






基于mpc的换道五次多项式换道 simulink和carsim联合仿真 有详细的说明文档
ID:9910714496093178
车辆工程控制指导
基于MPC的换道五次多项式换道Simulink和CarSim联合仿真是一个广泛应用于自动驾驶系统的技术。本文将从理论和仿真实验的角度探讨这一技术的原理和应用。
在自动驾驶技术的发展过程中,换道是一个核心的功能之一。通过换道,自动驾驶系统可以在不干扰其他车辆的情况下完成车辆位置的调整,从而实现更加安全和高效的交通。
在本文中,我们将首先介绍基于MPC的控制方法。MPC(Model Predictive Control)是一种基于模型预测的控制方法,在自动驾驶系统中得到了广泛的应用。与传统的PID控制相比,MPC能够更好地考虑到系统的非线性和时变性,并且具有更好的鲁棒性和性能。
接下来,我们将详细介绍五次多项式换道算法。五次多项式是一种常用的曲线拟合方法,在自动驾驶系统中可以用来描述车辆的轨迹。我们将阐述该算法的原理和优势,并且通过Simulink和CarSim联合仿真来验证其效果。
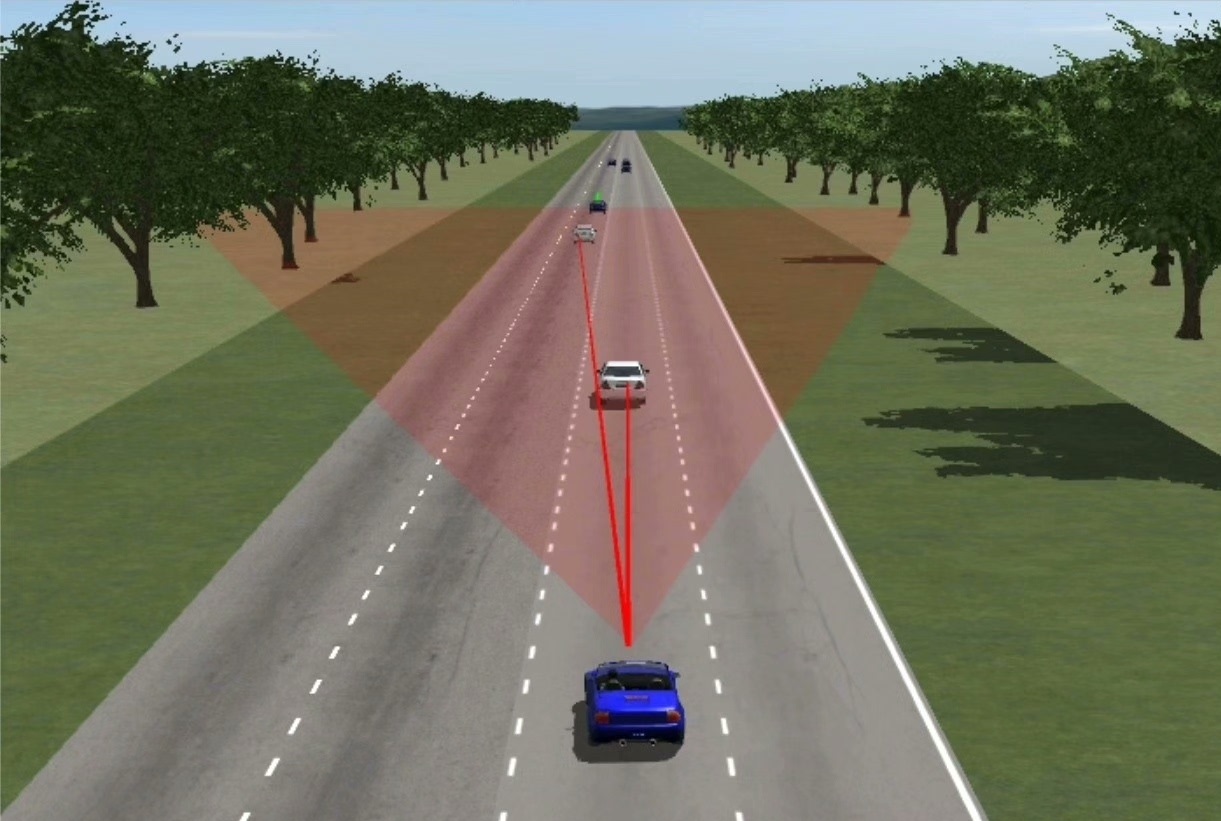
Simulink和CarSim是两种常用的仿真工具。Simulink是MATLAB的一个重要模块,提供了丰富的功能和工具,可以用于构建和仿真各种控制系统。CarSim是一款专门用于汽车动力学仿真的软件,可以模拟车辆在不同道路场景下的动力学行为。
我们将结合Simulink和CarSim,在仿真环境中搭建一个完整的自动驾驶系统,并使用基于MPC的五次多项式换道算法来进行测试和验证。通过对比不同参数和场景下的仿真结果,我们将分析该算法在换道过程中的性能和稳定性。
最后,我们将总结本文的研究内容,并展望基于MPC的五次多项式换道算法在实际自动驾驶系统中的应用前景。我们将强调该算法的优势和适用性,并提出一些建议和思考,以促进自动驾驶技术的进一步发展和应用。
总之,基于MPC的换道五次多项式换道Simulink和CarSim联合仿真是一个具有重要实际意义和应用价值的技术。本文通过理论分析和仿真实验,对该技术进行了深入探讨,并展示了其在自动驾驶系统中的应用前景。希望本文能够对读者们在研究和开发自动驾驶技术方面提供一定的参考和启发。
【相关代码,程序地址】:http://fansik.cn/714496093178.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









