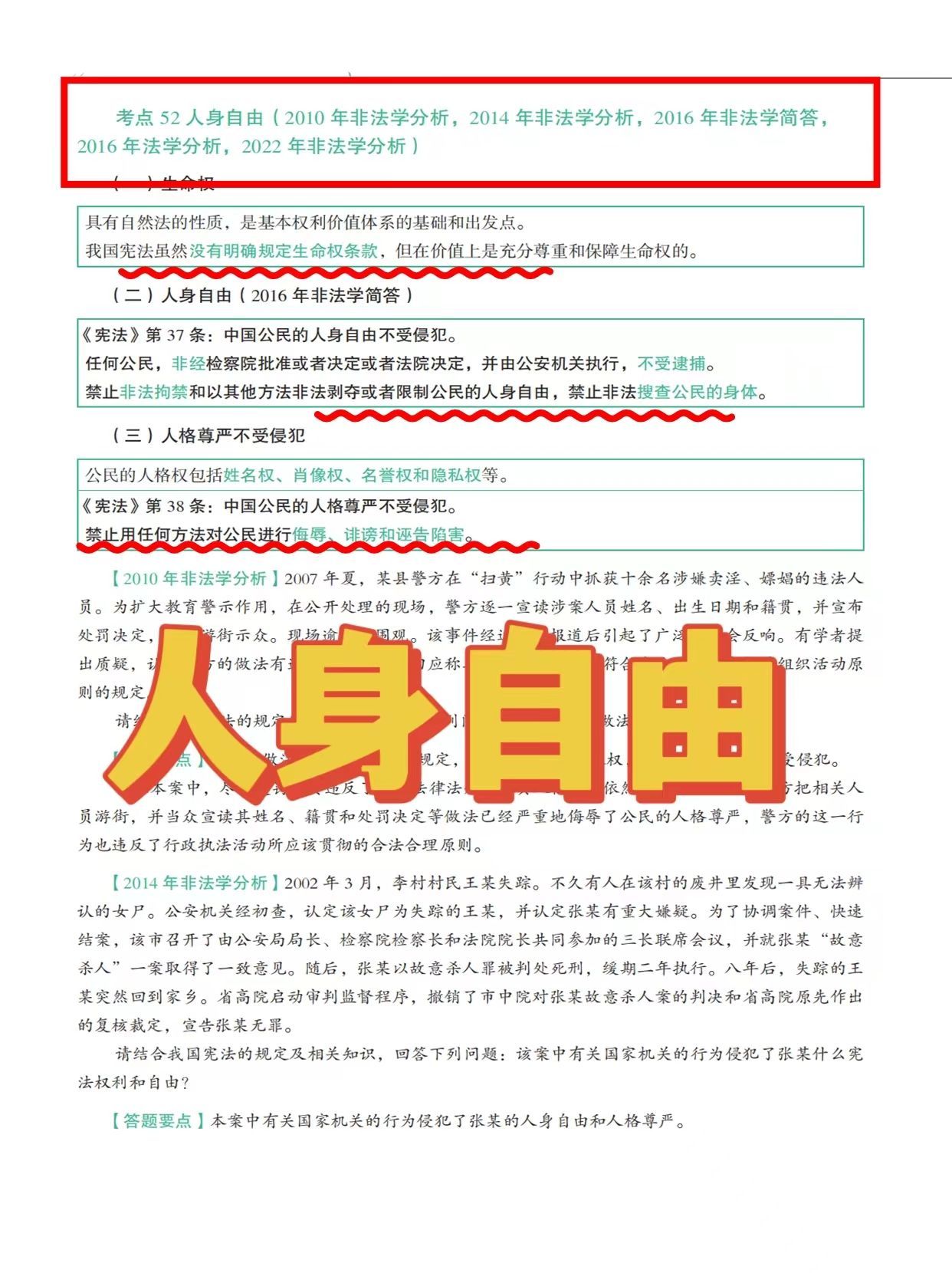
 🏃♂️ 人身自由,简单来说,就是公民的身体不受非法侵犯,享有不受非法限制、拘束、逮捕、拘禁和搜查的自由。它是我们作为人的基本尊严和价值的体现,也是实现其他权利的基础。
🏃♂️ 人身自由,简单来说,就是公民的身体不受非法侵犯,享有不受非法限制、拘束、逮捕、拘禁和搜查的自由。它是我们作为人的基本尊严和价值的体现,也是实现其他权利的基础。
📝 在备考法律硕士联考时,关于人身自由,你需要掌握以下几个关键点:
人身自由的含义:深入了解人身自由的基本定义和内涵,明确它在公民权利体系中的核心地位。
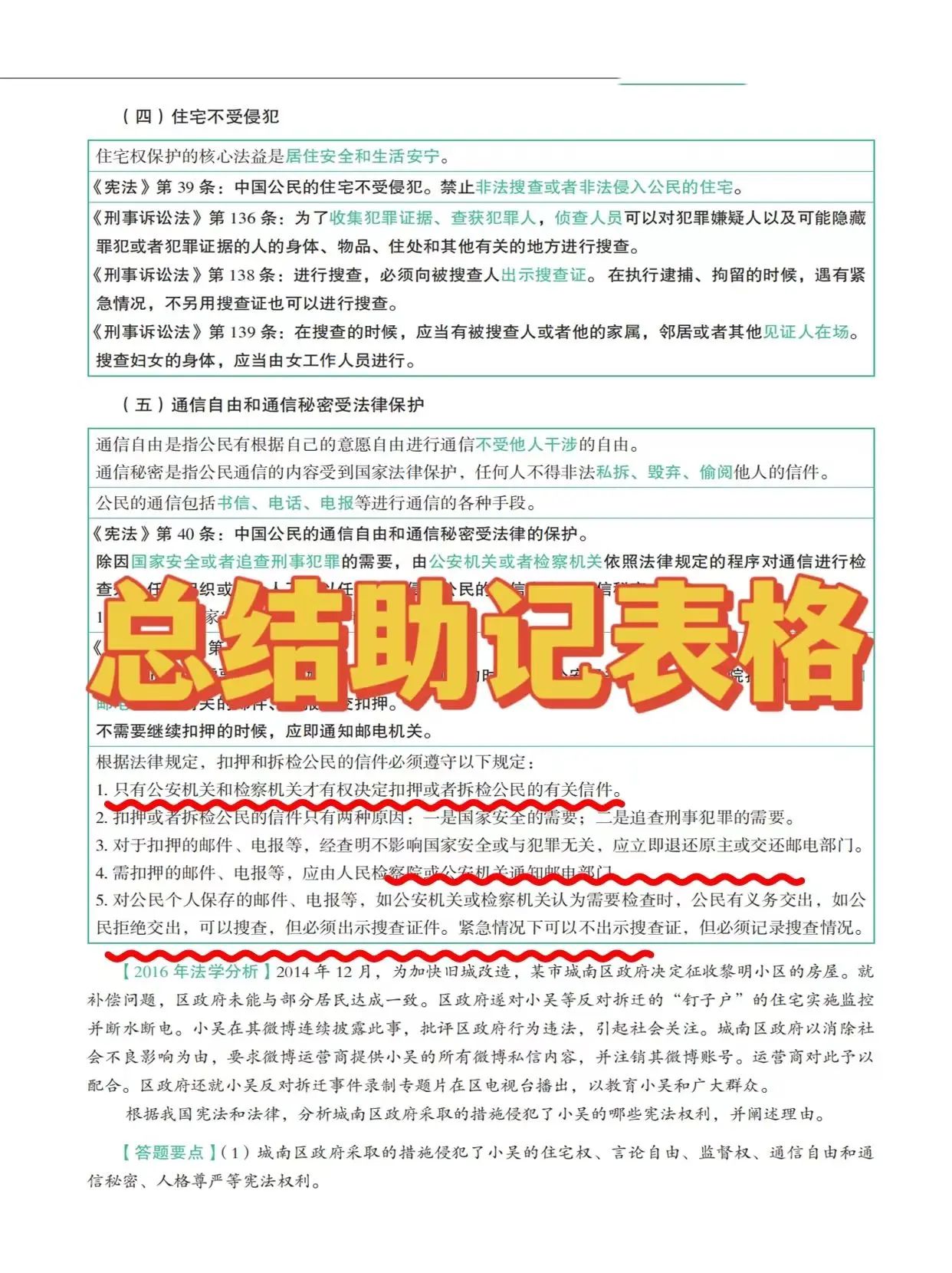
人身自由的内容:人身自由包括身体自由、精神自由以及与人身自由密切相关的住宅不受侵犯、通信自由和通信秘密受法律保护等。你需要清楚每一项自由的具体含义和重要性。
人身自由的行使与保障:了解公民如何依法行使人身自由,以及当人身自由受到侵害时,有哪些法律途径可以进行保护和救济,比如通过刑事诉讼来维护自己的合法权益。
人身自由与公共利益的平衡:虽然人身自由是公民的基本权利,但在特定情况下,为了维护公共利益或社会秩序,人身自由也可能会受到一定的限制。你需要了解这些限制的条件和法律依据。
人身自由的国际保护:除了国内法律的保护,人身自由还受到国际法的保护。了解相关国际公约和条约对人身自由的规定,有助于更全面地理解这一权利的重要性。
💡 备考小贴士:
- 深入研读宪法和相关法律法规,了解人身自由的法律依据和具体规定。
- 关注现实生活中的人身自由案例,了解这一权利在实践中的应用和保护情况。
- 通过做题练习,检验自己对人身自由的掌握程度,查漏补缺。
💪 最后,人身自由是我们每个公民最基本、最重要的权利之一,它关乎我们的尊严、价值和自由。在备考法律硕士联考时,一定要深入理解人身自由的内涵和意义,为将来的法律职业生涯打下坚实的基础!#2025法律硕士考研[话题]# #法律硕士[话题]# #觉晓法硕[话题]# #法律硕士联考[话题]# #法学[话题]# #非法学[话题]# #法律硕士非法学[话题]# #宪法学[话题]#















 544
544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









