






探索视觉新维度:CaliCam,立体与单目鱼眼相机的校准神器
项目介绍
在探索机器人视觉、自动驾驶以及全景摄影等领域的前沿阵地,高质量的图像处理和精确的相机校准变得至关重要。这就是CaliCam登场的地方——一个专为校准鱼眼镜头的立体与单目摄像头设计的强大开源工具。基于ICRA 2007年论文中提出的单视点全方位相机模型,CaliCam带来了前所未有的精确度和实用性,使开发者能够充分利用鱼眼镜头的广阔视野。
技术分析
CaliCam构建于OpenCV之上,至少兼容4.0版本,且经过了4.5.5版本的严格测试,确保了其核心算法的健壮性和效率。它不仅支持C++编程语言,也提供了Python接口,满足不同开发者的需求。通过精细的代码结构和对OpenCV高级功能(如立体匹配)的调用,CaliCam实现了从校准参数配置到实时图像调整的全链条自动化,大大简化了传统鱼眼镜头校准的复杂流程。
应用场景
想象一下无人机空中巡检、室内导航机器人或是VR内容制作——这些场景中,宽广视角的精准捕获至关重要。CaliCam通过提供精确的鱼眼摄像头校准解决方案,帮助各类设备获得更为真实的深度感知与环境映射。对于科研人员和工程师而言,它使得实验验证和产品原型开发中的相机标定环节变得更加高效准确。
项目特点
- 广泛的兼容性: 支持Ubuntu 22.04,无缝对接OpenCV 4.x系列。
- 双模式操作: 提供C++和Python两种运行方式,覆盖不同的开发习惯。
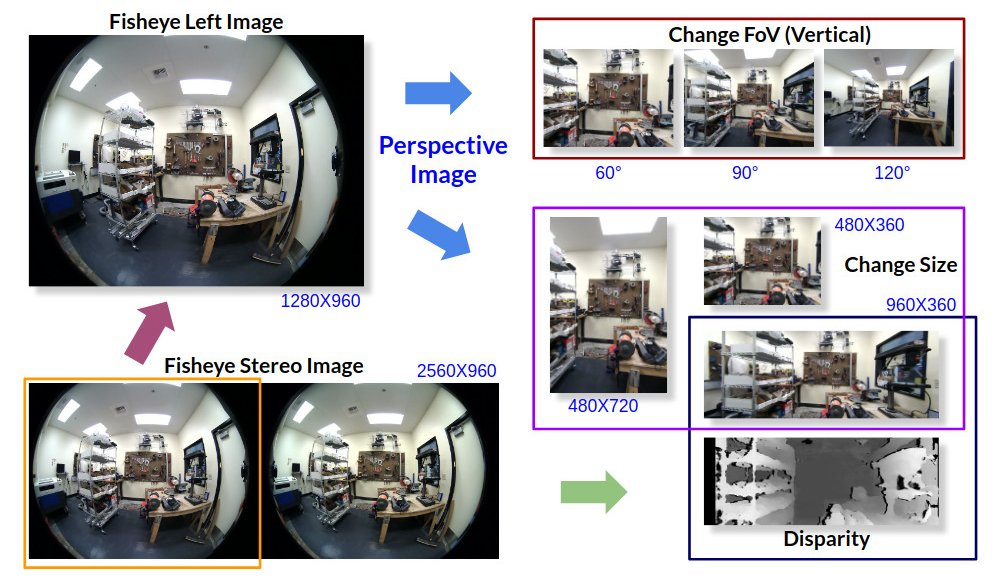
- 实时调整: 实时模式下,用户可通过窗口界面调整参数,直观地看到效果变化,包括垂直 FoV、图像尺寸及校正后的结果。
- 独特校准文件: 每个CaliCam相机都有专属的校准参数,确保最优化的成像效果。
- 教育与研究友好: 尽管主要面向应用开发,CaliCam背后的数学原理展示(例如矩阵求逆、特征向量等)也为学术探索提供了宝贵资源。
开始你的视觉之旅
集成CaliCam至你的项目中,意味着解锁更广阔的视觉世界,无论是进行复杂的环境感知还是追求创意拍摄,它都是不可或缺的工具。只需遵循简单指南,即可享受高精度校准带来的革命性提升。探索官方网站和在线教程,进一步挖掘CaliCam的潜力,让你的技术之旅更加畅通无阻。现在就加入这个不断壮大的社区,共同推进视觉技术的边界!
利用CaliCam,让每一帧画面都成为精确的艺术,无论是科研探索还是创新应用,都有了强大的后盾。立刻启程,与CaliCam一起,开启属于你的视觉盛宴。



























 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











