







 本文深入探讨了标量处理机的先行控制技术,包括指令的重叠执行方式、先行控制方式的原理及其解决的冲突问题。此外,还详细介绍了流水线技术的工作原理、分类和性能分析,如线性流水线、非线性流水线的调度方法,以及数据和控制相关性的处理。最后,讨论了超标量处理机、超流水线处理机和超标量超流水线处理机的结构与性能特点。
本文深入探讨了标量处理机的先行控制技术,包括指令的重叠执行方式、先行控制方式的原理及其解决的冲突问题。此外,还详细介绍了流水线技术的工作原理、分类和性能分析,如线性流水线、非线性流水线的调度方法,以及数据和控制相关性的处理。最后,讨论了超标量处理机、超流水线处理机和超标量超流水线处理机的结构与性能特点。
标量处理机
5 标量处理机
5.1 先行控制技术
5.1.1 指令的重叠执行方式

指令的三个阶段:
-
取指令:按照指令计数器的内容访问主存储器,取出一条指令送到指令寄存器
-
指令分析:对指令的操作码进行译码,按照给定的寻址方式和地址字段中的内容形成操作数地址,并用这个地址读取操作数。分析指令的时候,就要去寄存器中取数了。
-
指令执行:根据操作码要求,完成规定的功能,将运算结果写到寄存器或主存储器
1 顺序执行

- 优点:控制简单,节省设备
- 缺点,速度慢
2 一次重叠执行方式

缩短时间,提高功能部件利用率
3 二次重叠执行方式

执行n条指令的时间为 T = (2+n)*t
5.1.2 先行控制方式的原理
1 采用二次重叠执行方式必须解决两个问题
1) 有独立的取指令部件、指令分析部件和指令执行部件
- 把一个集中的指令控制器,分解成三个独立的控制器:存储控制器、指令控制器、运算控制器
2)主存储器的冲突问题 - 取指令、分析指令、执行指令都可能要访问存储器
2 解决访存冲突的方法
(1)低位交叉存取:不能根本解决冲突问题
(2)两个独立的存储器:独立的指令存储器和数据存储器
在许多高性能处理机中,有独立的指令Cache和数据Cache。这
种结构被称为哈佛结构
(3)先行控制技术

3 处理机结构
1) 三个独立的控制器: 存储控制器、指令控制器、运算控制器
2) 四个缓冲栈:先行指令缓冲栈、先行读数缓冲栈、先行操作栈、后行写数栈。

先行指令缓冲栈
- 作用:只要指令缓冲栈没有充满,就自动发出取指令的请求
- 设置两个程序计数器:线性程序计数器PC1,用来知识取指令;线性程序计数器PC,记录指令分析器正在分析的指令地址

存在的主要问题
- 各类指令“分析”和“执行”的时间相差很大、数据相关、
转移或转子程序指令
4 指令执行时序
- 设置了指令缓冲栈,取指令的时间就可以忽略不计。一条指令的执
行可分为2个过程,即指令分析和指令执行
1) 分析指令和执行指令的时间不相等:

2) 采用纤细你个缓冲栈的指令执行过程

5 先行缓冲栈

设置先行缓冲栈的目的:使指令分析器和指令执行部件能够独立工作
1)先行指令缓冲栈:
处于主存储器与指令分析器之间,用它来平滑主存储器取指令和指令分析器使用指令之间的速度差异
2) 先行操作栈:
- 采用先进先出方式工作,由指令寄存器堆和控制逻辑组成
- 指令分析器对已经放在先行指令缓冲栈里的指令进行预处理,把处理之后的指令送入先行操作栈
- 处于指令分析器和运算控制器之间,使指令分析器和运算器能够各自独立工作

3) 先行读数栈
- 由一组缓冲寄存器和有关控制逻辑等组成,处于主存储器与运算器之间,平滑运算器与主存储器的工作
- 每个缓冲寄存器由地址寄存器、操作数寄存器和标志三部分组成。也可以把地址寄存器和操作数寄存器合为一个
- 当收到从指令分析器中送来的有效地址时,将地址的有效标志置位,向主存申请读操作数
- 读出的操作数存放在操作数寄存器中或覆盖掉地址寄存器中的地址,置位数据有效标志
4) 后行写数栈
请添加图片描述
6 缓冲深度的设计方法
以静态分析为主,通过模拟来确定缓冲深度
1) 先行指令缓冲栈的设计
两种极端情况,设缓冲深度为 DI
尽可能让指令分析不断流
(1) 先行指令缓冲栈已经充满
(2) 先行指令缓冲栈原来为空
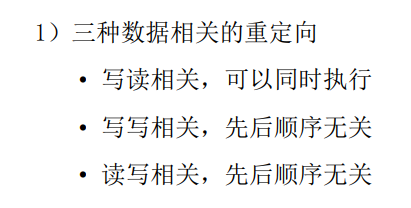
5.1.3 数据相关
数据相关: 在执行本条指令的过程中,如果用到的指令、操作数、变址量等是前面指令的执行结果,这种相关称为数据相关。
控制相关: 由条件分支、转子程序指令、中断等引起的相关
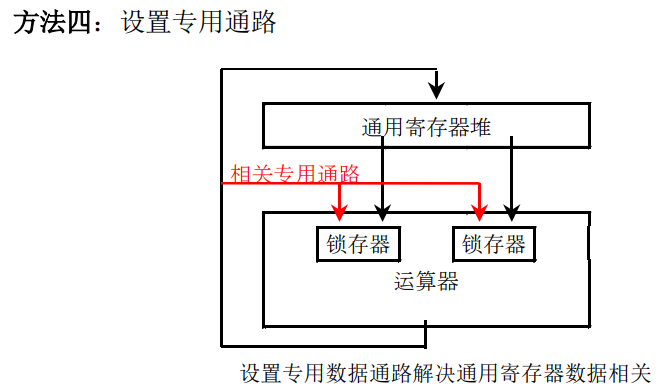
- 解决数据相关的两种方法: 退后处理,设置专用路径。
1 指令相关


解决指令相关的根本方法: 在程序执行过程中不允许修改指令
2 主存操作数相关
解决办法:后推法

3 通用寄存器数据相关

解决办法



4 变址相关

方法一: 推后分析
方法二: 设置变址相关专用通路

5.1.4 控制相关
- 因程序的执行方向可能被改变而引起的相关,也称为全局相关
- 无条件转移、一般条件转移、复合条件转移、中断
1 无条件转移
- 在流水线处理机中,无条件转移指令不进入执行流水段,一般在指令译码阶段就实际执行完成
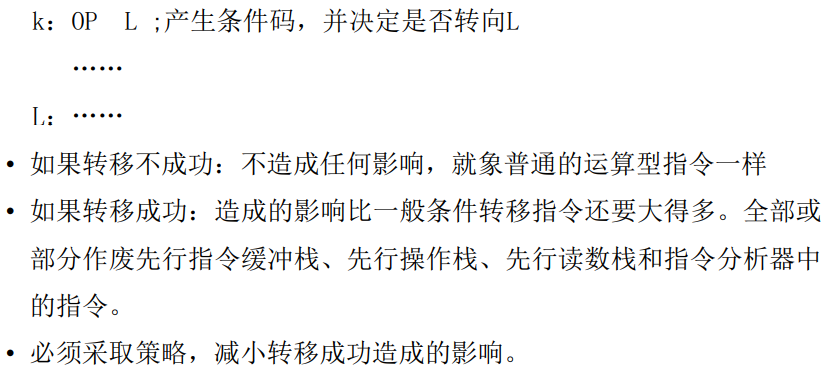
- 如果在处理机中设置有指令先行缓冲栈,则要全部或部分作废先行指令缓冲栈中的指令


2 一般条件转移

- 如果条件码是上一条指令产生,要等上一条指令执行完才能判断是否转移成功


3 复合条件转移

4 转移预测技术
1 软件猜测法: 通过编译器尽可能降低转移成功概率
2 硬件猜测法: 通过改变硬件结构来降低转移指令对流水线的影响
- 在先行指令缓冲站的入口处设置一个简单的指令分析器,当检测到转移指令是们就将转移目标地址L送入先行程序计数器PC1中,同时保留当前PC1中内容到另一个寄存器。
- 转移成功,猜测正确。对流水线没有影响
- 转移不成功,用保存下来的地址回复PC1和PC,清除先行指令缓冲栈、先行操作栈和先行读数栈,重新开始取指令
3 两个先行指令缓冲栈
- 在先行指令缓冲栈中增加一个先行目标缓冲栈
- 按照转移成功的方向预取指令到先行目标缓冲栈中
- 先行指令缓冲栈仍然按照转移不成功的方向继续预取指令
- 如果转移不成功,则继续分析原来先行指令缓冲栈中指令
- 如果转移成功,则分析新增设的先行目标缓冲栈中的指令

5.2 流水线技术
空间并行性: 设置多个独立地操作部件
时间并行性: 分时使用同一个部件的不同部分
5.2.1 流水线工作原理
- 在每一个流水段的末尾或开头必须设置一个寄存器,称为流水寄存器、流水锁存器、流水闸门寄存器等
- 加入流水寄存器,会增加指令的执行时间





流水线的主要特点:
- 只有连续提供同类任务才能发挥流水线效率; 尽量减少因条件分支造成的“断流”,通过编译技术提供连续的相同类型操作
- 每个流水线段都要设置一个流水寄存器
- 各流水段的时间应尽量相等。 流水线处理机的基本时钟周期等于时间最长的流水段的时间长度
- 流水线需要有“装入时间”和“排空时间”
5.2.2 流水线的分类
1 线性流水线和非线性流水线


按流水线级别来分
-
处理机流水线,又称为指令流水线
-
部件及流水线(操作流水线)

-
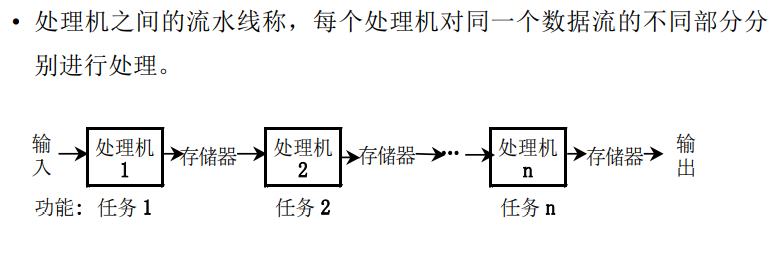
宏流水线
单功能流水线与多功能流水线
- 单功能流水线(Unifunction Pipelining):只能完成一种固定功
能的流水线。 - 多功能流水线(Multifunction Pipelining):流水线的各段通过
不同连接实现不同功能

4 静态流水线与动态流水线
静态流水线:同一段时间内,各个功能段只能按照一种方式连接,实现一种固定的功能

动态流水线: 在同一段时间内,各段可以按照不同的方式连接,同时执行多种功能。

5 流水线的其他分类方式
- 按照数据的表示方法: 标量流水和向量流水
- 按照控制方式: 同步流水线和异步流水线

- 顺序流水线与乱序流水线,乱序流水线又称为无序流水线、错序流水线或异步流水线等
5.2.3 线性流水线的性能分析
1 吞吐率
T
P
=
n
T
k
TP = \frac{n}{T_k}
TP=Tkn
其中:n为任务书,Tk为完成n个任务数所用的时间
- 各段执行时间相等,输入连续任务情况下,完成n个任务需要的总时间为:
T k = k △ t + ( n − 1 ) △ t T_k = k\triangle t + (n-1)\triangle t Tk=k△t+(n−1)△t
各段时间不等,完成n个连续任务:


(1) 如果瓶颈部分可分,则在细分


(2) “瓶颈”流水段重复设置:增加分配器和收集器

)]

2 加速比
加速比计算的基本公式:
S
=
顺序执行时间
T
0
流水线执行时间
T
k
S = \frac{顺序执行时间T_0}{流水线执行时间T_k}
S=流水线执行时间Tk顺序执行时间T0

当流水线段数增加时,需要连续输入的任务数也必须增加

3 效率
计算流水线效率的一般公式
E
=
n
个任务展用的时空区
k
个流水段的总时空区
E = \frac{n个任务展用的时空区}{k个流水段的总时空区}
E=k个流水段的总时空区n个任务展用的时空区


流水线的吞吐率、加速比与效率的关系

流水线最佳段数的选择


5 流水线性能分析举例
好好看看这个例子,我感觉会考原题



5.2.4 非线性流水线的调度
非线性流水线调度的任务是要找出一个最小的循环周期,按照这周期向流水线输入新任务,流水线的各个功能段都不会发生冲突,而且流水线的吞吐率和效率最高
1 非线性流水线的表示
流水线预约表

2 非线性流水线的冲突
- 启动距离: 连续输入两个任务之间的时间间隔
- 流水线冲突: 几个任务争用同一个流水线

3 无冲突调度方法
禁止向量 : 预约表中每一行任意两个“×”之间距离的集合。
(3,4,6)

冲突向量:
C
=
(
C
m
C
m
−
1
.
.
.
C
2
C
1
)
C = (C_mC_{m-1}...C_2C_1)
C=(CmCm−1...C2C1)
其中:m是禁止向量中的最大值。
如果i在禁止向量中,则Ci=1,否则Ci=0
(3,4,6) C=(101100)
状态图:将冲突向量逻辑右移,若移出去的位是1,则表示用相应启动距离向流水线输入新任务时会产生功能段冲突;若移出去的位是0,则表示不会产生功能段冲突
如果移k位后移出出0,则证明可以在k个间隔后,启动一次。
启动后,更新冲突向量:

构造状态转换图:
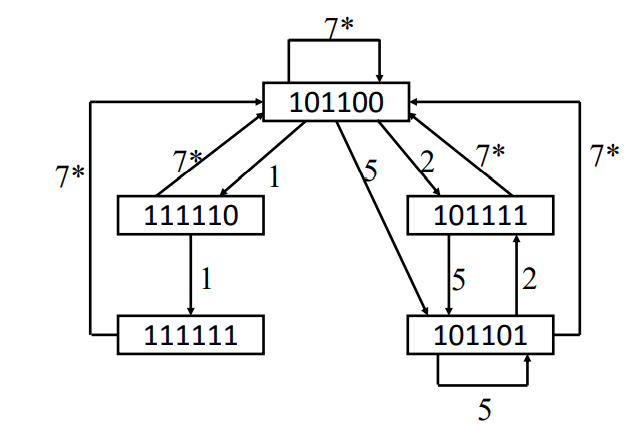
简单循环:在状态图中各种冲突向量只经过一次的启动循环

5.2.5 局部相关
指令相关、访存操作数相关和通用寄存器相关等都是局部相关。
1 顺序流动方式
任务按照顺序流入流水线,也按顺序流出流水线
- 优点: 流水线控制逻辑比较简单
- 缺点:吞吐率和效率比较低


2 乱序流动方式
指令流入流出流水想的顺序并不相同。错序流动方式、无序流动方式、异步流动方式

3 乱序流动中的数据相关



4 乱序流动中数据相关的避免方法
- 延迟执行
- 建立专用路径

5 数据重定向方法


6 Tomasulo 动态调度算法
5.2.6 全局相关
- 由条件转移或程序中断引起的相关称为全局相关
- 处理好条件转移和中断的两个关键问题: 确保流水线正常工作、减少断流引起效率和吞吐率下降
1 条件分支在流水线中执行过程

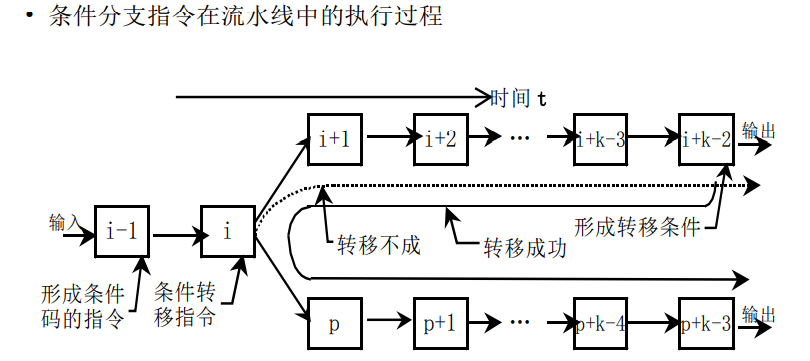

2 条件分支对流水线性能的影响


3 条件分支的处理方法
- 1 延迟转移技术和指令取消技术
- 2 动态分支预测技术: 根据近期转移是否成功的记录来预测下一次转移的方向
- 3 静态分支预测技术 : 转移预测的方向是确定的
- 4 提前形成条件码
4 动态分支预测技术
两个关键问题
- 如何记录转移历史信息
- 如何根据历史信息预测转移方向
记录转移历史信息的方法





5 提前形成条件码
- 只要在一个时钟周期之内产生条件码,流水线就不会“断流”
6 精确断点与不精确断点




采用精确(Precise)断点法,要设置一定数量的后援寄存器,把整个流水线中所有指令的执行结果和现场都保存下来
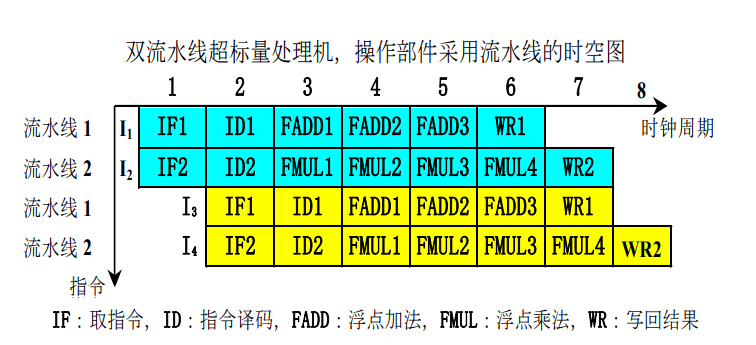
5.3 超标量处理机
三种主流处理机:
- 超标量处理机
- 超流水线处理机
- 超标量超流水线处理机

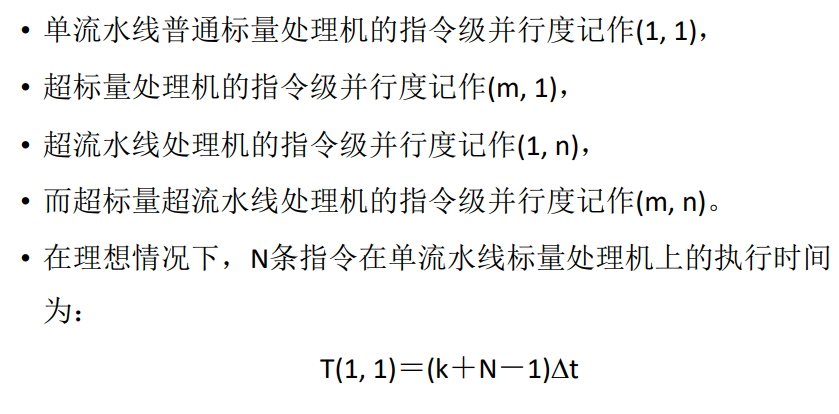
- 普通标量处理机:一条流水线一个多动嫩个部件,每个时钟周期平均执行指令的条数小于1
- 多操作部件标量处理机:一条指令流水线,多个独立的操作部件,指令级并行度小于1。
- 超标量处理机典型结构:多条并行工作的指令流水线,多个独立的操作部件,指令级并行度(ILP)大于1。


5.3.2 单发射与多发射
1 单发射处理机

2 多发射处理机




3 超标量处理机
- 有两条或两条以上能同时工作的指令流水线
- 先行指令窗口:能够从指令Cache中预取多条指令,能够对窗口内的指令进行数据相关性分析和功能部件冲突检测
- 操作部件的个数一般多于每个周期发射的指令条数。通常为4 个至16个操作部件
- 超标量处理机的指令级并行度:1<ILP<m

5.3.3 多流水线调度
- 顺序发射(in-order issue)与乱序发射(out-order issue):指令发射顺序是按照程序中指令排列顺序进行的称为顺序发射
- 顺序完成(in-order completion)与乱序完成(out-order completion):
指令完成顺序是按照程序中指令排列顺序进行的称为顺序完成
多流水线调度的三种方式:
- 顺序发射顺序完成
- 顺序发射乱序完成
- 乱序发射乱序完成



5.3.4 资源冲突

这个相差指的是指令序号相差, 如果采用部件操作流水线结构,使用同一操作的部件需要再下个周期被发射,因此序号相差应为m及m以上。
- 在超标量处理机中,操作部件一般要采用流水线结构
- 如果由于某种原因,操作部件不能采用流水线结构,则必须设置多个相同种类的操作部件
- 普通标量处理机,希望相同操作连续出现,只有连续出现相同操作的指令序列时,流水线的效率才能得到充分发挥
- 超标量处理机则正好相反,希望相同操作不要连续出现,相同操作的指令序列连续出现时,会发生资源冲突;要求相同操作的指令能够相对均匀地分布在程序中
5.3.5 超标量处理机性能

5.4 超流水线处理机

5.4.1 指令执行时序
- 每隔 1/n 个时钟周期发射一条指令,处理机的流水线周期为1/n个时钟周期。

5.4.3 超流水线处理机性能

5.5 超标量超流水线处理机
一个时钟周期发射m次,每次发射n条指令
5.5.1 指令执行时序

5.5.3 超标量超流水处理机性能

5.7.4 三种标量处理机的性能比较


- 目前,一般认为,m 和 n 都不要超过 4
- 一个特定程序由于受到本身的数据相关和控制相关的限制,它的指令级并行度的最大值是有限的,是有个确定的值


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









