







俯视机器学习
有了梦寐以求的知识,是否就算是拥有春天!
第7章 梯度下降法和牛顿法
1. 迭代法框架
算法1:广义下降法
- 给定起始点 x ∈ d o m f x\in {\rm dom} f x∈domf
- 循环
- 选择下降方向 Δ x \Delta x Δx.
- 确定搜索步长 t > 0 t\gt 0 t>0.
- 更新. x : = x + t Δ x x := x+t\Delta x x:=x+tΔx
- 直到满足结束条件
2. 精确线搜索
目的:确定
t
t
t。取
t
′
=
a
r
g
m
i
n
t
≥
0
f
(
x
+
t
Δ
x
)
(1)
t' = \mathop{\rm argmin}\limits_{t\ge 0} f(x+t\Delta x) \tag{1}
t′=t≥0argminf(x+tΔx)(1)
即为最佳值。
3. 回溯线搜索
回溯线搜索(Backtracking line search)是一种不精确的线搜索方法,具体如下
算法2:回溯线搜索
- 给定初始点 x ∈ d o m f x\in {\rm dom f} x∈domf 、下降方向 Δ x \Delta x Δx, α ∈ ( 0 , 0.5 ) , β ∈ ( 0 , 1 ) , t = 1 \alpha\in(0, 0.5), \beta\in(0,1), t=1 α∈(0,0.5),β∈(0,1),t=1。
- while
f
(
x
+
t
Δ
x
)
>
f
(
x
)
+
α
t
∇
f
(
x
)
T
Δ
x
f(x+t\Delta x) > f(x) + \alpha t\nabla f(x)^T \Delta x
f(x+tΔx)>f(x)+αt∇f(x)TΔx
- t : = β t t := \beta t t:=βt
4. 梯度下降法
关键:增量 Δ x = − ∇ f ( x ) \Delta x = -\nabla f(x) Δx=−∇f(x)。
算法3:梯度下降法
- 给定起始点 x ∈ d o m f x\in {\rm dom} f x∈domf.
- 重复
- Δ x : = − ∇ f ( x ) \Delta x := -\nabla f(x) Δx:=−∇f(x).
- 线搜索,确定步长 t t t.
- 更新, x : = x + t Δ x x :=x + t\Delta x x:=x+tΔx.
- 直到满足停止条件。
停止条件可根据需要设定,一种常见方法为:
给定一个较小值
ϵ
\epsilon
ϵ,
∥
∇
f
(
x
)
∥
2
≤
ϵ
\Vert \nabla f(x) \Vert_2 \le \epsilon
∥∇f(x)∥2≤ϵ
时停止。
5. 牛顿法推导
对
f
(
x
)
,
x
∈
R
n
f(x), x\in R^n
f(x),x∈Rn,可在
x
(
k
)
x^{(k)}
x(k) 处作二阶泰勒展开
f
(
x
)
=
f
(
x
(
k
)
)
+
∇
f
(
x
(
k
)
)
T
(
x
−
x
(
k
)
)
+
1
2
(
x
−
x
(
k
)
)
T
∇
2
f
(
x
(
k
)
)
)
(
x
−
x
(
k
)
)
+
o
(
∥
x
−
x
(
k
)
∥
2
)
f(x) = f(x^{(k)}) + \nabla f(x^{(k)})^T (x - x^{(k)}) + \frac{1}{2}(x-x^{(k)})^T \nabla^2 f(x^{(k)}))(x - x^{(k)}) + o(\Vert x-x^{(k)}\Vert^2)
f(x)=f(x(k))+∇f(x(k))T(x−x(k))+21(x−x(k))T∇2f(x(k)))(x−x(k))+o(∥x−x(k)∥2)
忽略高阶无穷小,有
f
(
x
)
≈
f
(
x
(
k
)
)
+
∇
f
(
x
(
k
)
)
T
(
x
−
x
(
k
)
)
+
1
2
(
x
−
x
(
k
)
)
T
∇
2
f
(
x
(
k
)
)
)
(
x
−
x
(
k
)
)
f(x)\approx f(x^{(k)}) + \nabla f(x^{(k)})^T (x - x^{(k)}) + \frac{1}{2}(x-x^{(k)})^T \nabla^2 f(x^{(k)}))(x - x^{(k)})
f(x)≈f(x(k))+∇f(x(k))T(x−x(k))+21(x−x(k))T∇2f(x(k)))(x−x(k))
则
∇
f
(
x
)
=
∇
f
(
x
(
k
)
)
+
∇
2
f
(
x
(
k
)
)
(
x
−
x
(
k
)
)
\nabla f(x) = \nabla f(x^{(k)}) + \nabla^2 f(x^{(k)})(x - x^{(k)})
∇f(x)=∇f(x(k))+∇2f(x(k))(x−x(k))
令
∇
f
(
x
)
=
0
\nabla f(x)=0
∇f(x)=0,解得
x
(
k
+
1
)
=
x
(
k
)
−
[
∇
2
f
(
x
(
k
)
)
]
−
1
∇
f
(
x
(
k
)
)
(1)
x^{(k+1)} = x^{(k)}-[\nabla^2 f(x^{(k)})]^{-1}\nabla f(x^{(k)}) \tag{1}
x(k+1)=x(k)−[∇2f(x(k))]−1∇f(x(k))(1)
公式
(
1
)
(1)
(1) 即为更新公式。
牛顿法采用二阶近似(例如:一维时采用二次函数近似,对于二次函数优化问题,可以一次迭代获得最优解),联系迭代法框架,这里相当于每次迭代步长取 1 1 1, 优化方向取 − [ ∇ 2 f ( x ( k ) ) ] − 1 ∇ f ( x ( k ) ) -[\nabla^2 f(x^{(k)})]^{-1}\nabla f(x^{(k)}) −[∇2f(x(k))]−1∇f(x(k)) 。
6. 编程实现梯度下降法,并求解简单二次规划问题
求下面二元函数最小值点:
f
(
x
)
=
1
2
(
x
1
2
+
10
x
2
2
)
=
1
2
[
x
1
,
x
2
]
[
1
0
0
10
]
[
x
1
x
2
]
=
1
2
x
T
A
x
f(x) = \frac{1}{2}(x_1^2 + 10 x_2^2) = \frac{1}{2}[x_1, x_2] \left[\begin{matrix} 1 & 0\\ 0 & 10 \end{matrix}\right] \left[\begin{matrix} x_1 \\ x_2 \end{matrix}\right] = \frac{1}{2}x^T A x
f(x)=21(x12+10x22)=21[x1,x2][10010][x1x2]=21xTAx
其中
x
∈
R
2
x\in R^2
x∈R2 。
条件数(矩阵最大特征值与最小特征值之比)为 10。其一阶导数、二阶导数分别为
∇
f
=
A
x
∇
2
f
=
A
\nabla f = Ax \\ \nabla^2 f = A
∇f=Ax∇2f=A
步长搜索分别用精确线搜索和不精确线搜索(回溯法)两种方式。
import numpy as np
import matplotlib.pyplot as plt
def draw(xs, save_path=""):
xx1 = np.linspace(-12, 12, 200)
xx2 = np.linspace(-5, 5, 200)
xx1, xx2 = np.meshgrid(xx1, xx2)
z = 1/2 * (xx1**2 + 10 * xx2**2)
plt.figure(figsize=(8,4))
plt.xlim([-12, 12])
plt.ylim([-5, 5])
plt.contour(xx1, xx2, z)
# 关键行
plt.plot(xs[:,0], xs[:,1], 'ro', xs[:,0], xs[:,1], 'k--')
if save_path:
plt.savefig(save_path)
plt.show()
x0 = np.array([10, 2]) # 初始点
A = np.array([[1, 0], [0, 10]])
ep = 1e-5
def f(x):
return 1/2 * (x.T @ A @ x)
def grad(x):
return A @ x
def hessian(x):
return A
def get_exact_t(x, dx):
t = -dx.T @ A @ x / (dx.T @ A @ dx)
return t
def get_inexact_t(x, dx, a=0.1, b=0.9):
t = 1.
while f(x + t*dx) > f(x) + a*t*(grad(x).T @ dx):
t = b * t
return t
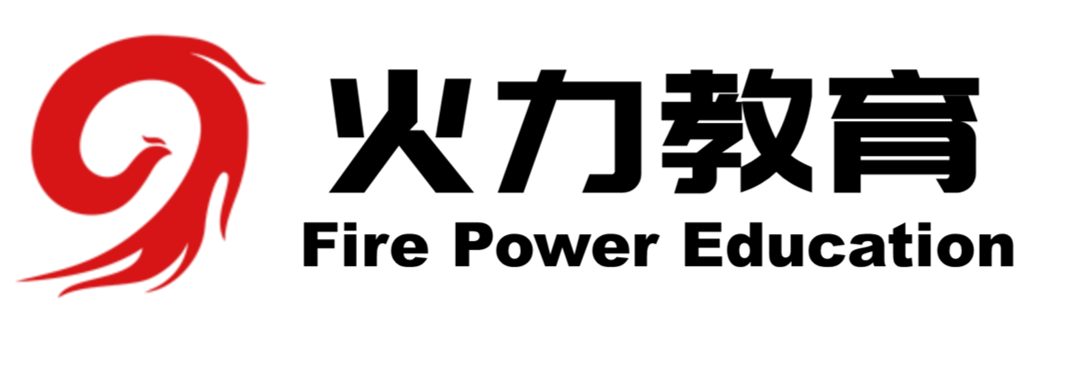
# 梯度下降法:精确线搜索
n1 = 0 # 迭代次数
x = x0
xs1 = [x]
while np.linalg.norm(grad(x)) > ep:
dx = -grad(x)
t = get_exact_t(x, dx)
x = x + t * dx
xs1.append(x)
n1 += 1
print(f'Exact line search, iterate {n1} times.')
xs1 = np.array(xs1)
draw(xs1)
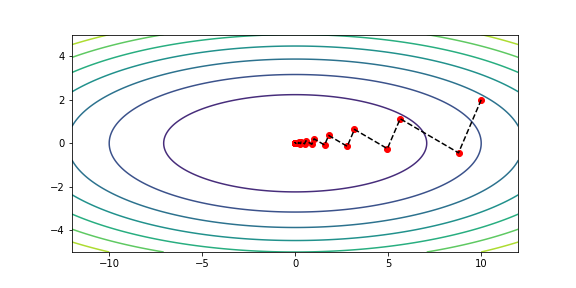
# 梯度下降法:不精确线搜索
n2 = 0 # 迭代次数
x = x0
xs2 = [x]
while np.linalg.norm(grad(x)) > ep:
dx = -grad(x)
t = get_inexact_t(x, dx)
x = x + t * dx
xs2.append(x)
n2 += 1
print(f'Inexact line search, iterate {n2} times.')
xs2 = np.array(xs2)
draw(xs2)
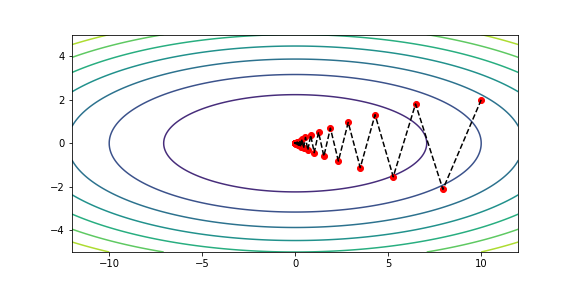
7. 编程实现牛顿法,并求解简单二次规划问题
# 牛顿法
n3 = 0 # 迭代次数
x = x0
xs3 = [x]
while np.linalg.norm(grad(x)) > ep:
dx = -np.linalg.inv(hessian(x)) @ grad(x)
x = x + dx
xs3.append(x)
n3 += 1
print(f'Newtons method, iterate {n3} times.')
xs3 = np.array(xs3)
draw(xs3)
版权申明:本教程版权归创作人所有,未经许可,谢绝转载!
交流讨论QQ群:784117704
部分视频观看地址:b站搜索“火力教育”
课件下载地址:QQ群文件(有最新更新) or 百度网盘PDF课件及代码
链接:https://pan.baidu.com/s/1lc8c7yDc30KY1L_ehJAfDg
提取码:u3ls















 564
564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









