







 本文深入探讨主动降噪开发中的次级路径辨识、滤波器阶数选择以及多通道算法的应用。通过白噪声激励、LMS算法识别传递函数,并对比不同滤波器阶数的影响。针对窄带噪声,介绍了陷波滤波器和多通道算法的实现,最终展示在发动机噪声控制中的效果,降低声压级。
本文深入探讨主动降噪开发中的次级路径辨识、滤波器阶数选择以及多通道算法的应用。通过白噪声激励、LMS算法识别传递函数,并对比不同滤波器阶数的影响。针对窄带噪声,介绍了陷波滤波器和多通道算法的实现,最终展示在发动机噪声控制中的效果,降低声压级。
前言
噪声主动控制在实际应用的过程中其实存在很多的问题,比如说次级路径辨识时激励源噪声选择问题,滤波器阶数等诸多问题的选择和优化。
一、次级路径的辨识
在主动降噪开发之一中并未考虑次级次级路径的问题,但在实际中,扬声器到麦克风之间是存在一定的距离,扬声器到我们耳朵之间也存在一定的距离,那么声音在传播的过程中就会存在一定的衰减。
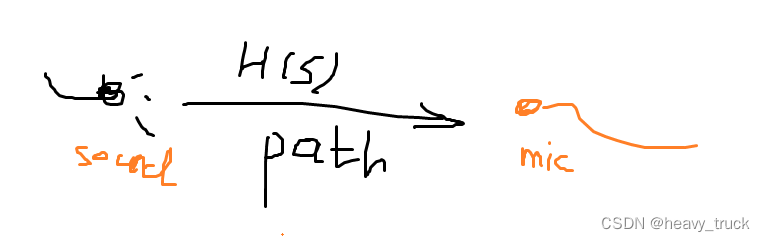 假设,传递路径上的传递函数为h(t),那么在扬声器输出的信号f(t)和mic接收到的信号g(t)就存在以下关系:
假设,传递路径上的传递函数为h(t),那么在扬声器输出的信号f(t)和mic接收到的信号g(t)就存在以下关系:
g(t) = f(t)*h(t)
两者为卷积的关系,表现在频域上就是相乘。那么问题来了,怎么获得g(t)??,其准确性对后续噪声的控制影响极大。目前存在三种激励方式,分别为白噪声,线性正弦扫频和指数正弦扫频,白噪声自不用说,后两者对应的频谱如下:
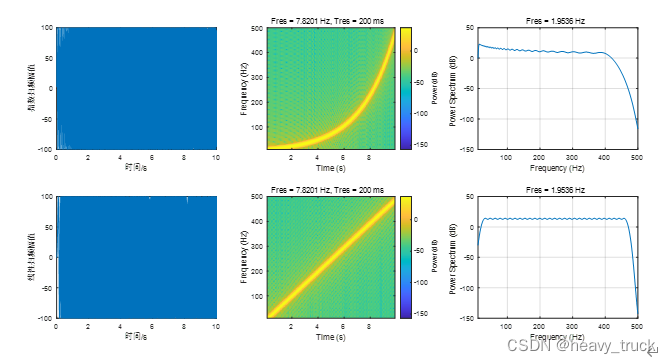 实际上,根据人耳朵的声学特性,更符合指数正弦臊扫频,但在实际应用中会根据实际情况(扬声器频响,时间的长短,降噪频带范围等)进行选择,一般来说,白噪声的频谱更为丰富,所需激励时间也较短,得到的响应也含有较为丰富发频谱特性,应用较广。
实际上,根据人耳朵的声学特性,更符合指数正弦臊扫频,但在实际应用中会根据实际情况(扬声器频响,时间的长短,降噪频带范围等)进行选择,一般来说,白噪声的频谱更为丰富,所需激励时间也较短,得到的响应也含有较为丰富发频谱特性,应用较广。
部分代码如下:
%% 线性扫频
t1 = 1/fs:1/fs:t0;
y2 = chirp(t,0,10,500,'quadratic'); % 自带程序生成的扫频;
beta = (endFre-startFre)/t0;
y1 = A*sin(2*pi*(0.5*beta*t1.^2+startFre*t1));
subplot(131)
plot(t1,y1)
xlabel('时间/s')
ylabel('线性扫频幅值')
subplot(132)
pspectrum(y1,fs,'spectrogram','FrequencyLimits',[10 1000],'TimeResolution',0.2, ...
'OverlapPercent',99,'Leakage',0.85)
subplot(133)
pspectrum(y1,fs,'FrequencyLimits',[10 1000])
二、滤波器阶数的选择
根据激励得出的响应,计算出对应的传递函数,这其实有两种方法,第一,分别计算对应的频谱特性,然后再逆傅里叶变化,第二,就是采样LMS算法进行辨识,这是最简单和最方便的,效率最高的一种方法,这两种方法辨识的结果如下:
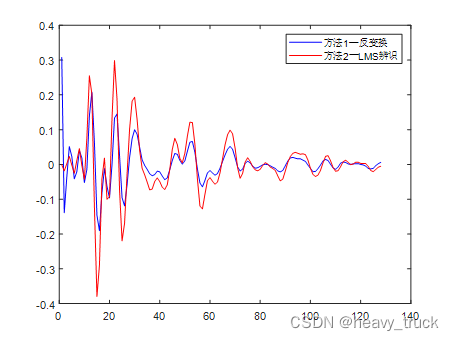 可见,其前128阶趋势基本一致,相对而言,LMS识别出的冲激响应幅值较大,而反变换则在0处存在一个极大值,这主要是由于信号存在直流分量引起的(经过大神指导,该该处存在的极大值并不是直流分量引起,而是由极值点引起),需要在实际中进行甄别。
可见,其前128阶趋势基本一致,相对而言,LMS识别出的冲激响应幅值较大,而反变换则在0处存在一个极大值,这主要是由于信号存在直流分量引起的(经过大神指导,该该处存在的极大值并不是直流分量引起,而是由极值点引起),需要在实际中进行甄别。
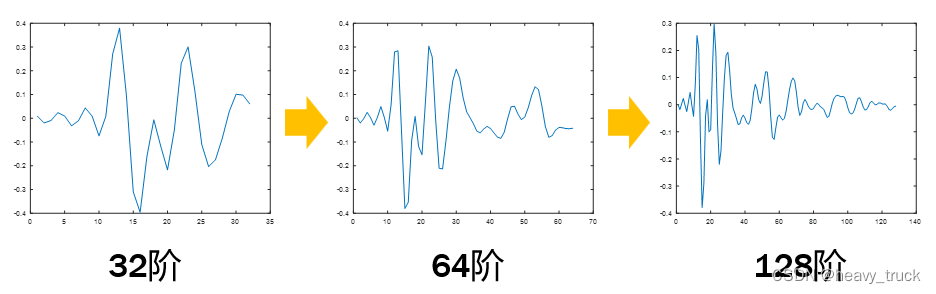
对识别出的传递函数的阶数需要进行优化,优化的前提就是根据实际硬件的承受能力,也就是算力的问题,毕竟阶数越大,延迟就会越大,DSP在计算FIR滤波器时需要的时间就越长,功耗也很大。不同滤波器阶数的比较:
部分代码:
% 初始化参数
en = zeros(itr,1); % 误差序列,en(k)表示第k次迭代时预期输出与实际输入的误差
W = zeros(M,itr); % 每一行代表一个加权参量,每一列代表-次迭代,初始为0
% 迭代计算
for k = M:itr % 第k次迭代,保证输入延迟后的信号有效,只有iter-M次迭代;
x = xn(k:-1:k-M+1); % 将输入信号延迟,使得滤波器的每个抽头都有输入
y = W(:,k-1).' * x; % 滤波器的输出
en(k) = dn(k) - y ; % 第k次迭代的误差
% 滤波器权值计算的迭代式
W(:,k) =0.9* W(:,k-1) - 2*mu*en(k)*x ; % 滤波器系数更新向量,0.9的系数可以防止泄露;
end
三、多通道算法
3.1、陷波滤波器
为什么会提到这滤波器???,主要是因为噪声主动控制,特别是对于发动机噪声主动控制技术,主要应用的是窄带技术,简单来说就是对单个频率进行控制,那么陷波滤波器对应的频响为:
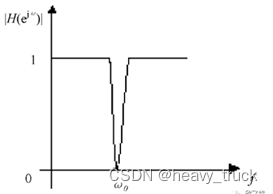
对应的特性在点击这里讲的更清楚。
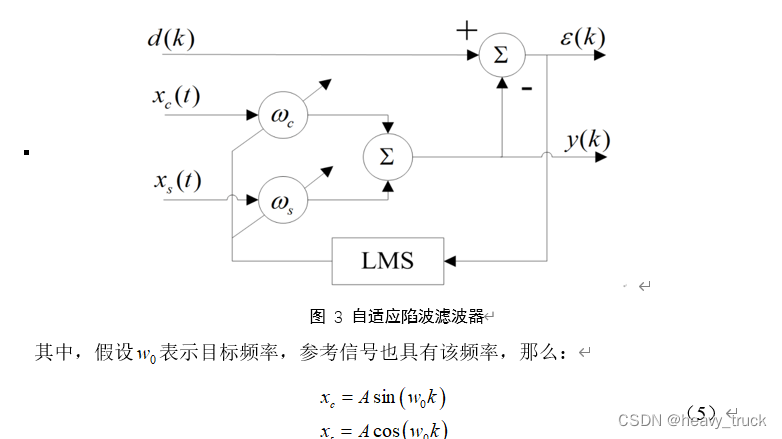
那么,既然是对单个频率进行处理,我们应该怎么模拟这个信号呢,那肯定是正余弦信号,我们都知道任何信号都是有正余弦信号叠加而成,只要能够叠加出对应的频率就可以。
3.2、多通道算法
解决上述问题之后,已经完成80%,剩下的只剩20%了,现实告诉我们,任何事都存在二八分成,而这个“二”是占比最大的,那当然是最重要的了,多通道算法一般采用下面的框图:
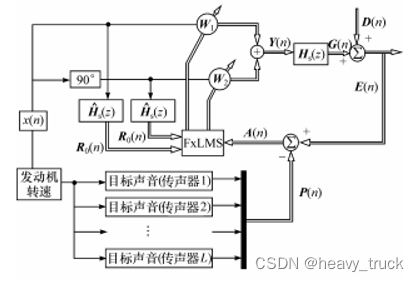 说简单,其实也简单,就是把向量数据转换为矩阵数据而已。那么对于发动机噪声,对应的结果为:
说简单,其实也简单,就是把向量数据转换为矩阵数据而已。那么对于发动机噪声,对应的结果为:
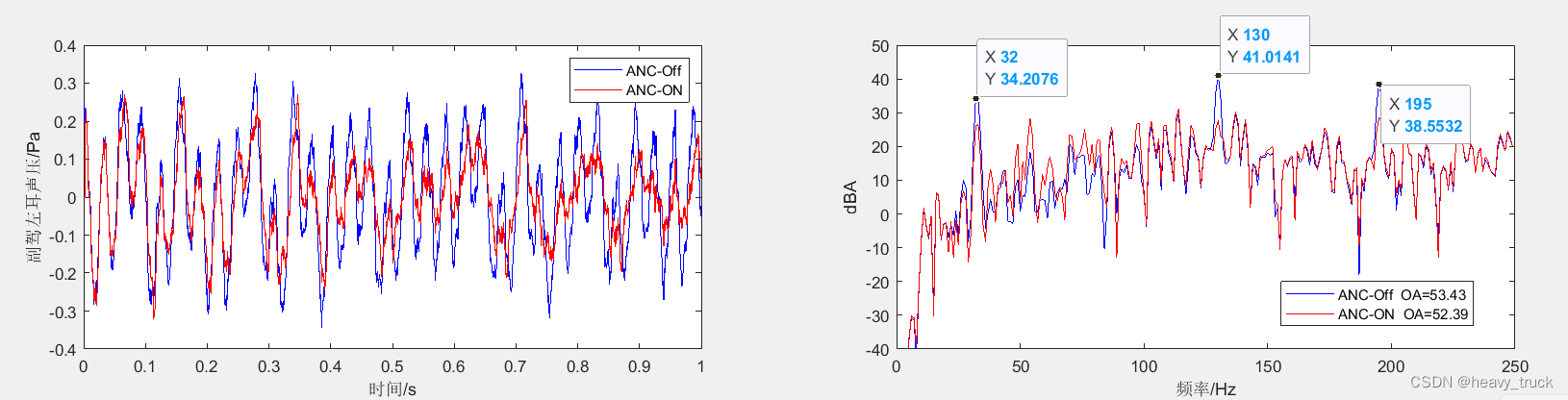 所控制的30Hz,130Hz和195Hz都实现了峰值降低的目的,总声压OA由53.43dB降到52.39dB。
所控制的30Hz,130Hz和195Hz都实现了峰值降低的目的,总声压OA由53.43dB降到52.39dB。
部分代码如下:
clc
clear
close all
opengl software
% load Sn.mat
load DsIdle.mat % 第一个通道;
load PsIdle.mat % 第二个通道; 通道的个数可以根据实际情况(需要降噪的个数进行添加)进行添加。
load IRF_GLOBAL_1.mat
%%
% Signal = Idle(1:end,2);
t = DsIdle(1:40960,1);
Sn1 = IRFGlobal(1:128)'; % 主驾传递函数,存在4个扬声器
Sn2 = IRFGlobal(129:256)';
Sn3 = IRFGlobal(257:384)';
Sn4 = IRFGlobal(385:512)';
Ps1 = IRFGlobal(513:640)'; % 副驾传递函数,存在4个扬声器;
Ps2 = IRFGlobal(641:768)';
Ps3 = IRFGlobal(769:896)';
Ps4 = IRFGlobal(897:1024)';
fs = 40960;
f1 = 32.5; % 目标频率1;
f2 = 130; % 目标频率2;
f3 = 195; % 目标频率3;
mu1 = 0.005; % 通过调节这些参数可以优化降噪后的效果;
mu2 = 0.00082; % 分别对应不同的阶次收敛步长;
mu3 = 0.00081;% 可以根据实际情况进行调整;
M = 128; % 滤波器阶数;
% t = 0:1/fs:11;
x1 = sin(2*pi*f1*t);
x2 = sin(2*pi*f2*t);
x3 = sin(2*pi*f3*t);
总结
由于这是一个综合多学科问题,噪声主动控制技术在实际的应用中不仅存在上述问题,最主要还有硬件性能的问题,包括扬声器频响,DSP芯片算力问题,AD、DA 转换问题。


















 8108
8108

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











