







 作者:gzshun. 原创作品,转载请标明出处!来源:http://blog.csdn.net/gzshun本文开始讨论sd卡的格式化功能,平时使用windows操作系统,也经常格式化磁盘。涉及到的操作有这几步:1.将分区信息写到硬盘的第一个设备节点的MBR结构中的分区表;2.格式化分区到指定的文件系统类型。MBR中存放分区表的位置在446-509,占用了64字节,
作者:gzshun. 原创作品,转载请标明出处!来源:http://blog.csdn.net/gzshun本文开始讨论sd卡的格式化功能,平时使用windows操作系统,也经常格式化磁盘。涉及到的操作有这几步:1.将分区信息写到硬盘的第一个设备节点的MBR结构中的分区表;2.格式化分区到指定的文件系统类型。MBR中存放分区表的位置在446-509,占用了64字节,
作者:gzshun. 原创作品,转载请标明出处!
来源:http://blog.csdn.net/gzshun
本文开始讨论sd卡的格式化功能,平时使用windows操作系统,也经常格式化磁盘。涉及到的
操作有这几步:
1.将分区信息写到硬盘的第一个设备节点的MBR结构中的分区表;
2.格式化分区到指定的文件系统类型。
MBR中存放分区表的位置在446-509,占用了64字节,MBR结构只支持4个主分区,所以
来源:http://blog.csdn.net/gzshun
本文开始讨论sd卡的格式化功能,平时使用windows操作系统,也经常格式化磁盘。涉及到的
操作有这几步:
1.将分区信息写到硬盘的第一个设备节点的MBR结构中的分区表;
2.格式化分区到指定的文件系统类型。
MBR中存放分区表的位置在446-509,占用了64字节,MBR结构只支持4个主分区,所以
有4个16字节的区域,先简要说明一下MBR的分区表的结构:
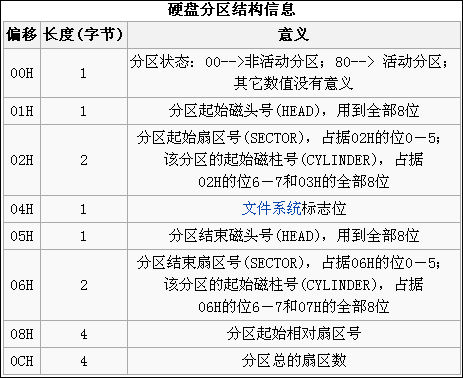
从这个表格可以看出,相对于446-509的分区表区域,每个主分区的第5个字节存放的是文件
系统标志位,用来识别什么分区,用fdisk工具查看一下,有如下文件系统对应的十六进制标志:
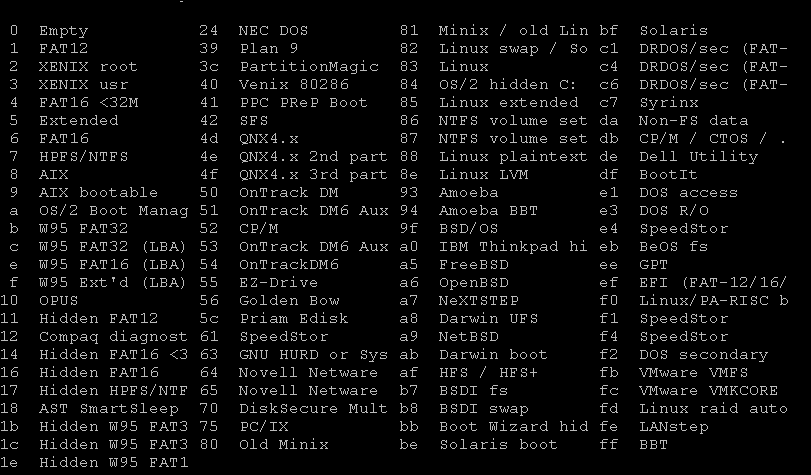
若需要读取这些文件系统标志,只需读取MBR的450个位置,占用一个字节大小。
扯得太远了,回到正题,本文是要分析Android格式化sd卡的功能,在格式化部分,涉及到
了系统的一些函数,与vold无关
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









