









 本文探讨了图计算在大数据分析中的关键作用,包括图挖掘算法、图应用、子图匹配、稠密子图挖掘及图相似度计算。介绍了Apriori算法在关联规则挖掘中的应用,以及基于图的方法优化集合求交和图流数据总结的技术。
本文探讨了图计算在大数据分析中的关键作用,包括图挖掘算法、图应用、子图匹配、稠密子图挖掘及图相似度计算。介绍了Apriori算法在关联规则挖掘中的应用,以及基于图的方法优化集合求交和图流数据总结的技术。
万物皆关联。作为表达和处理关联关系的最佳方式,图和图计算已经成为人们的关注重点和研究热点,广泛应用于金融分析、社交分析、智慧交通等诸多领域。作为大数据处理的一种典型模式,图计算不仅对计算机体系结构提出了严峻的挑战,也对系统软件、数据管理和处理模式提出了重大挑战。11.17-18有幸在武汉参加了CCF组织的ADL97《图计算》讲座,一共7位学术界和工业界的著名学者围绕大图处理的系统架构、表达存储方式,分布式计算、优化算法等方面进行了深入的讲解,两天的讲习班就像上课一样,干活满满。因为本人主要感兴趣在图挖掘算法和图应用,因此这篇博客将就讲习班的部分内容进行整理。
一、Towards Big Graph Processing: Applications, Challenges, and Advances (林学民)
1、图成为日益重要的运算对象
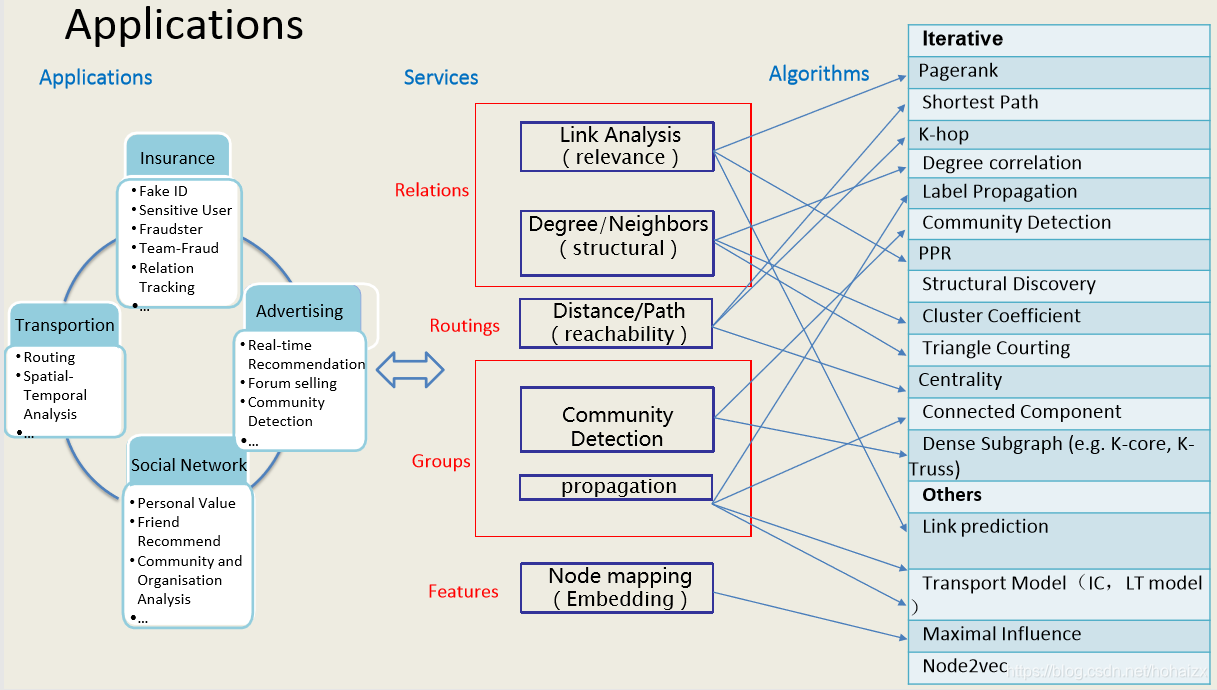
图结构是对群体关系的一种抽象,可以描述丰富的对象/实体和关系。图结构中,节点表示对象/实体,节点之间的边表示对象/实体之间的关系。例如:社交网络中,节点表示用户,用户之间建立的关系表示为边;学术文献中,每篇论文可以看作节点,论文的引用关系看作边;互联网上,一个个web页面代表节点,页面之间的超链接关系代表边……将现实生活中的对象/实体及其关系抽象为图数据,可以探究很多有趣的问题,如:节点权威/中心度量,社区发现,消息传播……进而指导各种应用,如利用PageRank算法计算网页权重,作为搜索排序的参考;利用最短路径算法做好友推荐;利用最小连通图识别虚假交易、洗钱等。
然后林老师重点讲解了三类图挖掘算法——子图匹配,稠密子图挖掘,图相似度计算。
2、子图匹配
定义:
给定一个查询图
q
q
q和一个数据图
G
G
G,找出
G
G
G中所有与
q
q
q同构的子图。数据图
G
G
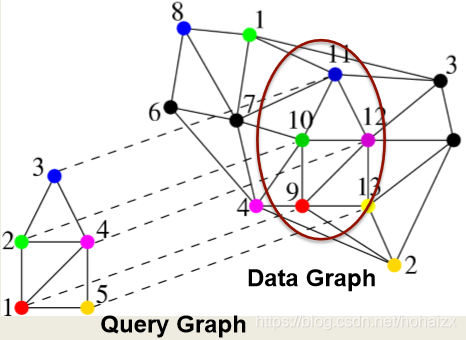
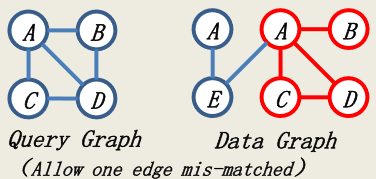
G可以是一个很大的图,也可以是多个中等大小的图,图中的顶点/边可以带标签也可以不带标签。子图匹配可以分为精确匹配和近似匹配,近似匹配允许一定数目没有匹配的边(mis-matched)。
应用
图分类,化合物搜索,异常检测
挑战
子图同构是一个NP难问题,搜寻结果可能非常大(MB-scale的图可以产生PB-scale的结果)。
提出的算法
①精确匹配
Tree Sequence(QuickSI),VLDB08
Core-Forest-Leaf Decomposition(CFL Algorithm),SIGMOD16
Optimal Join-based algorithm,VLDB15、VLDB17
②近似匹配
Spanning-tree-based matching algorithm(TreeSpan),SIGMOD12
3、稠密子图
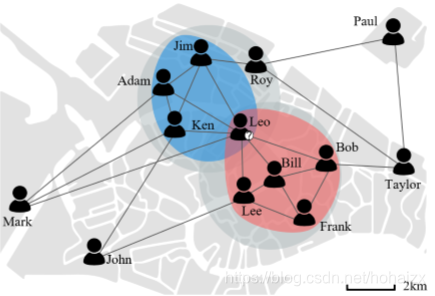
稠密子图是指图中相互连接比较紧密的顶点和边的集合,稠密子图通常蕴含了有趣的社会现象,对稠密子图的定义通常有如下一些指标:
k-Core: 图G的子图,其中每个节点的度都不小于k。
k-Truss: 图G的子图,其中任意一条边都被(k-2)个三角形利用。k-Truss可以看作是k-Core的加强版,k-Core只强调子图中每个顶点都至少与其他k个顶点相连,但k-Truss强调图中任意两点顶点都至少与其他k-2个顶点相连,也就是每两个顶点都至少有k-2个公共朋友。三角形是一种最简单紧密关系,图中任意两个顶点之间都有边相连,即两两都是朋友,因此这个关系很紧密。
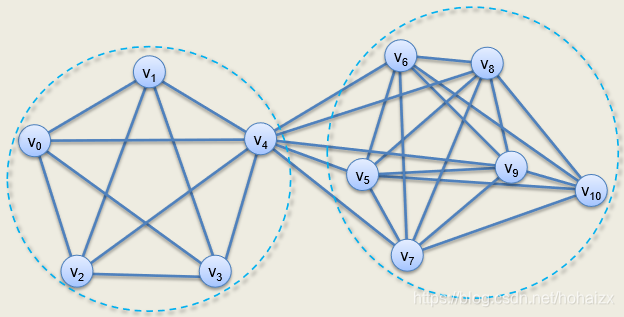
k-Edge Connected: 图G的子图,如果删除其中任意k-1条边,其仍然是连通的。
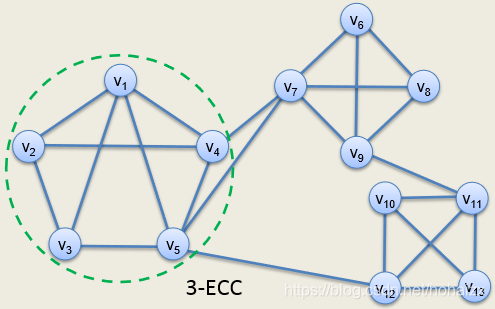
k-Vertex Connected: 图G的子图,如果删除其中任意k-1个顶点,其仍然是连通的。
Cliques: 图G的子图,其中所有顶点两两相连。
4、图相似度计算
edit-distance: 与字符串的编辑距离类似,图的编辑是对边、节点定义编辑操作:插入、删除、替换,图
r
r
r与图
s
s
s的编辑距离定义为:将
r
r
r转换成
s
s
s所需的最小编辑操作。
SimRank: 其思想是两个顶点的入邻节点很相似,那么这两个顶点也很相似。
s
(
a
,
b
)
=
C
∣
I
(
a
)
∣
∣
I
(
b
)
∣
∑
i
=
1
∣
I
(
a
)
∣
∑
j
=
1
∣
I
(
b
)
∣
s
(
I
i
(
a
)
,
I
j
(
b
)
)
s(a,b)=\frac{C}{|I(a)||I(b)|}\sum_{i=1}^{|I(a)|}\sum_{j=1}^{|I(b)|}s(I_i(a),I_j(b))
s(a,b)=∣I(a)∣∣I(b)∣Ci=1∑∣I(a)∣j=1∑∣I(b)∣s(Ii(a),Ij(b))
其中, I ( a ) I(a) I(a)、 I ( b ) I(b) I(b)分别表示顶点 a a a, b b b的入邻节点。
二、Graph Computing Techniques for AI and Big Data Applications (钟叶青)
关联规则挖掘
在关联规则挖掘中涉及频繁项集计算和规则生成两个过程,频繁项集是指数据库
D
D
D中出现频率大于支持度(support)阈值的项目集。
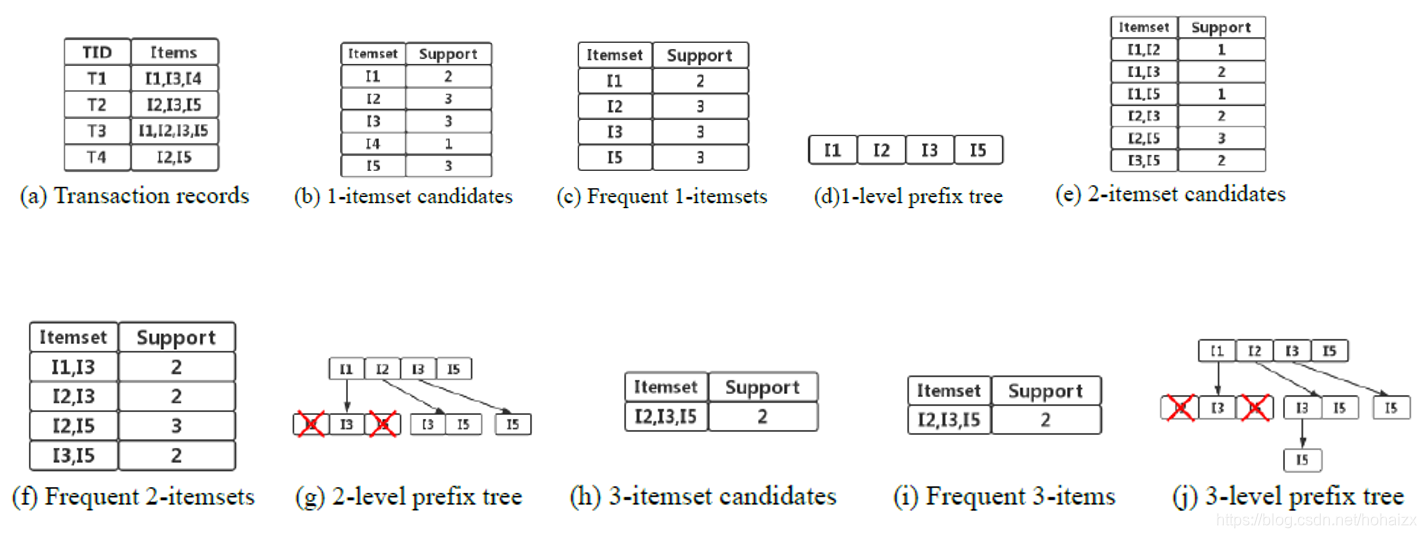
1、Apriori算法
Apriori算法是最常用的频繁项集计算算法,其思想如下:
- 候选项集和频繁项集被存储为一棵前缀树;
- 依据频繁k-1项集生成候选频繁k-项集;
- 频繁k项集的子集也是频繁的;
- 在生成候选项集后,Apriori遍历前缀树,记录每个候选项集的支持度,然后产生频繁项集。
其过程如下图:
2、基于图的方法
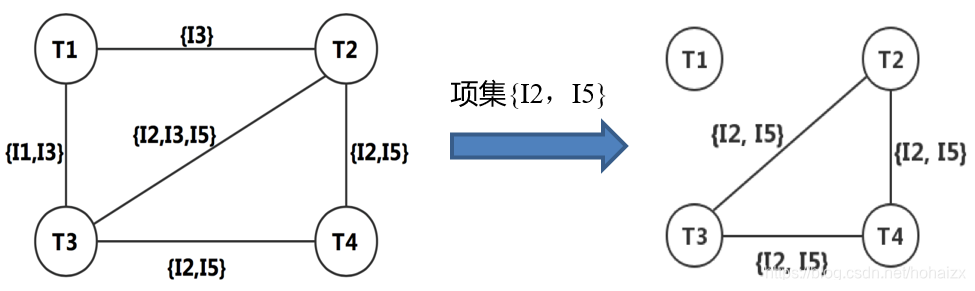
采用图计算的方法计算频繁项集,首先需要将数据库中的事务转换成图数据:
- 对于每一条事务,表示为图中的顶点;
- 如果两条事务之间有k个共同的项,那么在两条事务对应的顶点之间加入一条边,并将其属性设置为共同的k个项。
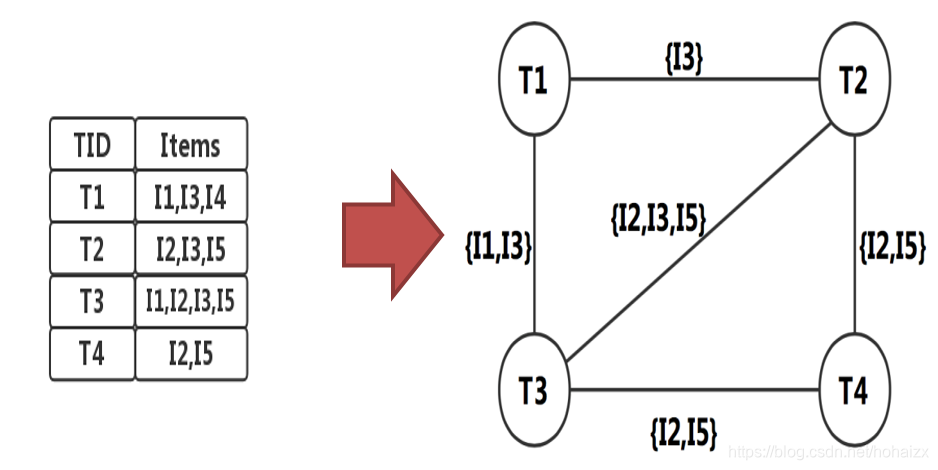
对于任意一个项集,包含该项集的顶点构成了一个连通分量,并且该连通分量中任意两个顶点之间都有一条边,因此只需要计算该连通分量包含的顶点数即可得到该项集的支持度。
当k很小时,候选项集的数目将非常的多,基于图的方法将非常耗时。而当k很大时,Apriori算法因为需要先计算所有频繁k-1项集导致性能较差,所以一个简单想法是将Apriori算法和基于图的方法结合。因此,钟老师团队提出了ANG算法—— a combination of Apriori and graph computing techniques for frequent itemsets mining。
三、Speeding Up Set Intersections in Graph Algorithms using SIMD Instructions (邹磊)
许多图算法都涉及集合求交,如:
三角形计数:

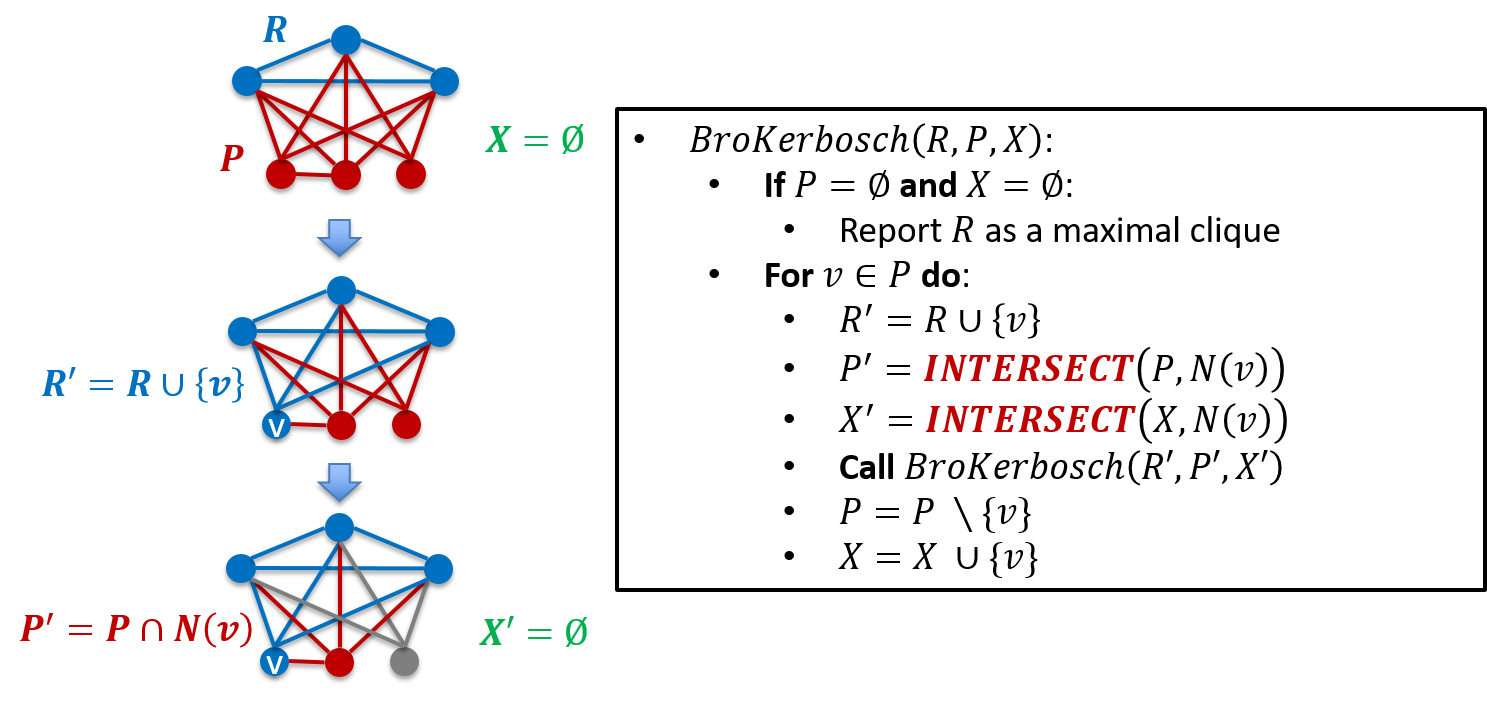
极大团
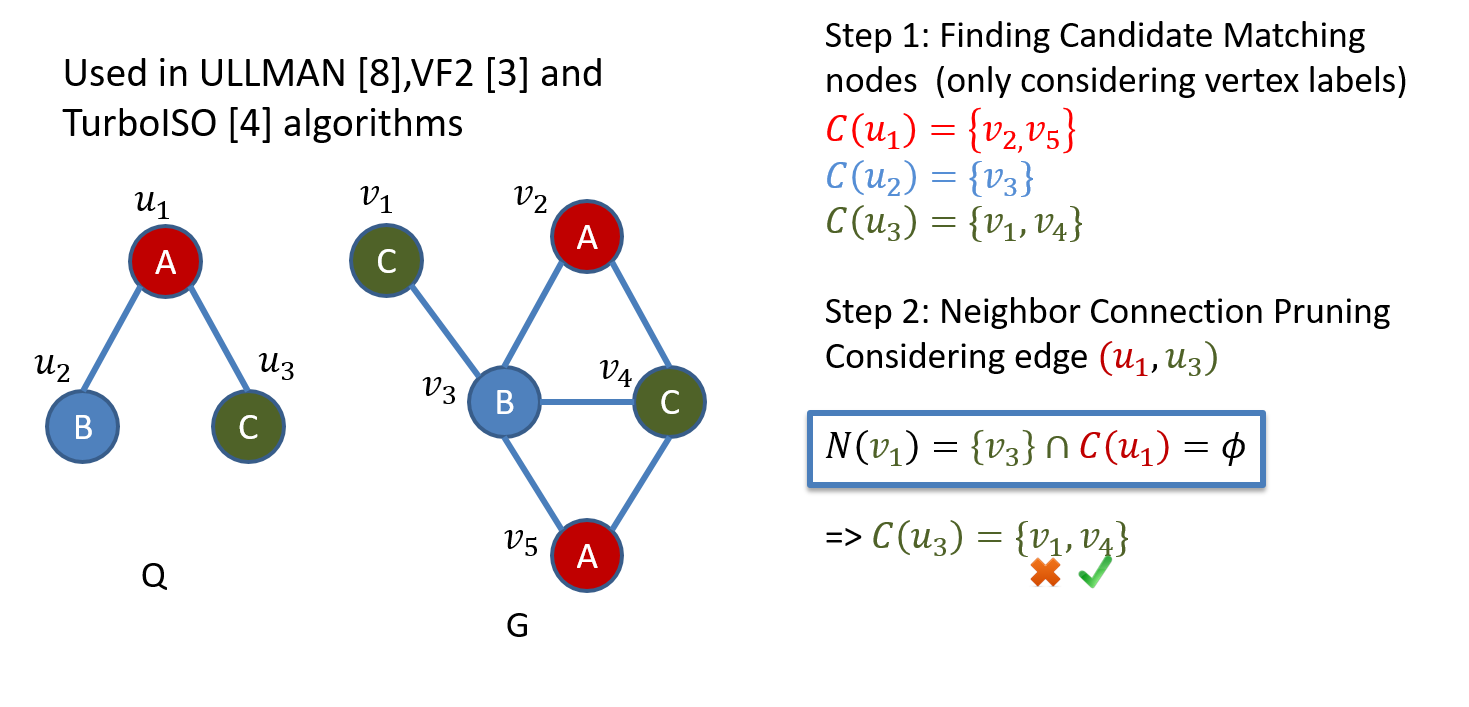
子图同构
集合求交常用思路是,首先将两个集合升序排列,然后定义两个指针,从前到后扫描两个集合,如果指针所指位置的值相等,记录该值,并同时将指针后移,如果不相等,将所指向值的指针后移。
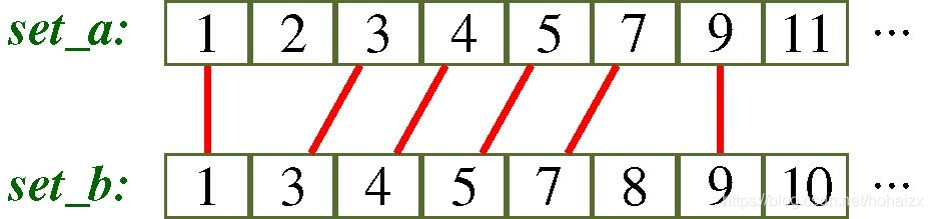
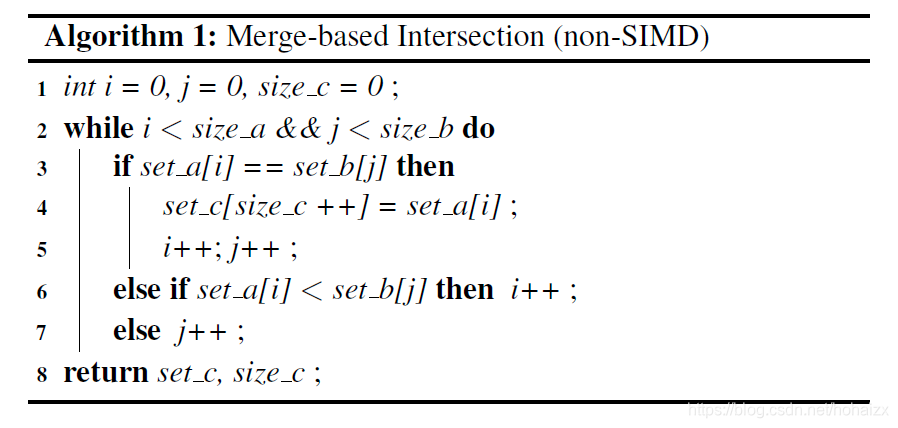
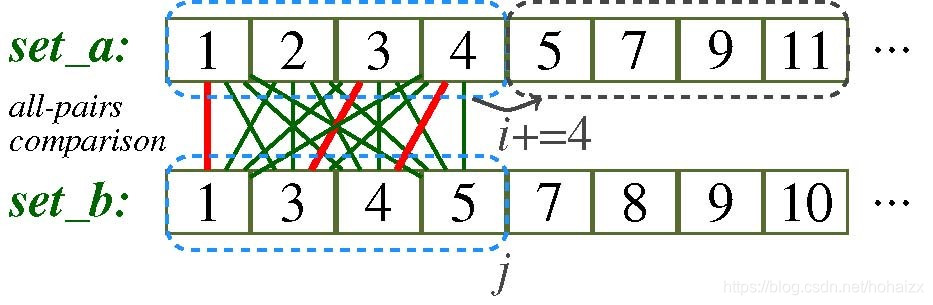
上述过程是一个复杂耗时的过程,因此目前针对集合求交都是采用的SIMD指令,SIMD:Single instruction multiple data,即一条指令处理多个数据,既一条指令能够同时并行执行在多条数据上。如下图,一条指令同时处理四条数据,能够带来4倍的加速。
但基于SIMD带来的提速更多是依赖SIMD指令带来的硬件加速,所以可以针对集合求交算法进行优化,因此,邹磊老师团队提出Base and State Representation(BSR)
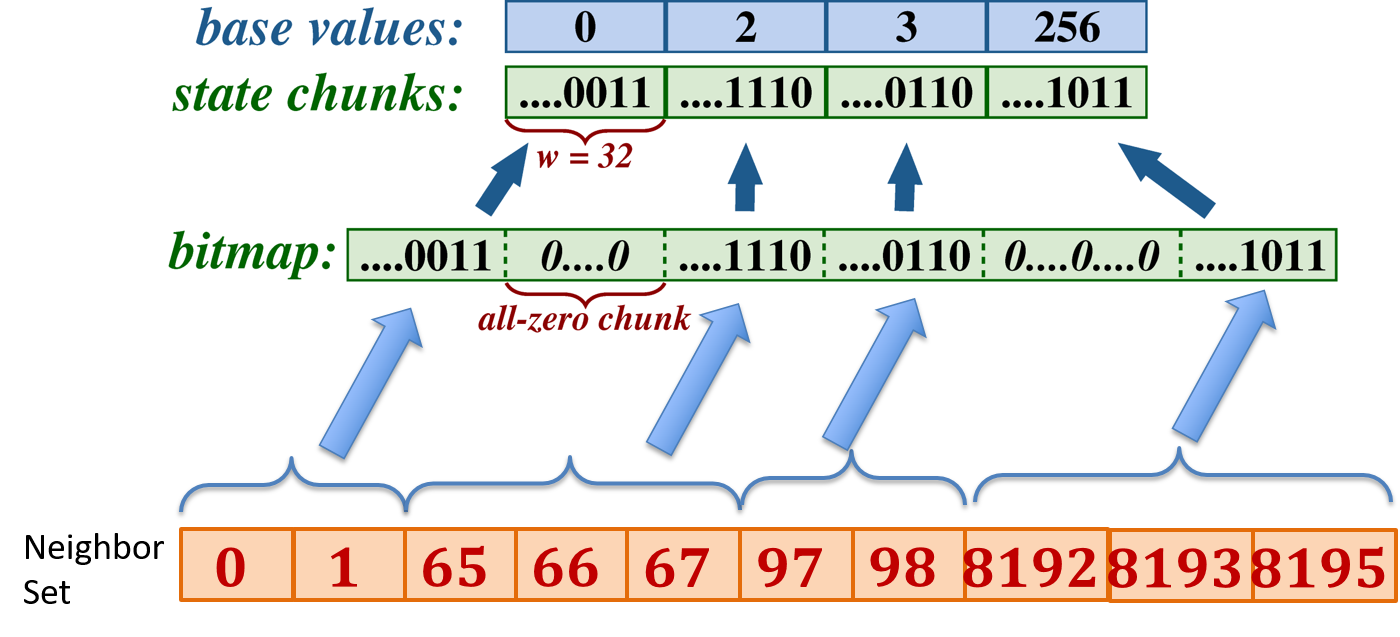
邻接列表中存储的是一个顶点的邻居节点的下标,对于图中每一个节点采用bitmap表示,每一个bit位置0/1代表该值是否出现,0代表该值没有出现,1代表该值出现过。如果一个节点的邻接节点很少,但是节点之间下标之间的间隔很大,将导致bitmap很稀疏,有很多连续为0的位置,导致两个全0的集合的无用比较。
在BSR中,将bitmap划分为大小相等的块,比如32位,然后每一块被表示成两部分,base value和state chunk,base value记录了块在bitmap中的下标,state chunk直接复制bitmap中对应位置的值,因此可以删除bitmap中全0的块。
因此,在接下来进行集合求交时首先对两个集合的base value进行比较,每次取4个base value进行匹配,过滤掉不匹配的值,然后取4个state chunk,根据base value的匹配情况进行对齐,然后比较对齐后的state chunk,得到最终结果。
在集合求交之前需要先进行节点重排序,有益于减少chunk数目。

邹磊老师定义了一个BSR压缩函数:
S
(
G
,
w
,
f
,
a
)
=
∑
v
i
∈
V
α
o
(
v
i
)
⋅
∣
N
o
~
(
v
i
)
∣
+
α
I
(
v
i
)
⋅
∣
N
I
~
(
v
i
)
∣
S(G,w,f,a)=\sum_{v_i\in V}\alpha_o(v_i)\cdot|\widetilde{N_o}(v_i)|+\alpha_I(v_i)\cdot|\widetilde{N_I}(v_i)|
S(G,w,f,a)=vi∈V∑αo(vi)⋅∣No
(vi)∣+αI(vi)⋅∣NI
(vi)∣
四、Fast and Accurate Graph Stream Summarization (邹磊)
传统的图数据结构主要是邻接矩阵和邻接列表,邻接矩阵的空间复杂度太高 O ( ∣ V ∣ 2 ) O(|V|^2) O(∣V∣2),一般不用于大规模图数据的存储,因此常用邻接链表存储图数据,但邻接链表的插入/删除操作比较复杂,因而不适合流式图数据。
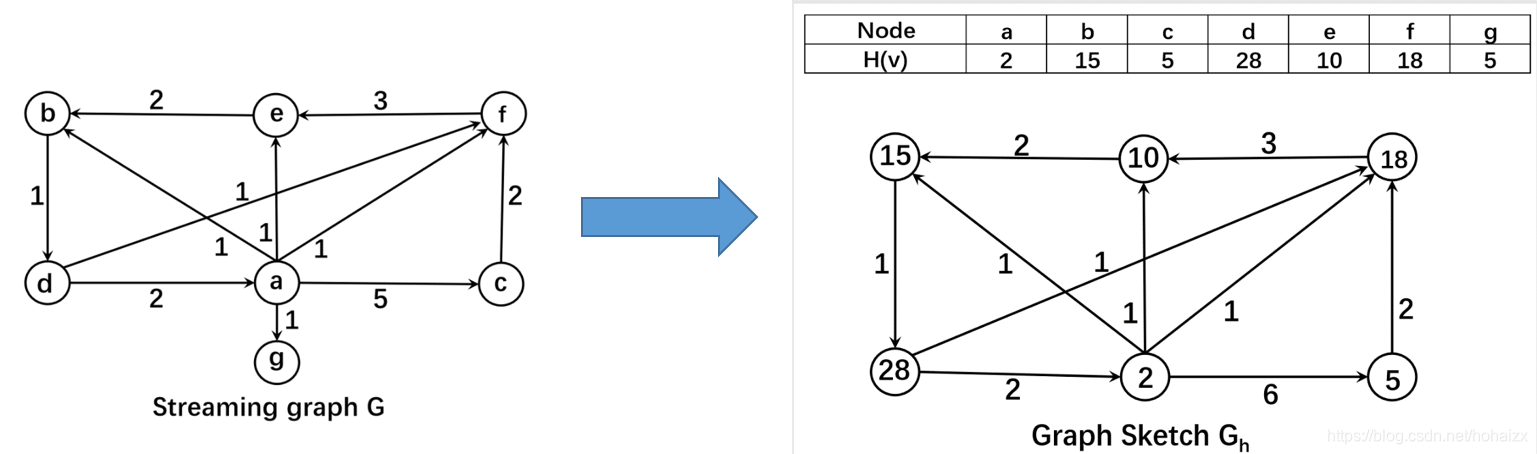
基本想法是:将图压缩成一个较小的图,然后采用矩阵存储。最简单的想法是采用一个哈希函数 H ( ⋅ ) H(\cdot) H(⋅)将streaming图G映射成一个较小的图 G h G_h Gh,节点的原始ID存储在一个哈希表中,这个操作被称为图sketch。
令
M
M
M表示映射函数的取值范围,只有
M
/
∣
V
∣
>
200
M/|V|>200
M/∣V∣>200,查询正确率才会大于80%,因此存储依旧非常占用空间,为此邹磊老师提出了Graph Stream Sketch(GSS)。
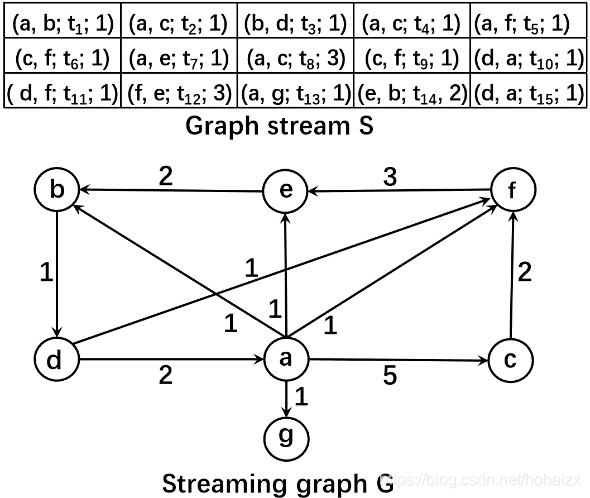
Graph Stream Sketch(GSS)
图sketch
G
h
G_h
Gh中每一条边
(
H
(
S
)
,
H
(
d
)
)
→
\overrightarrow{(H(S),H(d))}
(H(S),H(d))被映射到矩阵
h
(
s
)
h(s)
h(s)行,
h
(
d
)
h(d)
h(d)列,并在该位置存储
[
<
f
(
s
)
,
f
(
d
)
>
,
w
]
[<f(s),f(d)>,w]
[<f(s),f(d)>,w],其中address
h
(
v
)
=
⌊
H
(
v
)
/
F
⌋
ℎ(v)=\lfloor{H(v)/F}\rfloor
h(v)=⌊H(v)/F⌋,fingerprint
f
(
v
)
=
H
(
v
)
f(v)=H(v)%F
f(v)=H(v) ,对于一个16-bit的fingerprint,
F
=
65536
F=65536
F=65536。如果矩阵中某个位置已经被占据,则将其存储到buffer中。
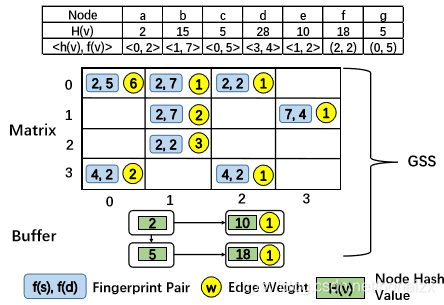
对于一条给定的边
(
s
,
d
)
→
\overrightarrow{(s,d)}
(s,d),首先计算出
h
(
s
)
h(s)
h(s)和
h
(
d
)
h(d)
h(d),定位到矩阵中的对应位置,检查其中存储的值是否等于
⟨
f
(
s
)
,
f
(
d
)
⟩
⟨f(s),f(d)⟩
⟨f(s),f(d)⟩,如果是则返回边的权重,如果不相等,则检查相应的buffer。
在计算顶点
v
v
v的1-hop后继节点时,首先定位到
h
(
v
)
h(v)
h(v)行,对于每一个
⟨
f
(
v
)
,
f
(
v
s
)
⟩
⟨f(v),f(v_s)⟩
⟨f(v),f(vs)⟩,计算
H
(
v
s
)
=
c
×
F
+
f
(
v
s
)
H(v_s )=c×F+f(v_s)
H(vs)=c×F+f(vs),然后查找哈希表得到原始ID。
上述想法中,buffer的存在会占据大量的内存和更新开销,但矩阵中可能还存在很多空置的bucket,可以对冲突的值进行二次哈希,填入其他空置的bucket。
总结
由于本人最近刚开始关注图计算研究,因此研究并不深入,整理总结的可能有很多不恰当的地方,欢迎大家多多指教。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









