







通过在Matlab/Simlink软件仿真环境下对汽车稳定控制系统的仿真可出,以横摆角速度为控制变量,通过PI控制器调节质心侧偏角和横摆角速度,使得汽车始终保持在可操作的稳定状态,附带说明书
ID:4525649836110923
大哥尼夫斯基
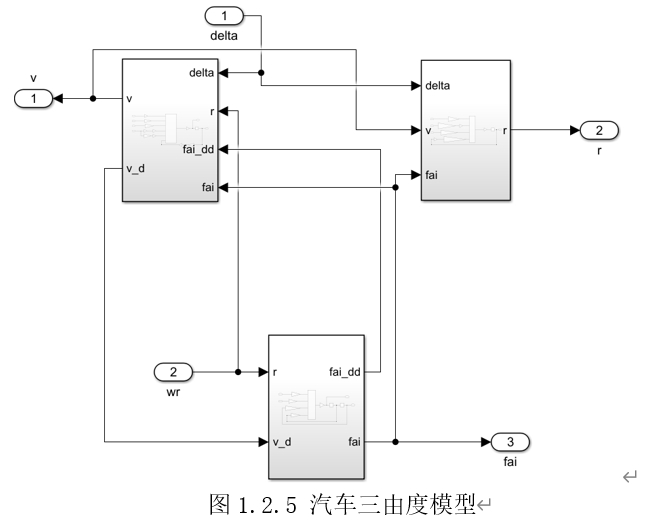
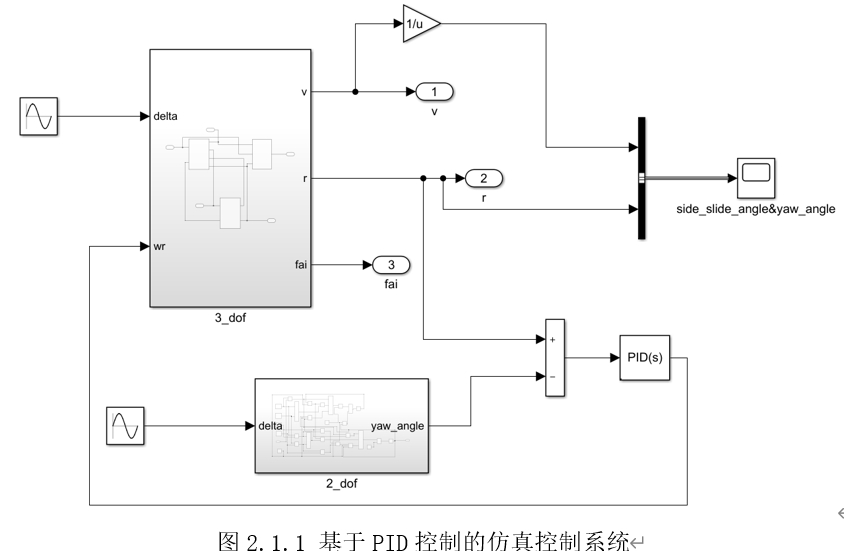
通过在Matlab Simlink软件仿真环境下对汽车稳定控制系统的仿真,可以实现对汽车在运行过程中的稳定性进行控制。其中,我们将以横摆角速度作为控制变量,并利用PI控制器来调节质心侧偏角和横摆角速度,以使汽车始终保持可操作的稳定状态。
汽车稳定性在实际行驶中起着至关重要的作用。一个稳定的汽车能够更好地应对突发状况,如急刹车、紧急避让等情况,提高驾驶安全性。同时,稳定的车辆行驶也能增加乘坐舒适度,提升驾驶者的驾驶体验。
在汽车稳定控制系统中,横摆角速度是一个重要的参数。横摆角速度代表了车辆在横向运动中的快速变化情况,是一个直接反映车辆稳定性
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









