3、 Canny算法的实现流程
由于本文主要目的在于学习和实现算法,而对于图像读取、视频获取等内容不进行阐述。因此选用OpenCV算法库作为其他功能的实现途径(关于OpenCV的使用,作者将另文表述)。首先展现本文将要处理的彩色图片。
图2 待处理的图像
3.1 图像读取和灰度化
编程时采用上文所描述的第二种方法来实现图像的灰度化。其中ptr数组中保存的灰度化后的图像数据。具体的灰度化后的效果如图3所示。
- IplImage* ColorImage = cvLoadImage( "12.jpg", -1 );
- IplImage* OpenCvGrayImage;
- unsigned char* ptr;
- if (ColorImage == NULL)
- return;
- int i = ColorImage->width * ColorImage->height;
- BYTE data1;
- BYTE data2;
- BYTE data3;
- ptr = new unsigned char[i];
- for(intj=0; j<ColorImage->height; j++)
- {
- for(intx=0; x<ColorImage->width; x++)
- {
- data1 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3];
- data2 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3 + 1];
- data3 = (BYTE)ColorImage->imageData[j*ColorImage->widthStep + i*3 + 2];
- ptr[j*ColorImage->width+x]=(BYTE)(0.072169*data1 + 0.715160*data2 + 0.212671*data3);
- }
- }
- OpenCvGrayImage=cvCreateImageHeader(cvGetSize(ColorImage), ColorImage->depth, 1);
- cvSetData(GrayImage,ptr, GrayImage->widthStep);
- cvNamedWindow("GrayImage",CV_WINDOW_AUTOSIZE);
- cvShowImage("GrayImage",OpenCvGrayImage);
- cvWaitKey(0);
- cvDestroyWindow("GrayImage");
图3 灰度化后的图像
3.2 图像的高斯滤波
根据上面所讲的边缘检测过程,下一个步骤就是对图像进行高斯滤波。可根据之前博文描述的方法获取一维或者二维的高斯滤波核。因此进行图像高斯滤波可有两种实现方式,以下具体进行介绍。
首先定义该部分的通用变量:
- double nSigma = 0.4;
- int nWidowSize = 1+2*ceil(3*nSigma);
- int nCenter = (nWidowSize)/2;
两种方法都需要用到的变量:
- int nWidth = OpenCvGrayImage->width;
- int nHeight = OpenCvGrayImage->height;
- unsigned char* nImageData = new unsigned char[nWidth*nHeight];
- unsigned char*pCanny = new unsigned char[nWidth*nHeight];
- double* nData = new double[nWidth*nHeight];
- for(int j=0; j<nHeight; j++)
- {
- for(i=0; i<nWidth; i++)
- nImageData[j*nWidth+i] = (unsigned char)OpenCvGrayImage->imageData[j*nWidth+i];
- }
3.2.1 根据一维高斯核进行两次滤波
1)生成一维高斯滤波系数
-
- double* pdKernal_1 = new double[nWidowSize];
- double dSum_1 = 0.0;
-
-
-
-
-
-
-
-
- for(int i=0; i<nWidowSize; i++)
- {
- double nDis = (double)(i-nCenter);
- pdKernal_1[i] = exp(-(0.5)*nDis*nDis/(nSigma*nSigma))/(sqrt(2*3.14159)*nSigma);
- dSum_1 += pdKernal_1[i];
- }
- for(i=0; i<nWidowSize; i++)
- {
- pdKernal_1[i] /= dSum_1;
- }
2)分别进行x向和y向的一维加权滤波,滤波后的数据保存在矩阵pCanny中
- for(i=0; i<nHeight; i++)
- {
- for(j=0; j<nWidth; j++)
- {
- double dSum = 0;
- double dFilter=0;
- for(int nLimit=(-nCenter); nLimit<=nCenter; nLimit++)
- {
- if((j+nLimit)>=0 && (j+nLimit) < nWidth )
- {
- dFilter += (double)nImageData[i*nWidth+j+nLimit] * pdKernal_1[nCenter+nLimit];
- dSum += pdKernal_1[nCenter+nLimit];
- }
- }
- nData[i*nWidth+j] = dFilter/dSum;
- }
- }
-
- for(i=0; i<nWidth; i++)
- {
- for(j=0; j<nHeight; j++)
- {
- double dSum = 0.0;
- double dFilter=0;
- for(int nLimit=(-nCenter); nLimit<=nCenter; nLimit++)
- {
- if((j+nLimit)>=0 && (j+nLimit) < nHeight)
- {
- dFilter += (double)nData[(j+nLimit)*nWidth+i] * pdKernal_1[nCenter+nLimit];
- dSum += pdKernal_1[nCenter+nLimit];
- }
- }
- pCanny[j*nWidth+i] = (unsigned char)(int)dFilter/dSum;
- }
- }
3.2.2 根据二维高斯核进行滤波
1)生成二维高斯滤波系数
-
- double* pdKernal_2 = new double[nWidowSize*nWidowSize];
- double dSum_2 = 0.0;
-
-
-
-
-
-
-
- for(i=0; i<nWidowSize; i++)
- {
- for(int j=0; j<nWidowSize; j++)
- {
- int nDis_x = i-nCenter;
- int nDis_y = j-nCenter;
- pdKernal_2[i+j*nWidowSize]=exp(-(1/2)*(nDis_x*nDis_x+nDis_y*nDis_y)
- /(nSigma*nSigma))/(2*3.1415926*nSigma*nSigma);
- dSum_2 += pdKernal_2[i+j*nWidowSize];
- }
- }
- for(i=0; i<nWidowSize; i++)
- {
- for(int j=0; j<nWidowSize; j++)
- {
- pdKernal_2[i+j*nWidowSize] /= dSum_2;
- }
- }
2)采用高斯核进行高斯滤波,滤波后的数据保存在矩阵pCanny中
- int x;
- int y;
- for(i=0; i<nHeight; i++)
- {
- for(j=0; j<nWidth; j++)
- {
- double dFilter=0.0;
- double dSum = 0.0;
- for(x=(-nCenter); x<=nCenter; x++)
- {
- for(y=(-nCenter); y<=nCenter; y++)
- {
- if( (j+x)>=0 && (j+x)<nWidth && (i+y)>=0 && (i+y)<nHeight)
- {
- dFilter += (double)nImageData [(i+y)*nWidth + (j+x)]
- * pdKernal_2[(y+nCenter)*nWidowSize+(x+nCenter)];
- dSum += pdKernal_2[(y+nCenter)*nWidowSize+(x+nCenter)];
- }
- }
- }
- pCanny[i*nWidth+j] = (unsigned char)dFilter/dSum;
- }
- }
3.3 图像增强——计算图像梯度及其方向
根据上文分析可知,实现代码如下
-
-
-
-
- double* P = new double[nWidth*nHeight];
- double* Q = new double[nWidth*nHeight];
- int* M = new int[nWidth*nHeight];
- double* Theta = new double[nWidth*nHeight];
-
- for(i=0; i<(nHeight-1); i++)
- {
- for(j=0; j<(nWidth-1); j++)
- {
- P[i*nWidth+j] = (double)(pCanny[i*nWidth + min(j+1, nWidth-1)] - pCanny[i*nWidth+j] + pCanny[min(i+1, nHeight-1)*nWidth+min(j+1, nWidth-1)] - pCanny[min(i+1, nHeight-1)*nWidth+j])/2;
- Q[i*nWidth+j] = (double)(pCanny[i*nWidth+j] - pCanny[min(i+1, nHeight-1)*nWidth+j] + pCanny[i*nWidth+min(j+1, nWidth-1)] - pCanny[min(i+1, nHeight-1)*nWidth+min(j+1, nWidth-1)])/2;
- }
- }
-
- for(i=0; i<nHeight; i++)
- {
- for(j=0; j<nWidth; j++)
- {
- M[i*nWidth+j] = (int)(sqrt(P[i*nWidth+j]*P[i*nWidth+j] + Q[i*nWidth+j]*Q[i*nWidth+j])+0.5);
- Theta[i*nWidth+j] = atan2(Q[i*nWidth+j], P[i*nWidth+j]) * 57.3;
- if(Theta[i*nWidth+j] < 0)
- Theta[i*nWidth+j] += 360;
- }
- }
3.4 非极大值抑制
根据上文所述的工作原理,这部分首先需要求解每个像素点在其邻域内的梯度方向的两个灰度值,然后判断是否为潜在的边缘,如果不是则将该点灰度值设置为0.
首先定义相关的参数如下:
- unsigned char* N = new unsigned char[nWidth*nHeight];
- int g1=0, g2=0, g3=0, g4=0;
- double dTmp1=0.0, dTmp2=0.0;
- double dWeight=0.0;
其次,对边界进行初始化:
- for(i=0; i<nWidth; i++)
- {
- N[i] = 0;
- N[(nHeight-1)*nWidth+i] = 0;
- }
- for(j=0; j<nHeight; j++)
- {
- N[j*nWidth] = 0;
- N[j*nWidth+(nWidth-1)] = 0;
- }
进行局部最大值寻找,根据上文图1所述的方案进行插值,然后判优,实现代码如下:
- for(i=1; i<(nWidth-1); i++)
- {
- for(j=1; j<(nHeight-1); j++)
- {
- int nPointIdx = i+j*nWidth;
- if(M[nPointIdx] == 0)
- N[nPointIdx] = 0;
- else
- {
-
-
-
-
-
-
- if( ((Theta[nPointIdx]>=90)&&(Theta[nPointIdx]<135)) ||
- ((Theta[nPointIdx]>=270)&&(Theta[nPointIdx]<315)))
- {
-
- g1 = M[nPointIdx-nWidth-1];
- g2 = M[nPointIdx-nWidth];
- g3 = M[nPointIdx+nWidth];
- g4 = M[nPointIdx+nWidth+1];
- dWeight = fabs(P[nPointIdx])/fabs(Q[nPointIdx]);
- dTmp1 = g1*dWeight+g2*(1-dWeight);
- dTmp2 = g4*dWeight+g3*(1-dWeight);
- }
-
-
-
-
-
- else if( ((Theta[nPointIdx]>=135)&&(Theta[nPointIdx]<180)) ||
- ((Theta[nPointIdx]>=315)&&(Theta[nPointIdx]<360)))
- {
- g1 = M[nPointIdx-nWidth-1];
- g2 = M[nPointIdx-1];
- g3 = M[nPointIdx+1];
- g4 = M[nPointIdx+nWidth+1];
- dWeight = fabs(Q[nPointIdx])/fabs(P[nPointIdx]);
- dTmp1 = g2*dWeight+g1*(1-dWeight);
- dTmp2 = g4*dWeight+g3*(1-dWeight);
- }
-
-
-
-
-
- else if( ((Theta[nPointIdx]>=45)&&(Theta[nPointIdx]<90)) ||
- ((Theta[nPointIdx]>=225)&&(Theta[nPointIdx]<270)))
- {
- g1 = M[nPointIdx-nWidth];
- g2 = M[nPointIdx-nWidth+1];
- g3 = M[nPointIdx+nWidth];
- g4 = M[nPointIdx+nWidth-1];
- dWeight = fabs(P[nPointIdx])/fabs(Q[nPointIdx]);
- dTmp1 = g2*dWeight+g1*(1-dWeight);
- dTmp2 = g3*dWeight+g4*(1-dWeight);
- }
-
-
-
-
-
- else if( ((Theta[nPointIdx]>=0)&&(Theta[nPointIdx]<45)) ||
- ((Theta[nPointIdx]>=180)&&(Theta[nPointIdx]<225)))
- {
- g1 = M[nPointIdx-nWidth+1];
- g2 = M[nPointIdx+1];
- g3 = M[nPointIdx+nWidth-1];
- g4 = M[nPointIdx-1];
- dWeight = fabs(Q[nPointIdx])/fabs(P[nPointIdx]);
- dTmp1 = g1*dWeight+g2*(1-dWeight);
- dTmp2 = g3*dWeight+g4*(1-dWeight);
- }
- }
-
- if((M[nPointIdx]>=dTmp1) && (M[nPointIdx]>=dTmp2))
- N[nPointIdx] = 128;
- else
- N[nPointIdx] = 0;
- }
- }
3.5双阈值检测实现
1)定义相应参数如下
- int nHist[1024];
- int nEdgeNum;
- int nMaxMag = 0;
- int nHighCount;
2)构造灰度图的统计直方图,根据上文梯度幅值的计算公式可知,最大的梯度幅值为:
因此设置nHist为1024足够。以下实现统计直方图:
- for(i=0;i<1024;i++)
- nHist[i] = 0;
- for(i=0; i<nHeight; i++)
- {
- for(j=0; j<nWidth; j++)
- {
- if(N[i*nWidth+j]==128)
- nHist[M[i*nWidth+j]]++;
- }
- }
3)获取最大梯度幅值及潜在边缘点个数
- nEdgeNum = nHist[0];
- nMaxMag = 0;
- for(i=1; i<1024; i++)
- {
- if(nHist[i] != 0)
- {
- nMaxMag = i;
- }
- nEdgeNum += nHist[i];
- }
4)计算两个阈值
- double dRatHigh = 0.79;
- double dThrHigh;
- double dThrLow;
- double dRatLow = 0.5;
- nHighCount = (int)(dRatHigh * nEdgeNum + 0.5);
- j=1;
- nEdgeNum = nHist[1];
- while((j<(nMaxMag-1)) && (nEdgeNum < nHighCount))
- {
- j++;
- nEdgeNum += nHist[j];
- }
- dThrHigh = j;
- dThrLow = (int)((dThrHigh) * dRatLow + 0.5);
这段代码的意思是,按照灰度值从低到高的顺序,选取前79%个灰度值中的最大的灰度值为高阈值,低阈值大约为高阈值的一半。这是根据经验数据的来的,至于更好地参数选取方法,作者后面会另文研究。
5)进行边缘检测
- SIZE sz;
- sz.cx = nWidth;
- sz.cy = nHeight;
- for(i=0; i<nHeight; i++)
- {
- for(j=0; j<nWidth; j++)
- {
- if((N[i*nWidth+j]==128) && (M[i*nWidth+j] >= dThrHigh))
- {
- N[i*nWidth+j] = 255;
- TraceEdge(i, j, dThrLow, N, M, sz);
- }
- }
- }
以上代码在非极大值抑制产生的二值灰度矩阵的潜在点中按照高阈值寻找边缘,并以所找到的点为中心寻找邻域内满足低阈值的点,从而形成一个闭合的轮廓。然后对于不满足条件的点,可用如下代码直接删除掉。
-
- for(i=0; i<nHeight; i++)
- {
- for(j=0; j<nWidth; j++)
- {
- if(N[i*nWidth+j] != 255)
- {
- N[i*nWidth+j] = 0 ;
- }
- }
- }
其中TraceEdge函数为一个嵌套函数,用于在每个像素点的邻域内寻找满足条件的点。其实现代码如下:
- void TraceEdge(int y, int x, int nThrLow, LPBYTE pResult, int *pMag, SIZE sz)
- {
-
- int xNum[8] = {1,1,0,-1,-1,-1,0,1};
- int yNum[8] = {0,1,1,1,0,-1,-1,-1};
- LONG yy,xx,k;
- for(k=0;k<8;k++)
- {
- yy = y+yNum[k];
- xx = x+xNum[k];
- if(pResult[yy*sz.cx+xx]==128 && pMag[yy*sz.cx+xx]>=nThrLow )
- {
-
- pResult[yy*sz.cx+xx] = 255;
-
- TraceEdge(yy,xx,nThrLow,pResult,pMag,sz);
- }
- }
- }
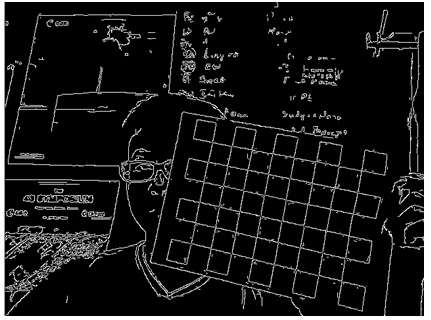
以上就从原理上实现了整个Canny算法。其检测效果如图4所示。注意:以上代码仅为作者理解所为,目的是验证本人对算法的理解,暂时没有考虑到代码的执行效率的问题。
图4 边缘检测结果
4、扩展
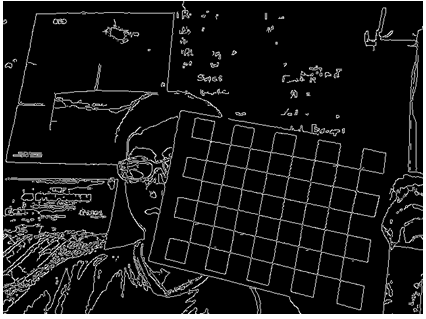
首先看一下OpenCV中cvCanny函数对该图像的处理结果,如图5所示。
图5 OpenCV中的Canny边缘检测结果
对比图4和图5可以发现,作者自己实现的边缘检测效果没有OpenCV的好,具体体现在:1)丢失了一些真的边缘;2)增加了一些假的边缘。
经过对整个算法的来回检查,初步推断主要的问题可能在于在进行灰度矩阵梯度幅值计算式所采用的模板算子性能不是太好,还有就是关于两个阈值的选取方法。关于这两个方面的改进研究,后文阐述。
5、总结
本文是过去一段时间,对图像边缘检测方法学习的总结。主要阐述了Canny算法的工作原理,实现过程,在此基础上基于VC6.0实现了该算法,并给出了效果图。最后,通过对比发现本文的实现方法虽然能够实现边缘检测,但效果还不是很理想,今后将在阈值选取原则和梯度幅值算子两个方面进行改进。
























 1214
1214

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









