









Background
why 2-phase?
在所有partial-synchronize条件下的leader-based BFT算法中,至少需要2-phase才能保证在leader-failure时的safety。第二个phase存在的本质就是为proposal提供一个lock机制。2-phase的情况下能够保证节点在commit一个proposal时,至少有f+1个non-faulty lock在该proposal,即节点在接受到phase-1的QC时,节点vote for phase-2 and lock on the proposal。
what is lock? 在2-phase情况下,一个节点如果lock on在某个proposal,那么这个节点会在view-change之后,对new leader发出的new proposal,如果new proposal conflict with old proposal,则该节点会拒绝投票,除非该节点可以看到有至少f+1个节点也lock on 该new proposal
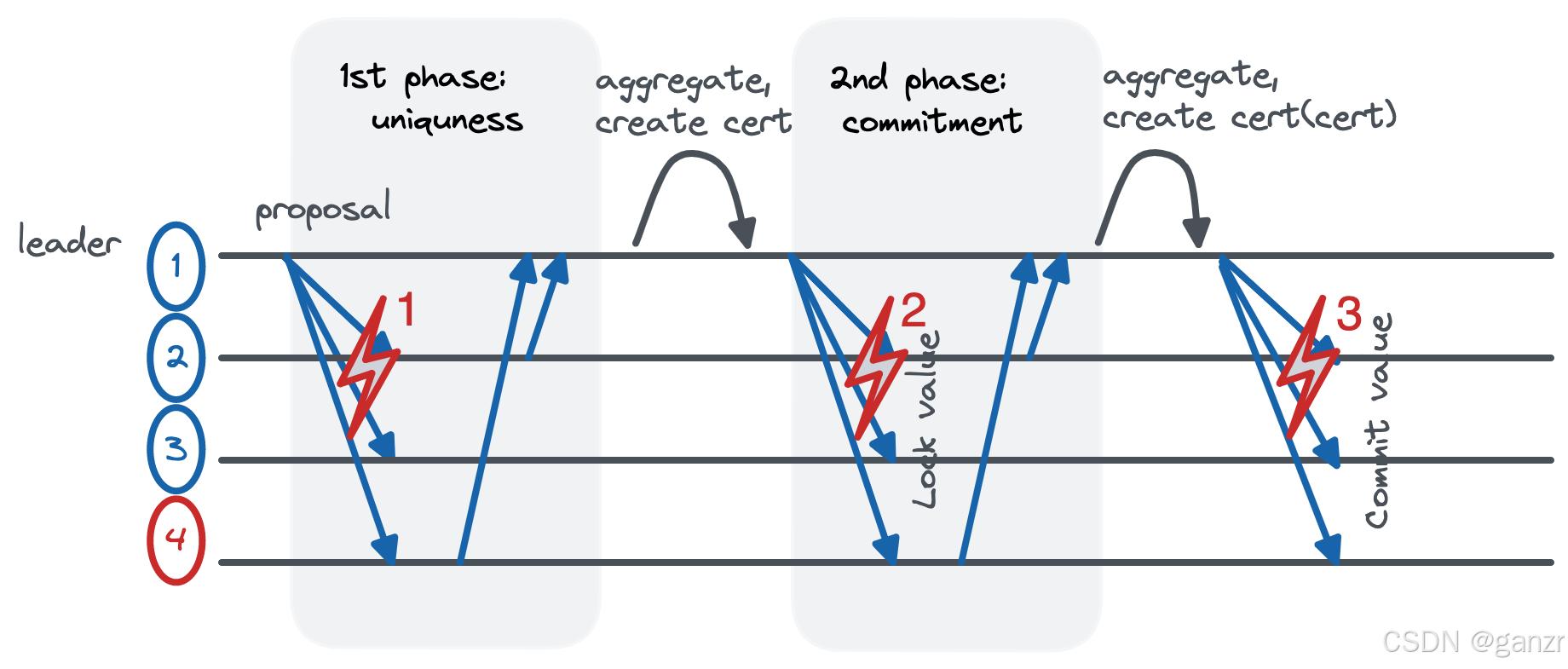
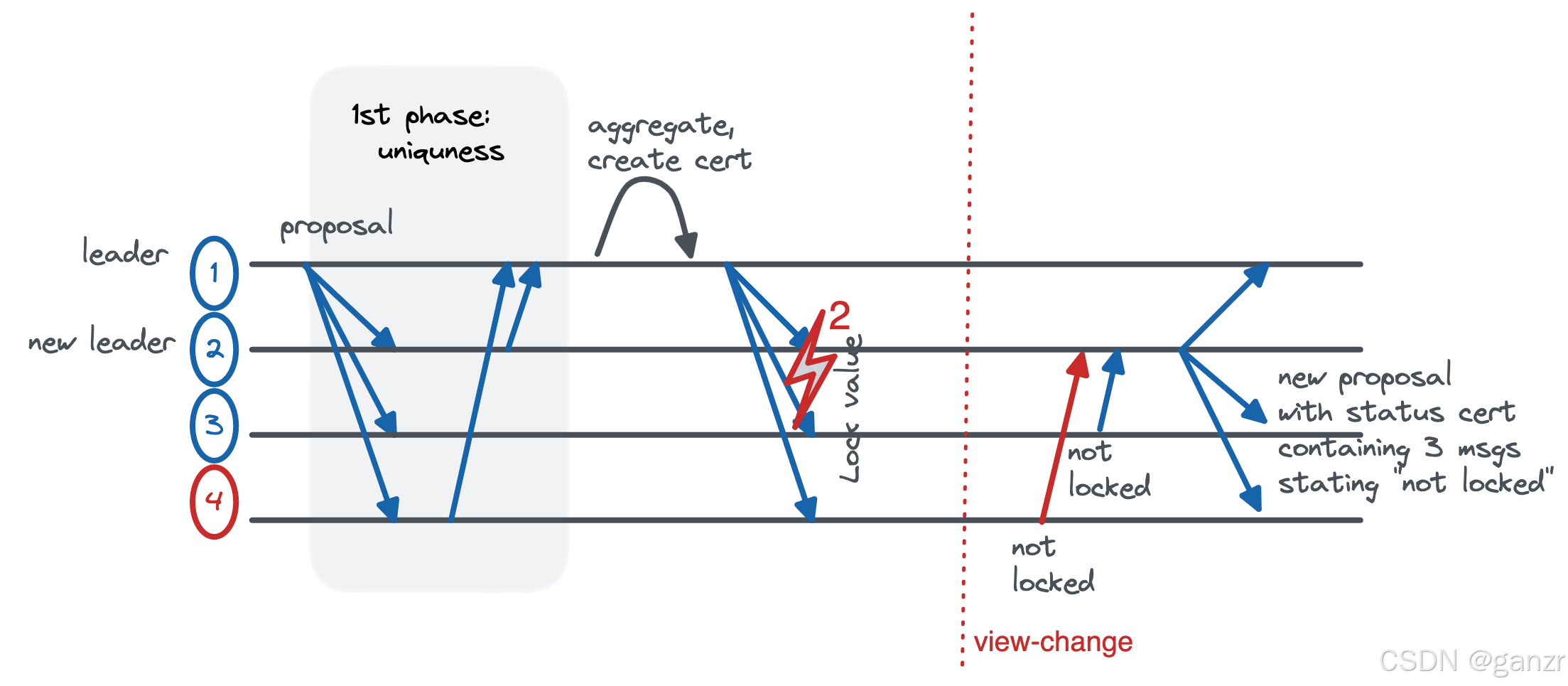
2-phase BFT
why not 1-phase?
在1-phase的情况下,节点只要收到一个proposal 的QC就会commit,这会导致其他没有收到该QC的节点给另一个conflicting proposal投票并构建conflicting QC,从而破坏了safety。
why 3-phase ?
2-phase中,lock机制带来的副作用就是在leader failed的情况下节点间需要同步lock,这个同步操作会影响responsiveness。HotStuff增加额外的一个phase来实现optimistic responsiveness。在view-change过程中,有可能出现prepareQC只有一个non-faulty持有,所以new leader必须等待足够长的时间来保证能够保证接收到该prepareQC,否则持有该prepareQC的non-faulty节点会一直lock,从而影响liveness。
what is responsive? iff 一个分布式系统的事务处理延时只与真实的网络延迟有关时,该分布式系统是responsive的。例如在2-phase的hotstuff中,每次view-change,new leader都要等待一个预先设定的时间来确保收到了所有non-faulty的节点的high_qc,
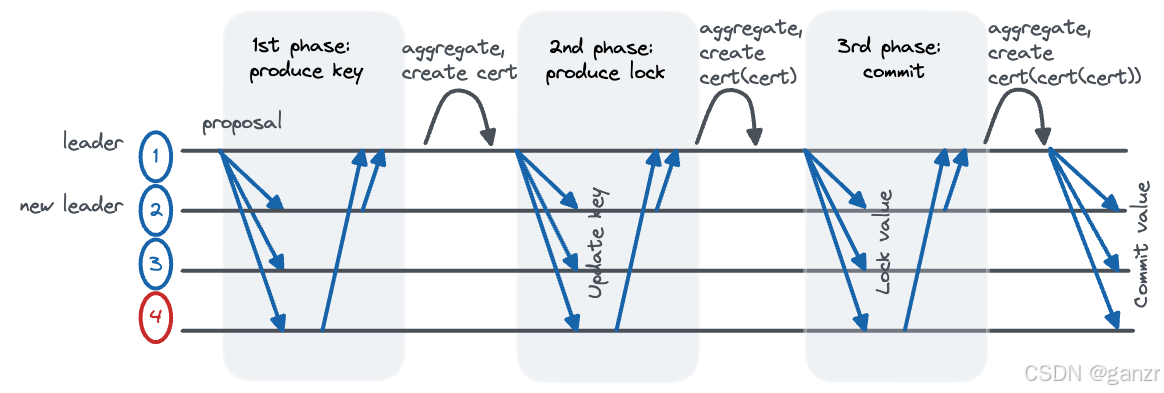
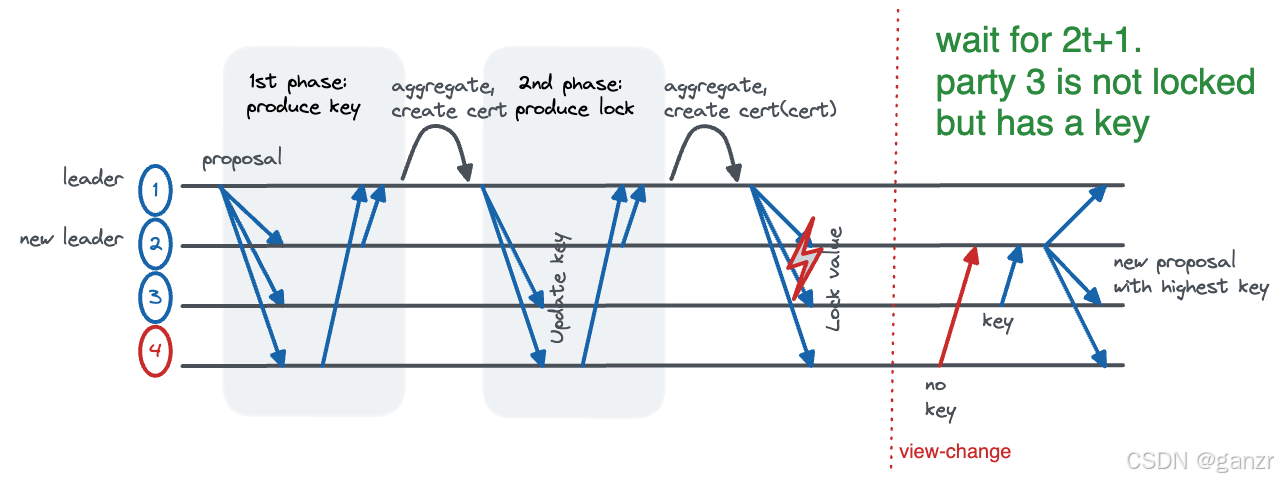
3-phase HotStuff
在3-phase时,non-faulty节点在收到lockedQC时才会lock on the proposal,此时,至少有f+1个non-faulty节点会持有该proposal的prepareQC,所以new-leader只需要收集n-f个节点的high_qc就可以保证能够收到该proposal的prepareQC。
3-phase中,new-leader只需要收集n-f个high_qc就能保证同步到最高的lock 证明:如果一个节点lock,说明收到一个lockedQC,也就是n-f个节点收到了对应的proposalQC,也就是至少n-2f=f+1个non-faulty节点收到了propsalQC,此时收集的n-f个high_qc如果都不包含这f+1个节点的proposalQC,那么就至少需要有n-f+f+1=n+1个节点,这与只有n个节点矛盾,所以n-f个high_qc中至少包含一个最高的proposalQC
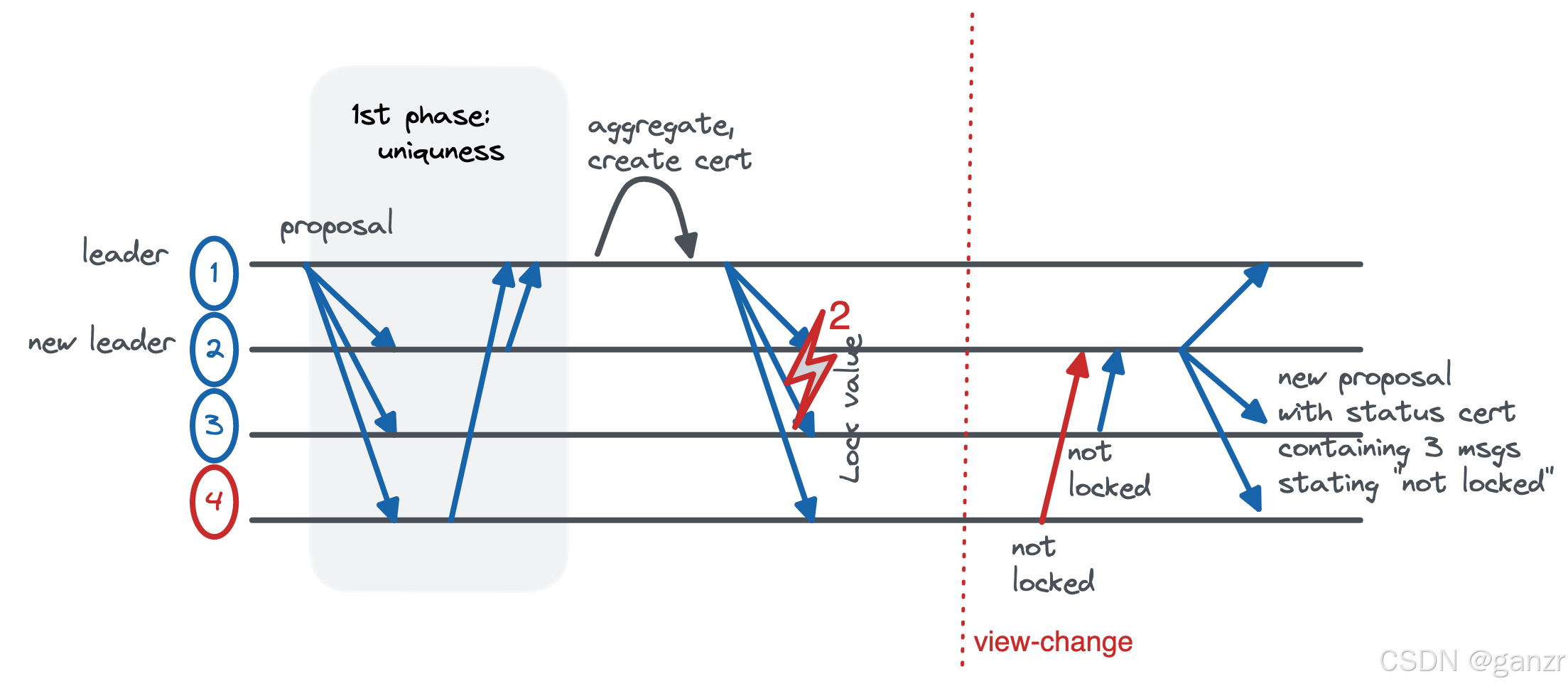
why not 3-phase?
可以看到,3-phase中,lock的条件被加强了,从原来收到prepareQC和vote for phase-2 到收到lockedQC。而所谓的commit,本质上就是节点判断n-f个节点lock on the proposal,而HotStuff就是用phase-3的投票构成的commitQC来实现这种判断。
对比2-phase可以看出,HotStuff其实是在prepareQC和commitQC中增加了一个lockedQC来保证lock能够在leader-failure时被获取到。
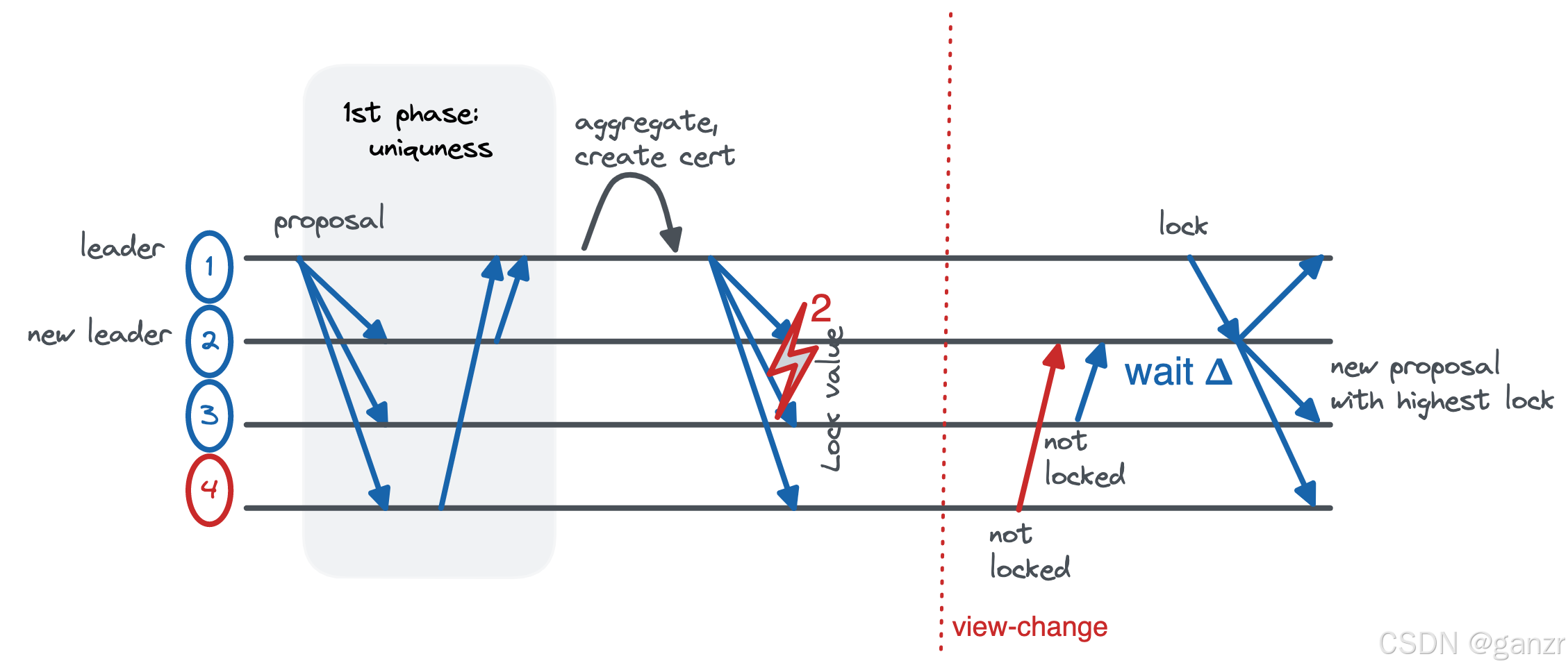
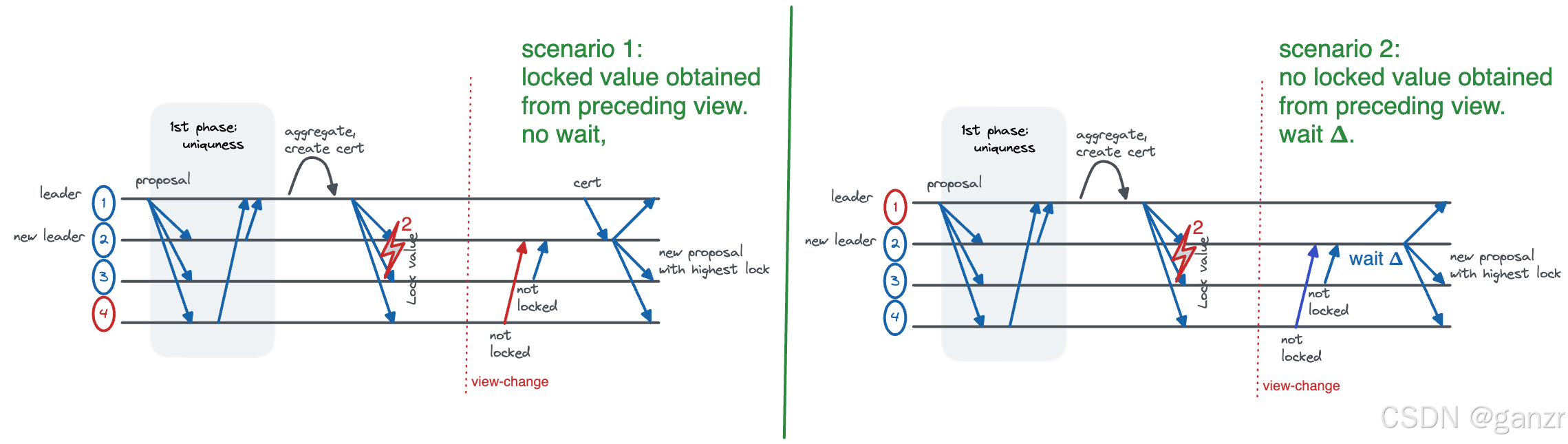
HotStuff-2的出发点就是,并不需要单独的lockedQC来保证new leader获取到最新的lock,因为最新的lock必然是上一个view中产生,所以如果new leader收到了上一个view的prepareQC,那么就可以确认自己收到了最新的lock,这也就解决了liveness的问题。如果没收到,则需要等待一个预设的最长延迟时间来保证最新的lock能够被接收到。
HotStuff-3本质上只要收到commitQC就能commit,但是为了保证足够的responsiveness,也就是某一个non-faulty结点不会长时间lock在一个proposal,hotstuff-3采用了必须QC的view必须连续的条件,因为连续,所以不可能有其他的分叉情况,故不会出现长期lock的情况。
what is the difference between lock and commit?
if 节点确定有n-f个节点lock on a proposal,这个节点才会commit该proposal。在2-phase中,节点接收到proposal的prepareQC并vote之后,节点lock on the proposal,在接收到phase-2的QC后,说明有n-f个节点lock on the proposal,节点commit the proposal;在3-phase中,节点在接收到proposal的lockedQC后(即phase-2的QC),节点lock on the proposal,在接收到phase-3的QC(即commit-QC)后,节点commit the proposal。
lock mechanism
- PBFT —— replicas broadcasts and collects locks when leader-failed
- Tendermint —— new leader wait for all locks from non-faulty replicas in view-change
- DiemBFT-v4 —— replicas broadcasts and collects locks when leader-failed
- HotStuff —— new leader waits for the first n-f locks in view-change
- HotStuff-2 —— wait for lock from preceding view or wait maximal message delay in view-change
这些共识的lock机制如下:
2-phase语意下:prepareQC——phase-1的QC,commitQC——phase-2的QC
3-phase语意下:prepareQC——phase-1的QC,lockedQC——phase-2的QC,commitQC——phase-3的QC
| protocol | when lock | when commit | sync lock | responsive | view-change complexity |
|---|---|---|---|---|---|
| PBFT | accept prepareQC and vote for prepareQC | accept commitQC | quadratic broadcast | yes | O(n2) |
| Tendermint | accept prepareQC and vote for prepareQC | accept commitQC | wait predetermined delay time | no | O(n) |
| DiemBFT-v4 | accept prepareQC and vote for prepareQC | accept commitQC | quadratic broadcast when timeout | yes | O(n) normal |
| O(n2) timeout | |||||
| HotStuff | accept lockedQC | accept commitQC | wait first n-f highest prepareQC | yes | O(n) |
| HotStuff-2 | accept prepareQC and vote for prepareQC | accept commitQC | wait util lock from last view or maximal delay | optimistic | O(n) |
Properties
- P0: 2-phase view regime
- P1: optimistically no wait over sequences of decisions(optimistic responsiveness)
- P2: optimistically linear communication
- P3: balanced communication load over sequences of decisions
- P4:O(n2) worst-case communication
| Name | feature | property | view-change complexity | authenticator complexity(correct leader/leader failure) |
|---|---|---|---|---|
| PBFT | 2-phase replace leader when failed extra protocol for view-change | P0,P1 | O(n2) | O(n2)/O(n3) |
| Tendermint | 2-phase leader-rotation maximal network delay in view-change | P0,P2,P3 | O(n) | O(n)/O(n) |
| HotStuff | 3-phase leader-rotation wait for the first n-f high_qc in view-change | P1,P2,P3,P4 | O(n) | O(n)/O(n) |
| DiemBFT-v4 | 2-phase leader-rotation extra protocol for timeout(quadratic view-change when timeout) | P0,P1,P2,P3 | O(n2) | O(n)/O(n) |
| HotStuff-2 | 2-phase leader-rotation maximal network delay in timeout | P0,P1,P2,P3,P4 | O(n) | O(n)/O(n) |
Reference
【1】Eli Gafni. Round-by-round fault detectors (extended abstract): unifying synchrony and asynchrony. In Proceedings of the Seventeenth Annual ACM Symposium on Principles of Distributed Computing (PODC ’98), 1998. https://dl.acm.org/doi/pdf/10.1145/277697.277724
【3】https://arxiv.org/pdf/1803.05069.pdf
【4】What is the difference between PBFT, Tendermint, HotStuff, and HotStuff-2?

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









