









自动驾驶或3D检测的两种方案:
1、基于激光雷达的点云数据目标检测,准确率高但是成本高
2、基于视觉的 3D 目标检测,如单目 3D 目标检测研究较多
自动驾驶数据集
KITTI:由德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合创办,是目前国际上最大的自动驾驶场景下的计算机视觉算法评测数据集。2个灰度摄像机,2个彩色摄像机,一个Velodyne 64线的360度3D激光雷达,4个光学镜头,以及1个GPS导航系统
nuscene:一共配备了6个相机、一个LiDAR、5个RADAR
3D点云数据
点云数据(point cloud data)是指在一个三维坐标系统中的一组向量的集合。
扫描资料以点的形式记录,每一个点包含有三维坐标,有些可能含有颜色信息(RGB)或反射强度信息(Intensity)
数据的格式,就是(x,y,z)*n
点云数据格式介绍1
点云数据格式的可视化
点云数据是3D激光雷达扫描仪的基本输出。这通用的点云数据文件形式是3D坐标文件(经常指一个xyz文件)。这些文件是ASCII,因此可以被所有的后处理软件读取。这些像素在一个3D灰度文件里面是如下形式
灰度像素点云数据:X1, Y1, Z1,灰度值1; X2, Y2, Z2,灰度值2
同样的,这些像素在一个rgb文件里面是如下形式
彩色点云数据:X1, Y1, Z1, r1, g1, b1;X2 , Y2, Z2, r2, g2, b2
图像于点云坐标
图像的坐标轴和点云的坐标轴是不同的,下图显示了蓝色的图像轴和橙色的点云轴
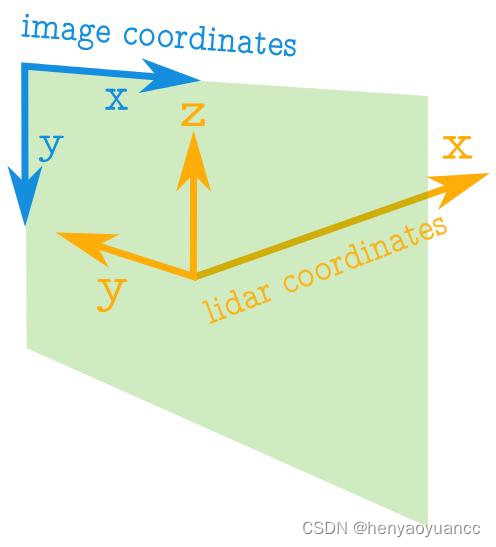
关于图像坐标轴:
1、图像中的坐标值总是正的。
2、原点位于左上角。
3、坐标是整数值。
关于点云坐标轴:
1、点云的坐标值可以是正数也可以是负数。
2、坐标是实数。
3、正X轴代表前方。
4、正Y轴代表左边。
5、正Z轴代表上方
点云转换为鸟瞰图
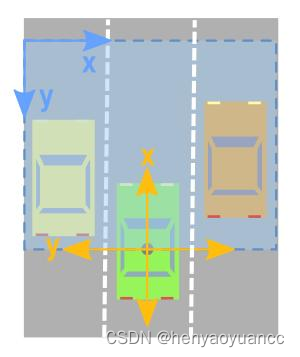
如上图,鸟瞰图中的点云的相关轴为X和Y轴。同时,要考虑以下几点:
1、X和Y轴意味着是相反的
2、X和Y轴指向相反方向的
3、将点云的数值转换到图像上,使得(0, 0)是图像中最小的值。
转换完成的鸟瞰图只有一个通道,即每个位置的高度?
过程及代码详解:添加链接描述
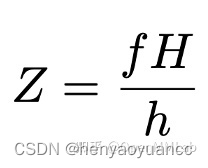
RGBD
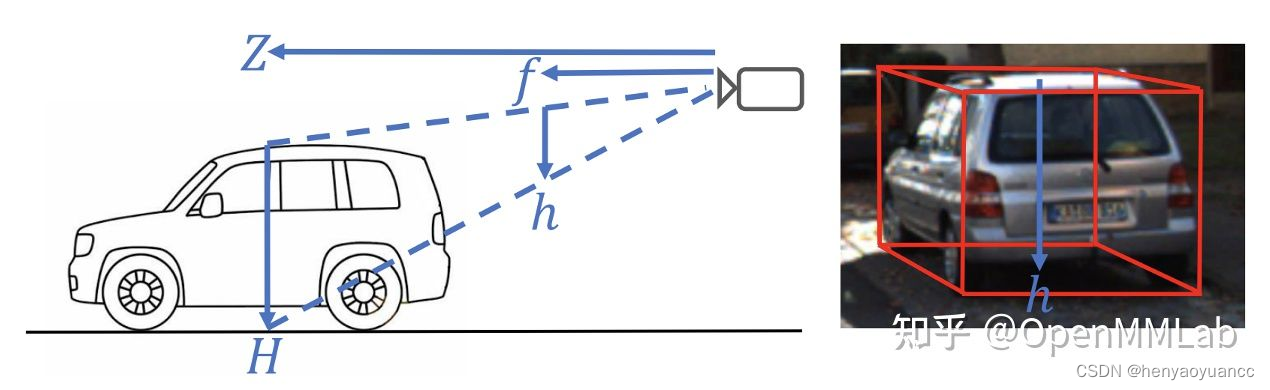
从上图我们可以看到物体的深度 Z、相机的焦距 f、物体的实际高度 H 和物体在图像平面上投影的 h 之间由几何相似性可以得出一个几何投影模型
3D点云目标检测
待补充
一文览尽基于激光雷达点云(lidar)的目标检测方法
单目3D检测
centerNet3D Fcos3D
相机的内参外参
salm或自动驾驶中,已知物体在图像中的像素坐标,要求出该物体在实际空间中的的物理坐标。转换过程如下:
像素坐标->图像坐标->相机坐标->世界坐标
上面三个箭头表示转换三次,就是三个矩阵,前两个转换都是相机内部的事情,可以合并成一个叫相机内参,最后一个相机坐标到世界坐标的转换矩阵是外参
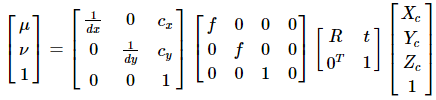
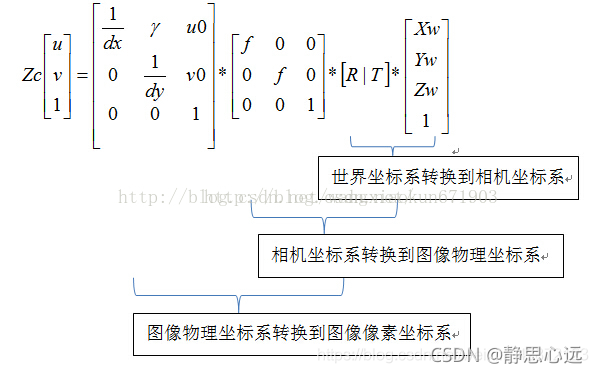
实际操作中,比如自动驾驶,世界坐标以车辆后轴中心为坐标原点,此时可以把Zw设成0,那么外参矩阵T退化成了3乘3矩阵,这样就可以与内参矩阵K合成一个K*T=P,代码中,只要经过一次矩阵转换(P或P逆)就可以完成二者之间的坐标转换了。
原理介绍,没太看懂
外参是相机坐标系转到世界坐标系的参数,其实相机坐标系也是一种世界坐标系了,就是原点位置以及xyz三个轴的方向,不是我们实际想要的,所以转换到世界坐标系(比如车辆后轴为原点),所以这个转换仅需要一个旋转和平移就行了,没有缩放!因此外参就是R(旋转矩阵 3乘3)和T(平移矩阵 3乘1)组成的矩阵
旋转矩阵
旋转矩阵、欧拉角、四元数(实际使用较多),参考如下,待整理,学习下挺好,更有助于理解矩阵相乘的意义
https://zhuanlan.zhihu.com/p/75076326
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









