







在图片处理中,霍夫变换主要是用来检测图片中的几何形状,包括直线、圆、椭圆等。
在skimage中,霍夫变换是放在tranform模块内,本篇主要讲解霍夫线变换。
对于平面中的一条直线,在笛卡尔坐标系中,可用y=mx+b来表示,其中m为斜率,b为截距。但是如果直线是一条垂直线,则m为无穷大,所有通常我们在另一坐标系中表示直线,即极坐标系下的r=xcos(theta)+ysin(theta)。即可用(r,theta)来表示一条直线。其中r为该直线到原点的距离,theta为该直线的垂线与x轴的夹角。如下图所示。
对于一个给定的点(x0,y0), 我们在极坐标下绘出所有通过它的直线(r,theta),将得到一条正弦曲线。如果将图片中的所有非0点的正弦曲线都绘制出来,则会存在一些交点。所有经过这个交点的正弦曲线,说明都拥有同样的(r,theta), 意味着这些点在一条直线上。
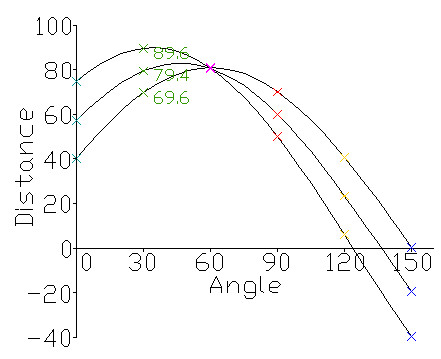
发上图所示,三个点(对应图中的三条正弦曲线)在一条直线上,因为这三个曲线交于一点,具有相同的(r, theta)。霍夫线变换就是利用这种方法来寻找图中的直线。
函数:skimage.transform.hough_line(img)
返回三个值:
h: 霍夫变换累积器
theta: 点与x轴的夹角集合,一般为0-179度
distance: 点到原点的距离,即上面的所说的r.
例:

import skimage.transform as st
import numpy as np
import matplotlib.pyplot as plt
# 构建测试图片
image = np.zeros((100, 100)) #背景图
idx = np.arange(25, 75) #25-74序列
image[idx[::-1], idx] = 255 # 线条\
image[idx, idx] = 255 # 线条/
# hough线变换
h, theta, d = st.hough_line(image)
#生成一个一行两列的窗口(可显示两张图片).
fig, (ax0, ax1) = plt.subplots(1, 2, figsize=(8, 6))
plt.tight_layout()
#显示原始图片
ax0.imshow(image, plt.cm.gray)
ax0.set_title('Input image')
ax0.set_axis_off()
#显示hough变换所得数据
ax1.imshow(np.log(1 + h))
ax1.set_title('Hough transform')
ax1.set_xlabel('Angles (degrees)')
ax1.set_ylabel('Distance (pixels)')
ax1.axis('image')
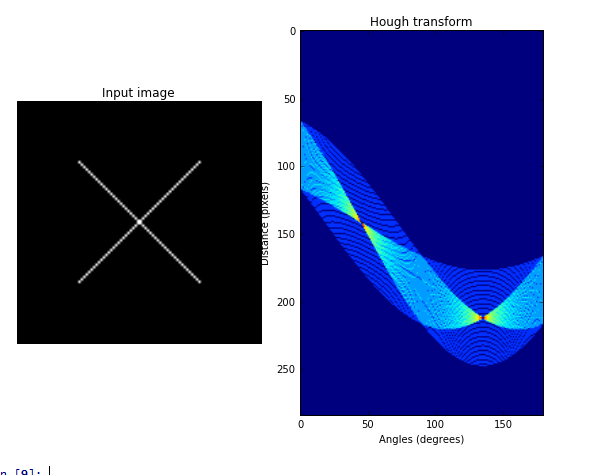
从右边那张图可以看出,有两个交点,说明原图像中有两条直线。
如果我们要把图中的两条直线绘制出来,则需要用到另外一个函数:
skimage.transform.hough_line_peaks(hspace, angles, dists)
用这个函数可以取出峰值点,即交点,也即原图中的直线。
返回的参数与输入的参数一样。我们修改一下上边的程序,在原图中将两直线绘制出来。
import skimage.transform as st
import numpy as np
import matplotlib.pyplot as plt
# 构建测试图片
image = np.zeros((100, 100)) #背景图
idx = np.arange(25, 75) #25-74序列
image[idx[::-1], idx] = 255 # 线条\
image[idx, idx] = 255 # 线条/
# hough线变换
h, theta, d = st.hough_line(image)
#生成一个一行三列的窗口(可显示三张图片).
fig, (ax0, ax1,ax2) = plt.subplots(1, 3, figsize=(8, 6))
plt.tight_layout()
#显示原始图片
ax0.imshow(image, plt.cm.gray)
ax0.set_title('Input image')
ax0.set_axis_off()
#显示hough变换所得数据
ax1.imshow(np.log(1 + h))
ax1.set_title('Hough transform')
ax1.set_xlabel('Angles (degrees)')
ax1.set_ylabel('Distance (pixels)')
ax1.axis('image')
#显示检测出的线条
ax2.imshow(image, plt.cm.gray)
row1, col1 = image.shape
for _, angle, dist in zip(*st.hough_line_peaks(h, theta, d)):
y0 = (dist - 0 * np.cos(angle)) / np.sin(angle)
y1 = (dist - col1 * np.cos(angle)) / np.sin(angle)
ax2.plot((0, col1), (y0, y1), '-r')
ax2.axis((0, col1, row1, 0))
ax2.set_title('Detected lines')
ax2.set_axis_off()
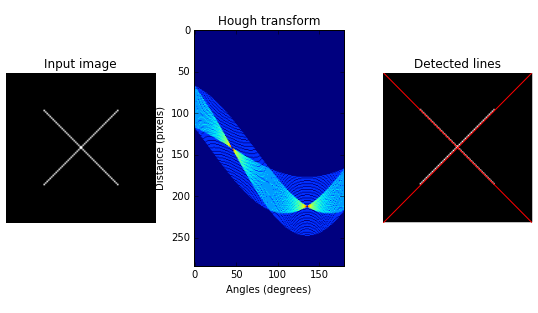
注意,绘制线条的时候,要从极坐标转换为笛卡尔坐标,公式为:
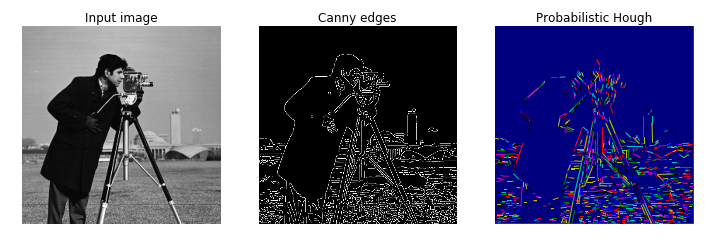
skimage还提供了另外一个检测直线的霍夫变换函数,概率霍夫线变换:
skimage.transform.probabilistic_hough_line(img, threshold=10, line_length=5,line_gap=3)
参数:
img: 待检测的图像。
threshold: 阈值,可先项,默认为10
line_length: 检测的最短线条长度,默认为50
line_gap: 线条间的最大间隙。增大这个值可以合并破碎的线条。默认为10
返回:
lines: 线条列表, 格式如((x0, y0), (x1, y0)),标明开始点和结束点。
下面,我们用canny算子提取边缘,然后检测哪些边缘是直线?
import skimage.transform as st
import matplotlib.pyplot as plt
from skimage import data,feature
#使用Probabilistic Hough Transform.
image = data.camera()
edges = feature.canny(image, sigma=2, low_threshold=1, high_threshold=25)
lines = st.probabilistic_hough_line(edges, threshold=10, line_length=5,line_gap=3)
# 创建显示窗口.
fig, (ax0, ax1, ax2) = plt.subplots(1, 3, figsize=(16, 6))
plt.tight_layout()
#显示原图像
ax0.imshow(image, plt.cm.gray)
ax0.set_title('Input image')
ax0.set_axis_off()
#显示canny边缘
ax1.imshow(edges, plt.cm.gray)
ax1.set_title('Canny edges')
ax1.set_axis_off()
#用plot绘制出所有的直线
ax2.imshow(edges * 0)
for line in lines:
p0, p1 = line
ax2.plot((p0[0], p1[0]), (p0[1], p1[1]))
row2, col2 = image.shape
ax2.axis((0, col2, row2, 0))
ax2.set_title('Probabilistic Hough')
ax2.set_axis_off()
plt.show()














 172
172











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









