






集装箱卡车,亦称“集卡车”或“集卡”。使用集装箱转运货物的载货汽车。主要特点有:(1) 具有足够的强度;(2) 途中转运不用移动箱内货物即可直接换装;(3) 可进行快速装卸;(4) 便于货物的装满和卸空;(5) 具有1立方米(即35.32立方英尺)或以上的容积。
为实现集装箱码头水平运输的无人化,将传统集卡升级改造为无人集卡,在传统集卡上加装视觉相机、激光雷达、毫米波雷达和其他传感器等,并搭载自动驾驶计算平台,同时搭配无人驾驶车队管理系统、高精度地图等,使传统集卡具备环境感知、高精度定位、规划决策和底盘自动控制等功能,从而在整体上实现集卡水平运输的无人化。这一升级改造既能最大程度减少对码头现有基础设施的影响,又能显著降低用工成本,提升安全生产水平,帮助码头实现良好的经济效益和社会效益。
0 引言
自动驾驶技术在港口的应用是智慧港口建设中不可缺少的组成部分之一。自动驾驶技术本身又是一个复杂的系统工程,牵涉到政府相关的产业政策、技术方案、行业标准、安全规范、交通法规、保险责任等诸多方面。目前,国家相关法律法规对于自动驾驶汽车上路试验和随后的大规模推广应用还存在一些障碍。无人驾驶车辆目前在国内大多数城市只能申请临时上路行驶,主要用于测试,还不能在社会道路上进行常态化运营。然而,无人驾驶技术在港口内部应用却有着得天独厚的条件。港口内部属于半封闭区域,港区内的道路交通状况较为单一。参与水平运输的集卡车辆时速一般不超过30 km/h。在港口内部使用无人驾驶集卡,对无人驾驶系统中环境感知、决策规划、车辆控制等模块的实现难度和计算要求都有所降低。因此,在港口内部更易实现无人驾驶集卡的规模化应用。
在港口内使用无人集卡承担水平运输作业,能大量减少港口内集卡驾驶人员数量,大幅降低人工成本和相关管理费用等。使用纯电动无人集卡还可显著降低码头水平运输设备的燃油成本,经济效益显著,并能实现车辆尾气零排放,符合国家提出的绿色港口建设方向,对绿色港口建设具有重要意义。同时,使用无人集卡作为水平运输设备,还能完全避免码头业务繁忙时司机可能出现的疲劳驾驶问题,从而提升码头安全生产水平,为码头带来良好的社会效益。
1 系统规划
1.1 系统整体规划
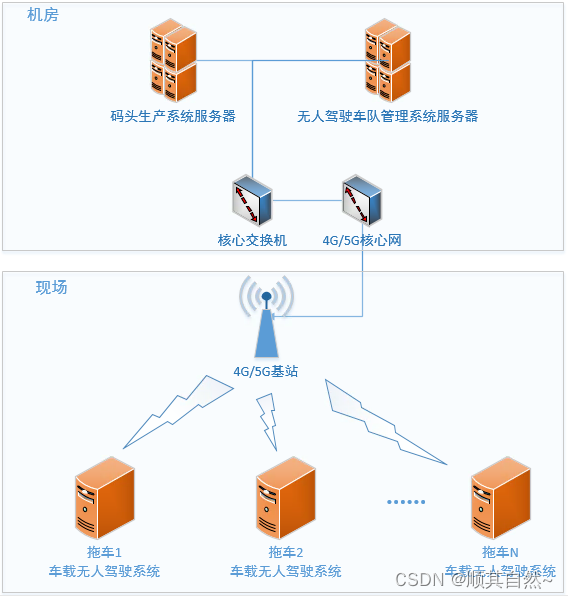
目前,行业内自动化集装箱码头水平运输设备主要分为跨运车和集卡等2种。在无人集卡制造模式上,又分为磁钉导航的AVG模式、利用传统集卡改造而成的无人集卡模式。在磁导AVG模式中,需要配置专用的磁导传感器,并在码头内划出专用场地,铺设大量磁钉,为AVG的自动行驶提供连续的导航信息。AVG的行驶区域还需要与进港收提箱的外来集卡隔离。这就需要在堆场上设置交接区,让AVG与外来集卡进行集装箱的交接。该模式对码头基建投入要求较高,资金需求量较大,且需要占用一定面积的堆场作为交接区。第2种模式是在传统集卡上加装视觉相机、激光雷达、毫米波雷达和其他传感器等,并搭载自动驾驶计算平台,从而实现集卡的无人驾驶。国内大量已经投产的传统码头和半自动化码头若要转型升级为智慧港口,在引入无人驾驶技术时采用第2种模式,即将现有传统集卡升级改造为无人集卡,能最大程度减少对码头现有基础设施的改造,且对传统集卡的升级改造可以分批进行,分批投入使用,无人集卡与传统的有人驾驶集卡混行作业,有人驾驶集卡再逐步替换为无人集卡。这样对码头运营的影响也更小。再配合研发一套无人驾驶车队管理系统,对所有无人集卡车辆进行整体调度控制。传统集卡升级改造为无人集卡后,应具备环境感知、高精度定位、规划决策和底盘自动控制等功能,并配合无人驾驶车队管理系统、高精度地图等的使用,就能够在整体上实现码头水平运输的无人化。系统整体结构示意图见图1。
1.2 系统设计目标
系统设计目标:港区内使用达到L4级(采用SAE分级,下同)自动驾驶技术的纯电动无人集卡作为水平运输设备;搭配服务端的无人集卡车队管理系统;通过LTE专网或5G网络进行无线通信,交互传输生产数据,从而控制无人集卡自动完成港区内的集装箱水平运输作业任务。
服务端的集卡车队管理系统需要能够实现全港区的无人集卡作业任务统筹安排,合理下发作业指令给无人集卡,同时接收无人集卡实时上报的位置和状态信息,并持续优化分派给无人集卡的作业任务,从系统调度层面促使每辆集卡都能高效、顺畅地按计划完成每一次水平运输作业。
集卡上的车载无人驾驶系统搭载高精度地图,具备融合感知、融合定位功能,按照收到的生产系统下发的作业指令,快速规划出行驶路线,并自动进行车辆底盘控制,使集卡向作业目的地行驶。在此过程中,车载无人驾驶系统需要智能感知港区内各种工况下的港机、其他设备和障碍物等,自动完成行驶过程中的车道保持、转向、避障等操作,按照作业指令的要求自动行驶到作业地点,并控制集卡与岸桥实现精确定位,使无人集卡与场桥或岸桥能够完成集装箱交接。根据码头作业工况要求,无人集卡需要将自身与岸桥之间的定位精度控制在3 cm以内,以便岸桥顺利完成集卡托架上的抓放箱作业。
2 系统设计
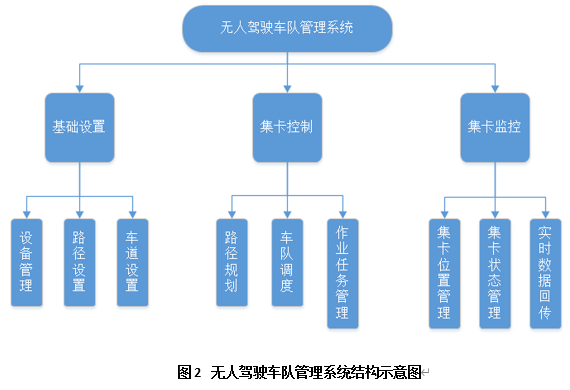
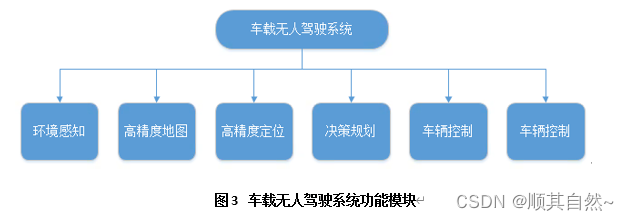
整个系统可分为服务端的无人集卡车队管理系统和集卡上的车载无人驾驶系统。无人集卡车队管理系统主要包括基础信息设置、集卡车队管理、集卡监控等模块。车载无人驾驶系统主要包括融合感知、高精度地图、高精度定位、决策规划、底盘控制和状态上报等模块。
2.1 无人集卡车队管理系统
该系统的基础信息设置模块功能主要包括所有无人集卡基本信息定义、港区内水平运输逻辑路网地图的初始化设置(例如道路、路口、作业贝位、岸边和堆场内的作业车道设置等)、系统运行所需的各类参数设置等。集卡车队管理模块功能主要包括对无人集卡车队的整体调度、对每辆无人集卡的水平运输作业任务的交互管理、当前作业的初始路径规划、当前作业任务执行时间管理等。集卡监控模块能够收集每辆无人集卡当前所在位置的经纬度信息、集卡当前行驶速度、集卡在整个水平运输作业过程中的运行轨迹、集卡当前正在执行的作业任务等信息。待5G网络应用成熟后,无人集卡车队管理系统还能将无人集卡行驶过程中相机拍摄的实时图像和激光雷达扫描的点云数据,通过5G网络实时回传到服务端,从而进一步满足码头作业人员对无人集卡运行过程中的各类监控需求。无人驾驶车队管理系统结构示意图见图2。
在集卡车队调度模块中,设计高效的调度算法以提升无人集卡作业效率。算法设计是车队管理系统中较为核心的部分。通过算法设计建立科学的集卡调度数学模型,对全场无人集卡进行实时最优调度。算法主要设计思路是选取合适的集卡与待分配的指令进行配对,尽量使所有无人集卡执行水平运输作业指令耗费的时间最短。
2.2 车载无人驾驶系统
在集卡上搭载车载无人驾驶系统实现单车无人驾驶。该系统使用基于人工智能的机器学习算法,根据各类车载传感器采集的周边环境信息,进行目标检测、识别、分类、定位和集卡的运动预测。环境感知模块负责获取集卡上安装的各种传感器所采集的信息,并将这些信息通过算法融合到一起,从而更加准确地感知当前集卡行进道路上和道路周边的环境信息,再将融合感知得到的信息传递给依托于高精度地图的高精度定位模块和无人驾驶决策规划模块,实时计算集卡的自动行驶轨迹,最后将运算结果持续传给底盘控制模块。底盘控制模块再操控无人集卡根据当前的路况进行车道保持、自动避障、自动转向和加减速等一系列动作,使无人集卡按照作业指令的要求,在规定时间内自动行驶到作业目标位置。在整个水平运输作业过程中,车载无人驾驶系统会通过4G或5G无线网络持续向服务端的车队管理系统上报当前集卡的位置、状态等信息。车载无人驾驶系统功能模块见图3。
3 系统应用
3.1 应用场景
无人集卡在港区范围内能应用于所有的水平运输生产场景,承担集装箱在整个港区内部的全部水平运输任务。
3.1.1 装船作业
无人集卡车队管理系统下发装船作业调度指令到指定集卡的车载无人驾驶系统。车载系统控制无人集卡自动行驶到堆场指定贝位与场桥交互完成取箱。无人集卡再自动行驶到岸边指定岸桥下,与岸桥交接完成装船箱作业。
3.1.2 卸船作业
无人集卡车队管理系统下发卸船作业调度指令到指定集卡的车载无人驾驶系统。车载系统控制无人集卡自动行驶到指定岸桥下,与岸桥交互完成卸船箱压车。无人集卡再从岸边运输集装箱到堆场目标贝位与场桥交互,完成卸船箱落场作业。
3.1.3 岸边中转作业
无人集卡车队管理系统下发岸边中转作业调度指令到指定集卡的车载无人驾驶系统。车载系统控制无人集卡自动行驶到指定岸桥下,与岸桥交互完成卸船箱压车。无人集卡再自动行驶到二程船的装船作业岸桥下,与岸桥交接完成集装箱装船作业。
3.1.4 场内移箱作业
无人集卡车队管理系统下发场内移箱作业调度指令到指定集卡的车载无人驾驶系统。车载系统控制无人集卡自动行驶到指定贝位,与场桥交接完成取箱压车。无人集卡再自动行驶到移箱的目标贝位,与场桥交互完成放箱落场作业。
3.2 作业流程
在系统整体处理流程中,先由码头生产系统生成水平运输作业指令并发送给无人集卡车队管理系统。无人集卡车队管理系统收到作业指令后会将指令转换为拖车调度指令,并选择最合适执行当前指令的无人集卡,通过4G或5G无线网络,将调度指令下发到该集卡的车载无人驾驶系统,同时根据集卡当前的位置和状态,规划出本次水平运输作业的道路级的行驶路径,规划路径也会通过无线网络下发到车载无人驾驶系统。车载无人驾驶系统接收到调度指令后,根据道路级的规划路径,规划车道级的行车路线,自动避障和控制集卡车速,使无人集卡在指令规定的时间窗内自动行驶到作业地点。然后,无人集卡与港区内的其他作业机械协同作业,完成集装箱的交接,最终完成本次集装箱的水平运输作业。无人集卡将等待车队管理系统下发新的作业调度指令,再启动下一次自动水平运输作业任务。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









