







题目:简单的时间片轮转多道程序内核代码
一、简单的时钟中断程序
1、代码mymain.c
#include<linux/types.h>
#include<linux/module.h>
#include<linux/proc_fs.h>
#include<linux/kernel.h>
#include<linux/syscalls.h>
#include<linux/stackprotector.h>
#include<linux/string.h>
#include<linux/ctype.h>
#include<linux/delay.h>
#include<linux/ioport.h>
#include<linux/init.h>
#include<linux/initrd.h>
#include<linux/bootmem.h>
#include<linux/acpi.h>
#include<linux/tty.h>
#include<linux/percpu.h>
#include<linux/kmod.h>
#include<linux/vmalloc.h>
#include<linux/kernel_stat.h>
#include<linux/start_kernel.h>
#include<linux/security.h>
#include<linux/smp.h>
#include<linux/profile.h>
#include<linux/rcupdate.h>
#include<linux/moduleparam.h>
#include<linux/kallsyms.h>
#include<linux/writeback.h>
#include<linux/cpu.h>
#include<linux/cpuset.h>
#include<linux/cgroup.h>
#include<linux/efi.h>
#include<linux/tick.h>
#include <linux/interrupt.h>
#include<linux/taskstats_kern.h>
#include<linux/delayacct.h>
#include<linux/unistd.h>
#include<linux/rmap.h>
#include<linux/mempolicy.h>
#include<linux/key.h>
#include<linux/buffer_head.h>
#include<linux/page_cgroup.h>
#include<linux/debug_locks.h>
#include<linux/debugobjects.h>
#include<linux/lockdep.h>
#include<linux/kmemleak.h>
#include<linux/pid_namespace.h>
#include<linux/device.h>
#include<linux/kthread.h>
#include<linux/sched.h>
#include<linux/signal.h>
#include<linux/idr.h>
#include<linux/kgdb.h>
#include<linux/ftrace.h>
#include<linux/async.h>
#include<linux/kmemcheck.h>
#include<linux/sfi.h>
#include<linux/shmem_fs.h>
#include<linux/slab.h>
#include<linux/perf_event.h>
#include<linux/file.h>
#include<linux/ptrace.h>
#include<linux/blkdev.h>
#include<linux/elevator.h>
#include<asm/io.h>
#include<asm/bugs.h>
#include<asm/setup.h>
#include<asm/sections.h>
#include<asm/cacheflush.h>
#ifdefCONFIG_X86_LOCAL_APIC
#include<asm/smp.h>
#endif
void__init my_start_kernel(void)
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
printk(KERN_NOTICE"my_start_kernel here %d\n",i);
}
}
2、myinterupt.c程序代码如下:
#include<linux/kernel_stat.h>
#include<linux/export.h>
#include<linux/interrupt.h>
#include<linux/percpu.h>
#include<linux/init.h>
#include<linux/mm.h>
#include<linux/swap.h>
#include<linux/pid_namespace.h>
#include<linux/notifier.h>
#include<linux/thread_info.h>
#include<linux/time.h>
#include<linux/jiffies.h>
#include<linux/posix-timers.h>
#include<linux/cpu.h>
#include<linux/syscalls.h>
#include<linux/delay.h>
#include<linux/tick.h>
#include<linux/kallsyms.h>
#include<linux/irq_work.h>
#include<linux/sched.h>
#include<linux/sched/sysctl.h>
#include<linux/slab.h>
#include<asm/uaccess.h>
#include<asm/unistd.h>
#include<asm/div64.h>
#include<asm/timex.h>
#include<asm/io.h>
#defineCREATE_TRACE_POINTS
#include<trace/events/timer.h>
/*
* Called by timer interrupt.
*/
voidmy_timer_handler(void)
{
printk(KERN_NOTICE"\n>>>>>my_timer_handler here<<<<<\n\n");
}
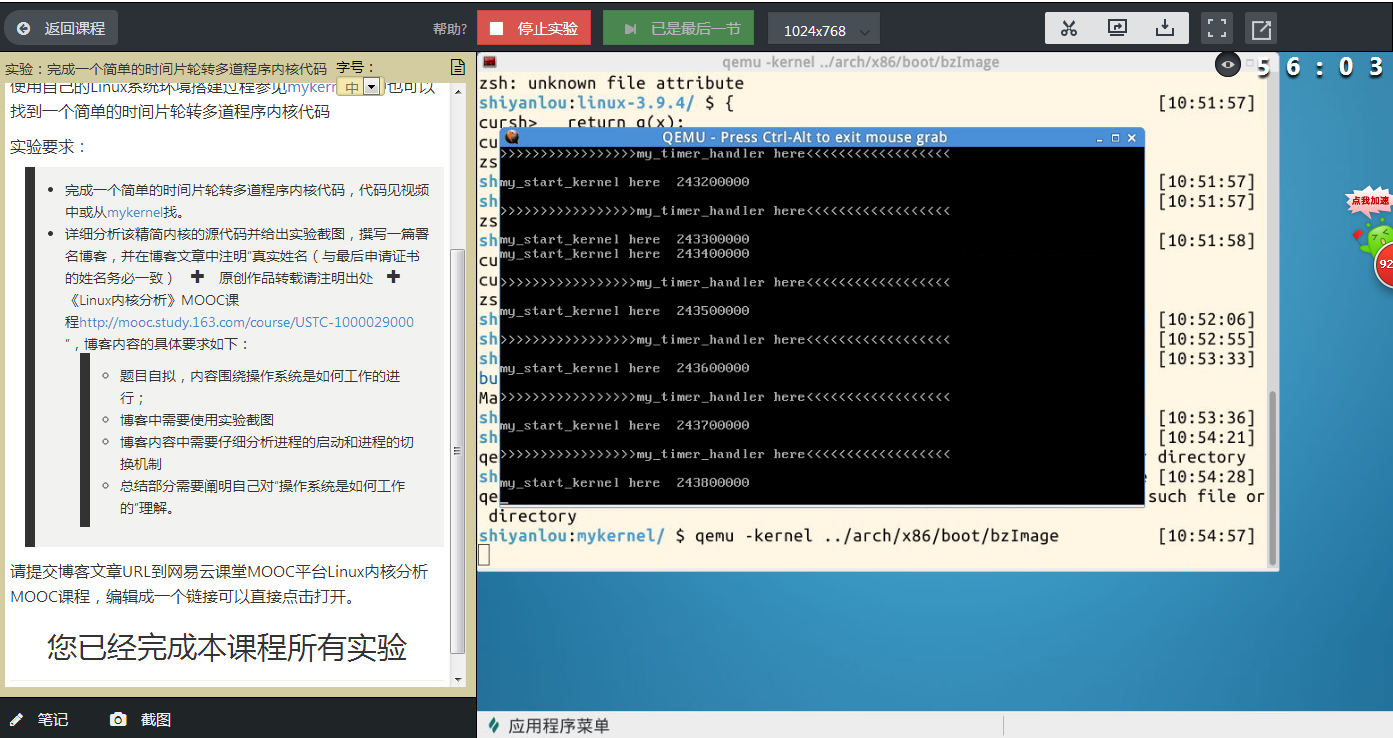
3、运行结果:
二、简单的时间片轮转多道程序
1、mypcb.h
#defineMAX_TASK_NUM 4
#defineKERNEL_STACK_SIZE 1024*8
/*CPU-specific state of this task */
structThread {
unsigned long ip;
unsigned long sp;
};
typedefstruct PCB{
int pid;
volatile long state; /* -1 unrunnable, 0 runnable, >0 stopped */
char stack[KERNEL_STACK_SIZE];
/* CPU-specific state of this task */
struct Thread thread;
unsigned long task_entry;
struct PCB *next;
}tPCB;
voidmy_schedule(void);
以上程序的结构为:

结构体包括:
Ø 1个pid位
Ø 1个state位
Ø 1个堆栈
Ø 1个线程(包括ip、sp)
Ø 1个入口与1个next位
2、mymain.c
#include<linux/types.h>
#include<linux/string.h>
#include<linux/ctype.h>
#include<linux/tty.h>
#include<linux/vmalloc.h>
#include"mypcb.h"
tPCBtask[MAX_TASK_NUM];
tPCB *my_current_task = NULL;
volatileint my_need_sched = 0;
voidmy_process(void);
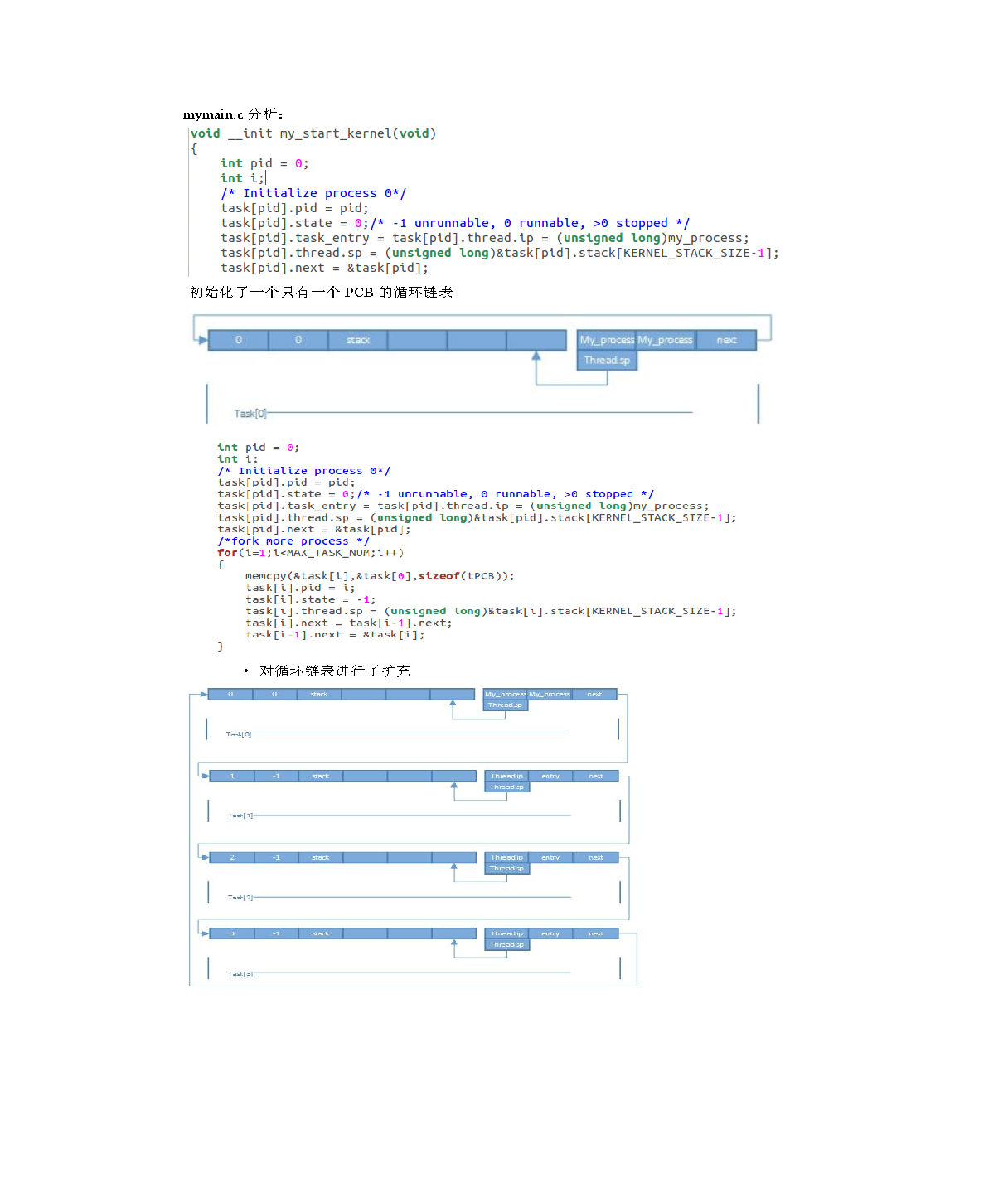
void__init my_start_kernel(void)
{
int pid = 0;
int i;
/* Initialize process 0*/
task[pid].pid = pid;
task[pid].state = 0;/* -1 unrunnable, 0runnable, >0 stopped */
task[pid].task_entry = task[pid].thread.ip= (unsigned long)my_process;
task[pid].thread.sp = (unsignedlong)&task[pid].stack[KERNEL_STACK_SIZE-1];
task[pid].next = &task[pid];
/*fork more process */
for(i=1;i<MAX_TASK_NUM;i++)
{
memcpy(&task[i],&task[0],sizeof(tPCB));
task[i].pid = i;
task[i].state = -1;
task[i].thread.sp = (unsignedlong)&task[i].stack[KERNEL_STACK_SIZE-1];
task[i].next = task[i-1].next;
task[i-1].next = &task[i];
}
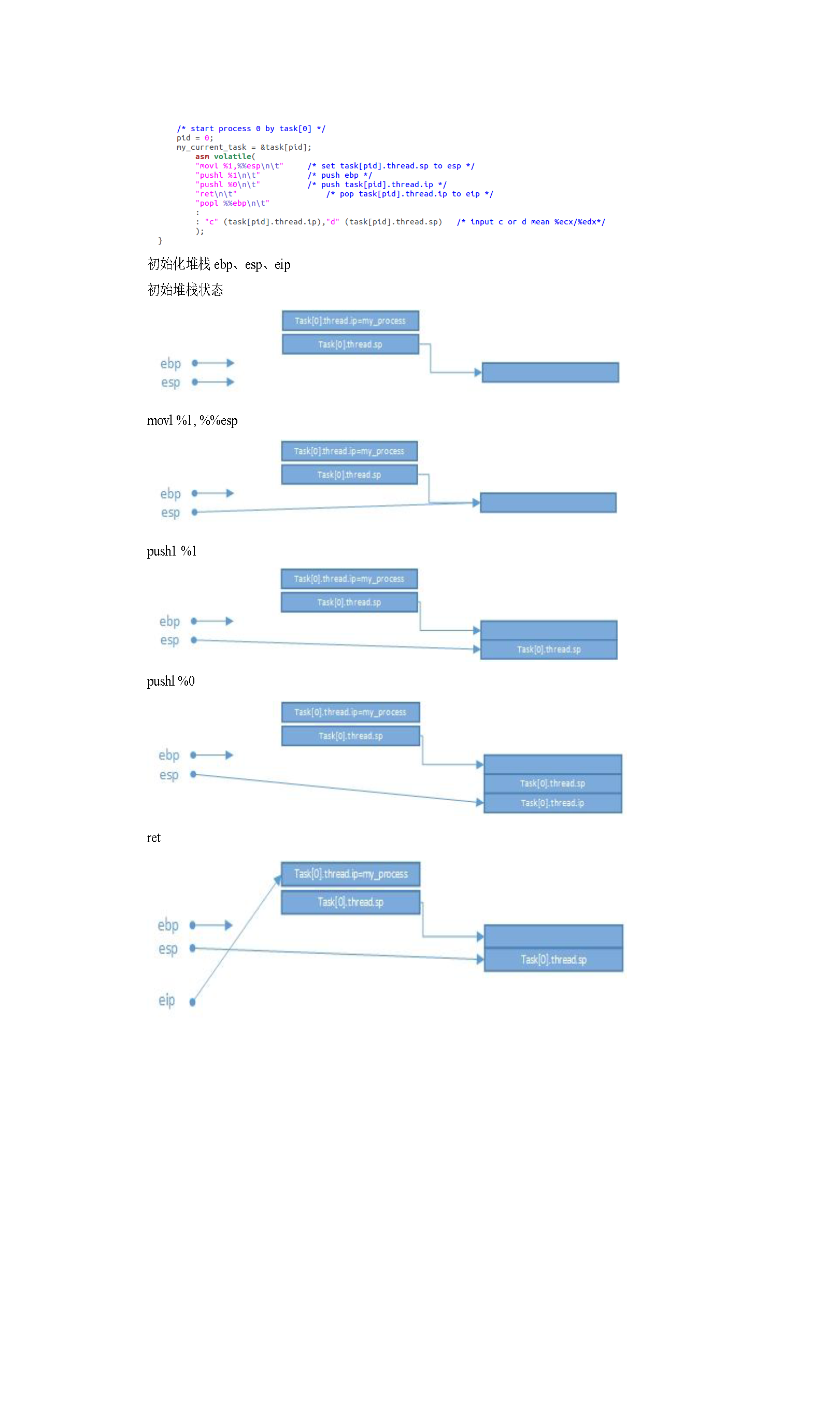
/* start process 0 by task[0] */
pid = 0;
my_current_task = &task[pid];
asm volatile(
"movl%1,%%esp\n\t" /* settask[pid].thread.sp to esp */
"pushl%1\n\t" /* push ebp */
"pushl%0\n\t" /* push task[pid].thread.ip */
"ret\n\t" /* pop task[pid].thread.ip to eip*/
"popl%%ebp\n\t"
:
:"c" (task[pid].thread.ip),"d" (task[pid].thread.sp) /* input c or d mean %ecx/%edx*/
);
}
voidmy_process(void)
{
int i = 0;
while(1)
{
i++;
if(i%10000000 == 0)
{
printk(KERN_NOTICE "this isprocess %d -\n",my_current_task->pid);
if(my_need_sched == 1)
{
my_need_sched = 0;
my_schedule();
}
printk(KERN_NOTICE"this is process %d +\n",my_current_task->pid);
}
}
}
3、myinterrupt.c
#include<linux/types.h>
#include<linux/string.h>
#include<linux/ctype.h>
#include<linux/tty.h>
#include<linux/vmalloc.h>
#include"mypcb.h"
externtPCB task[MAX_TASK_NUM];
externtPCB * my_current_task;
externvolatile int my_need_sched;
volatileint time_count = 0;
/*
* Called by timer interrupt.
* it runs in the name of current runningprocess,
* so it use kernel stack of current runningprocess
*/
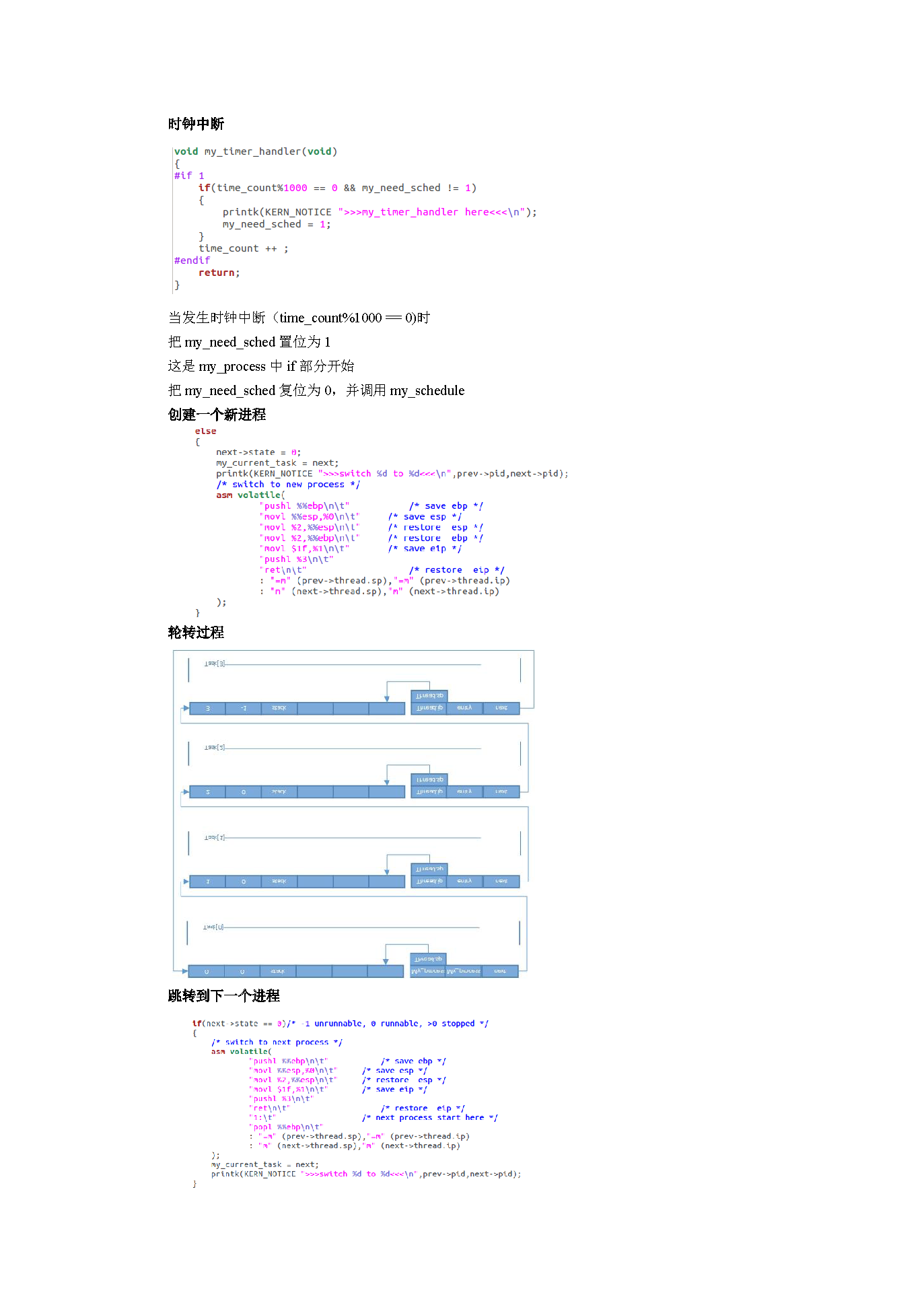
voidmy_timer_handler(void)
{
#if 1
if(time_count%1000 == 0 &&my_need_sched != 1)
{
printk(KERN_NOTICE">>>my_timer_handler here<<<\n");
my_need_sched = 1;
}
time_count ++ ;
#endif
return;
}
voidmy_schedule(void)
{
tPCB * next;
tPCB * prev;
if(my_current_task == NULL
|| my_current_task->next == NULL)
{
return;
}
printk(KERN_NOTICE">>>my_schedule<<<\n");
/* schedule */
next = my_current_task->next;
prev = my_current_task;
if(next->state == 0)/* -1 unrunnable, 0runnable, >0 stopped */
{
/*switch to next process */
asmvolatile(
"pushl%%ebp\n\t" /* save ebp */
"movl%%esp,%0\n\t" /* save esp */
"movl%2,%%esp\n\t" /* restore esp */
"movl$1f,%1\n\t" /* save eip */
"pushl%3\n\t"
"ret\n\t" /* restore eip */
"1:\t" /* next process start here */
"popl%%ebp\n\t"
:"=m" (prev->thread.sp),"=m" (prev->thread.ip)
:"m" (next->thread.sp),"m" (next->thread.ip)
);
my_current_task= next;
printk(KERN_NOTICE">>>switch %d to%d<<<\n",prev->pid,next->pid);
}
else
{
next->state = 0;
my_current_task = next;
printk(KERN_NOTICE">>>switch %d to%d<<<\n",prev->pid,next->pid);
/*switch to new process */
asmvolatile(
"pushl%%ebp\n\t" /* save ebp */
"movl%%esp,%0\n\t" /* save esp */
"movl%2,%%esp\n\t" /* restore esp */
"movl%2,%%ebp\n\t" /* restore ebp */
"movl$1f,%1\n\t" /* save eip */
"pushl%3\n\t"
"ret\n\t" /* restore eip */
:"=m" (prev->thread.sp),"=m" (prev->thread.ip)
:"m" (next->thread.sp),"m" (next->thread.ip)
);
}
return;
}
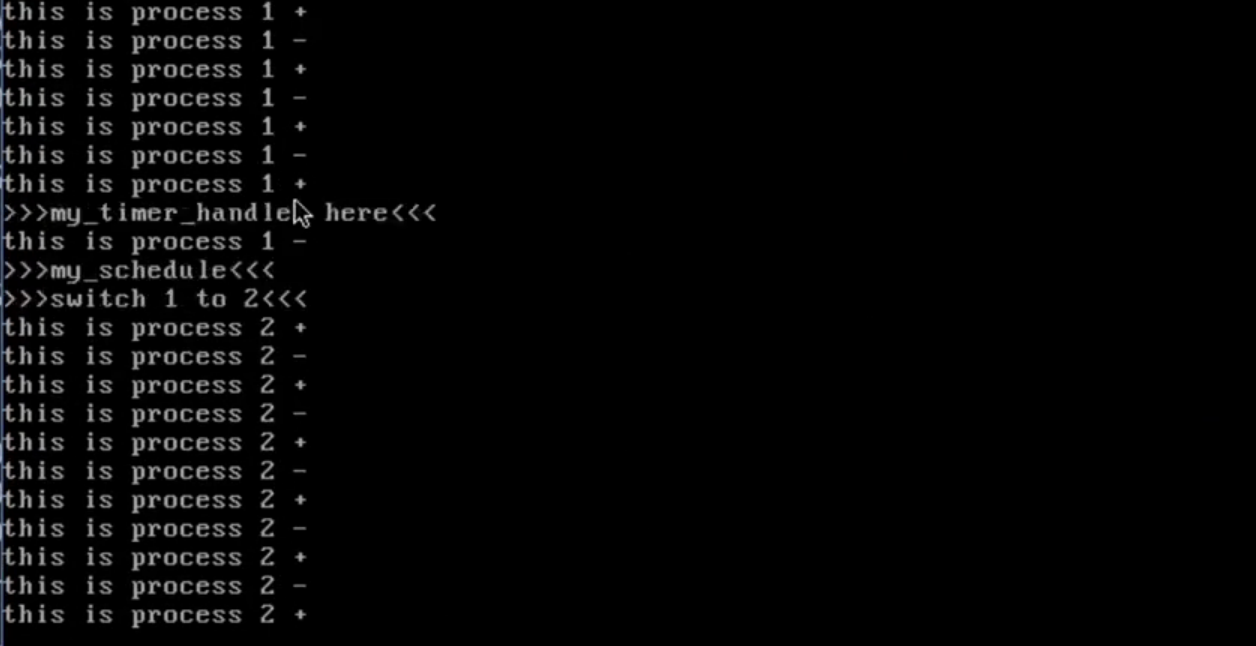
4、编译以上代码:
gcc–c 文件名.c 生成目标文件后
cdLinuxKernel/linux-3.9.4
qemu-kernel arch/x86/boot/bzImage















 2073
2073

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









