






原理图
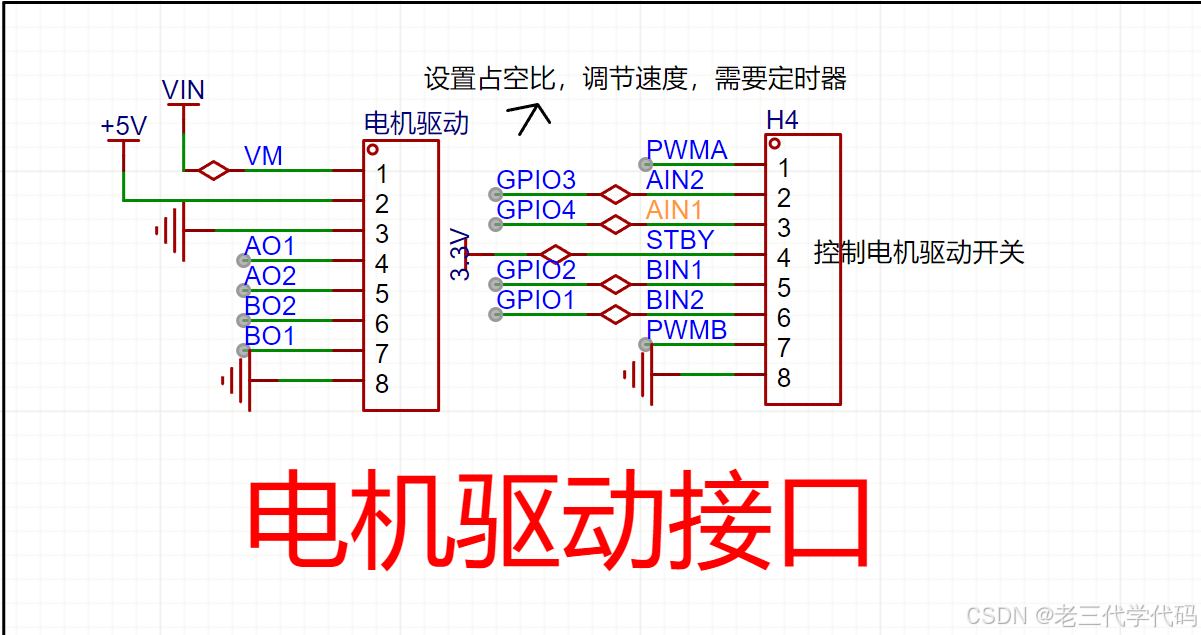
电机驱动接口
一共分为输入和输出端口
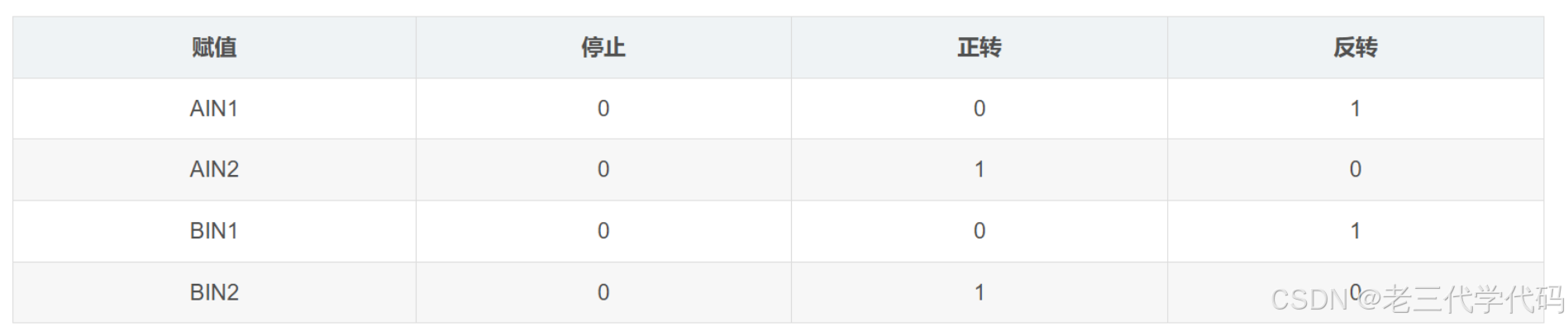
输入一共有两组,分为ab两组,pwm控制转速,ain2和ain1的高低电平控制转向,stby控制驱动是否工作
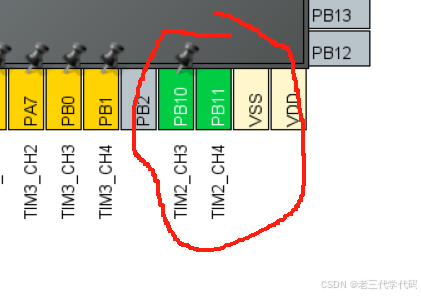
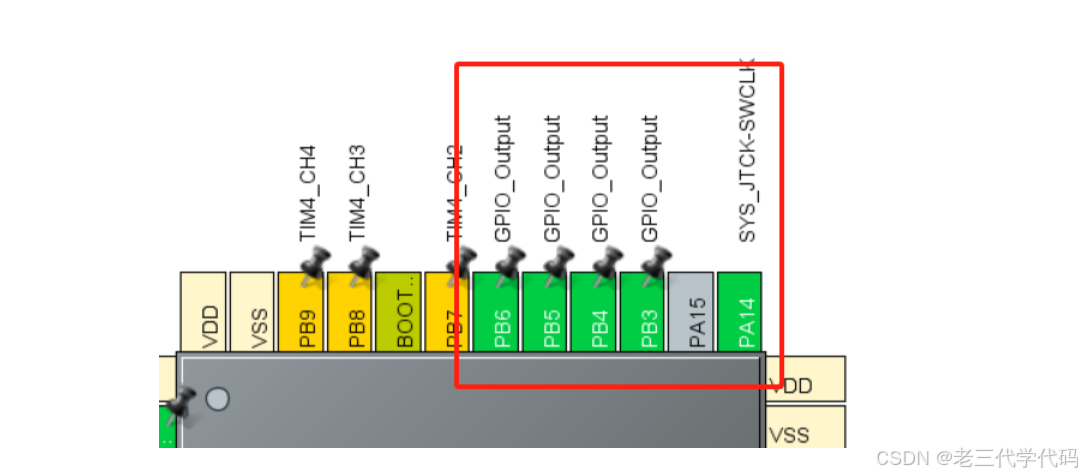
输出也有两组,编码器a相和b相PWMA->PB10
PWMB->PB11
AIN1->B4
AIN2->B3
BIN1->B5
BIN2->B6
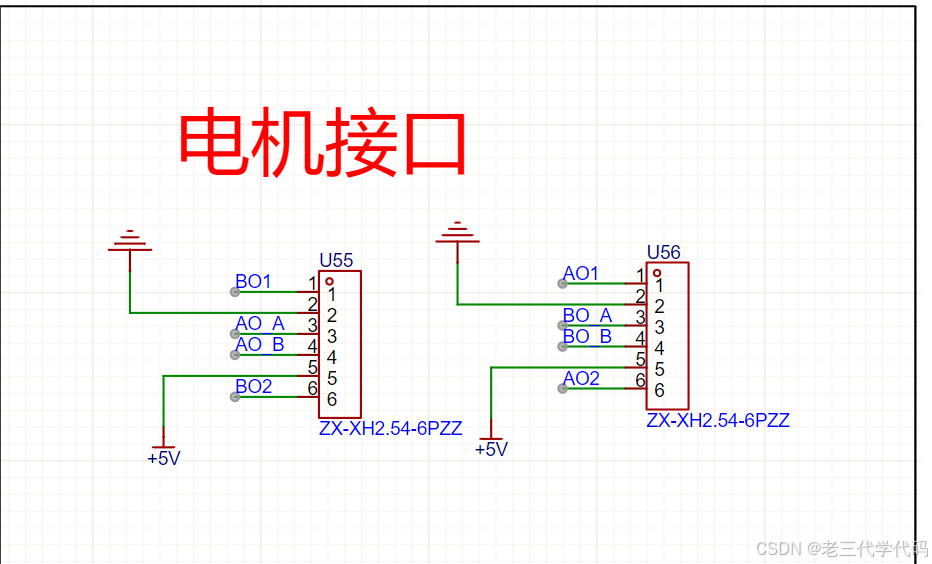
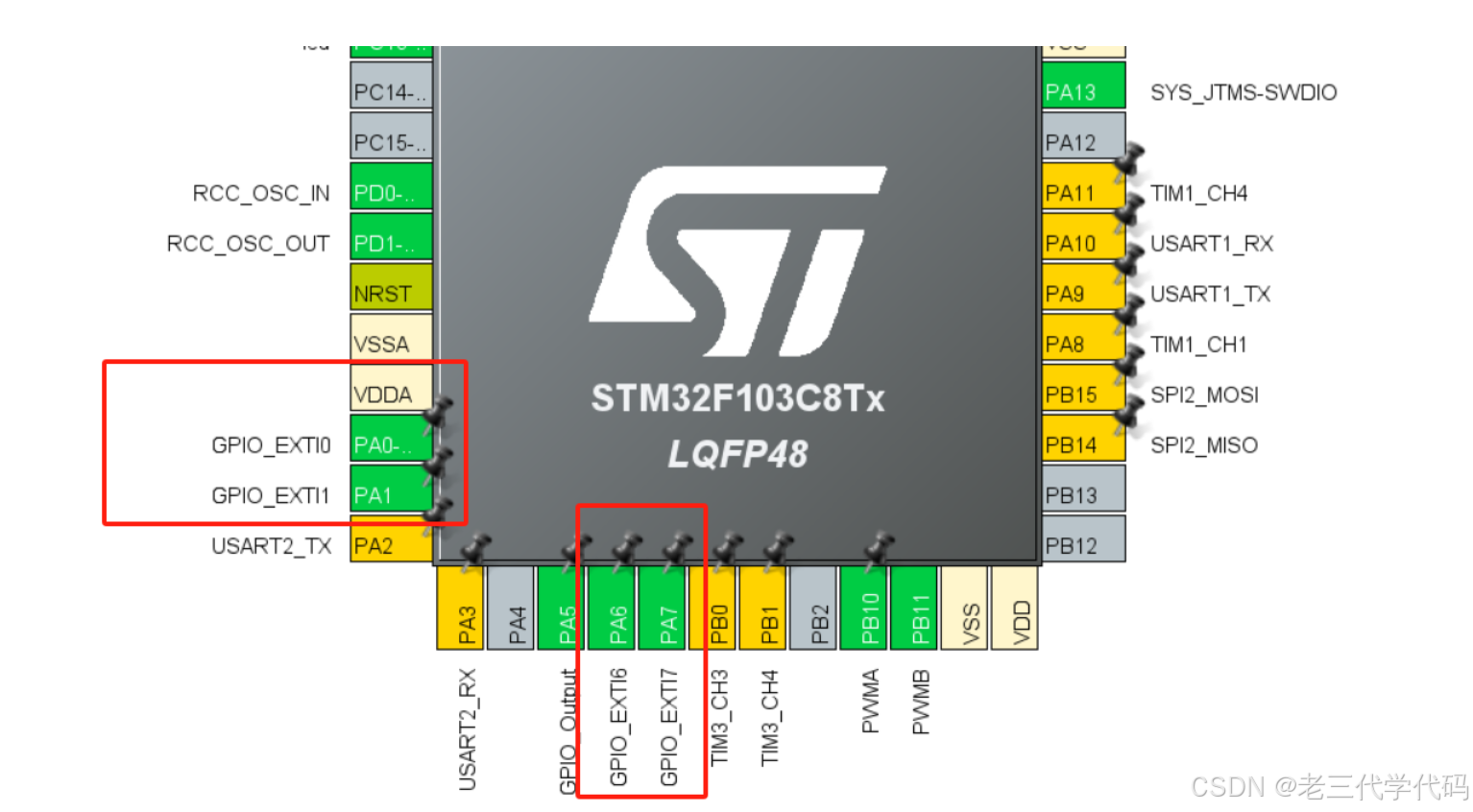
电机接口
编码器a相和b相输入到单片机进行计算,计算出转速和转向,连接有外部中断功能的io口
BO1,BO2为电机的驱动信号输入,还有两个为稳压模块供电,电机5v和gnd接反,编码器就不会工作AO_A->PA0
AO_B->PA1
BO_A->PA6
BO_B->PA7
开环控制
pwm波控制车速
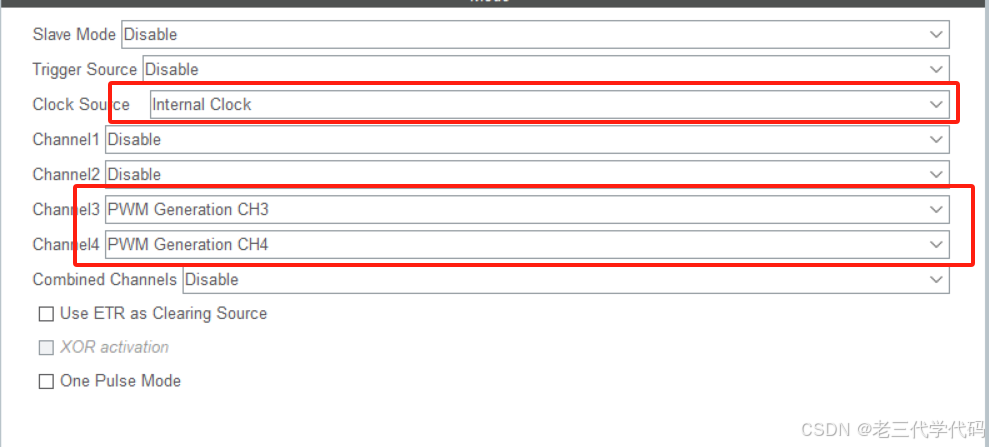
Cube初始化配置
这里是我自己设置的,如果pwm设置成别的pid的数据需要自己自行调试
选择模式和初始化
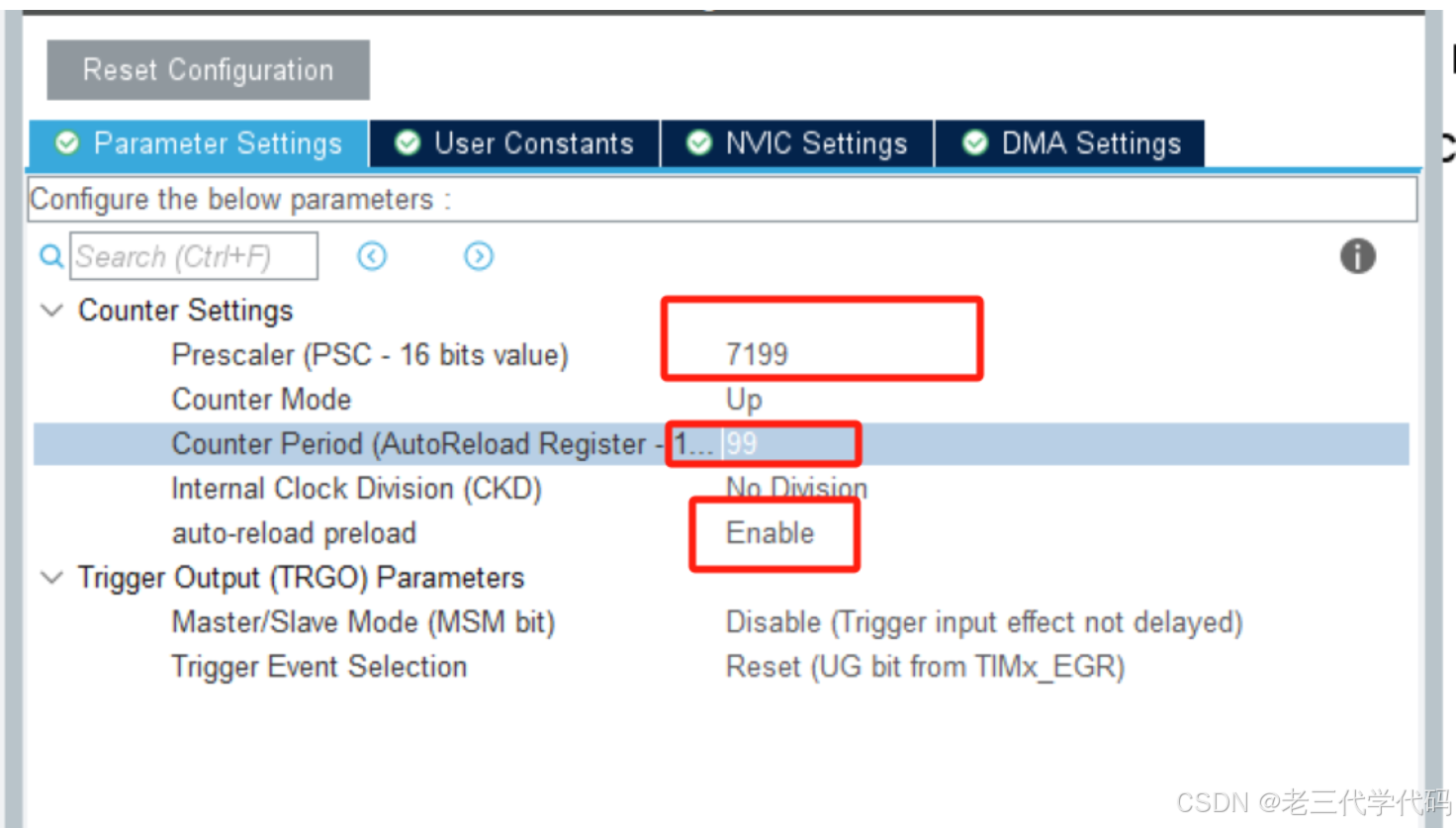
预分频器(PSC) 和 自动重载寄存器(ARR)
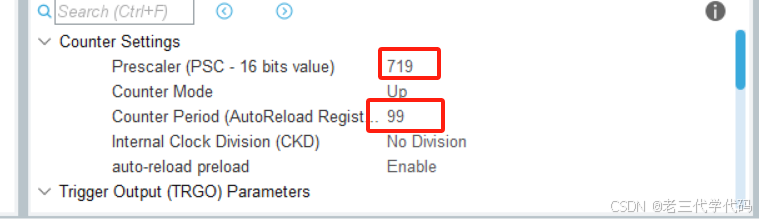
Prescaler(预分频器)设置为定时器时钟频率
实际计数频率 = 时钟源频率 / ( P r e s c a l e r + 1 ) 实际计数频率 = 时钟源频率 / (Prescaler + 1) 实际计数频率=时钟源频率/(Prescaler+1)
Counter Period(计数周期,ARR - Auto Reload Register)
P W M 周期 = ( A R R + 1 ) / 计数频率 PWM周期 = (ARR + 1) / 计数频率 PWM周期=(ARR+1)/计数频率
占空比 = P u l s e / ( A R R + 1 ) ∗ 100 占空比=Pulse/(ARR+1)*100% 占空比=Pulse/(ARR+1)∗100
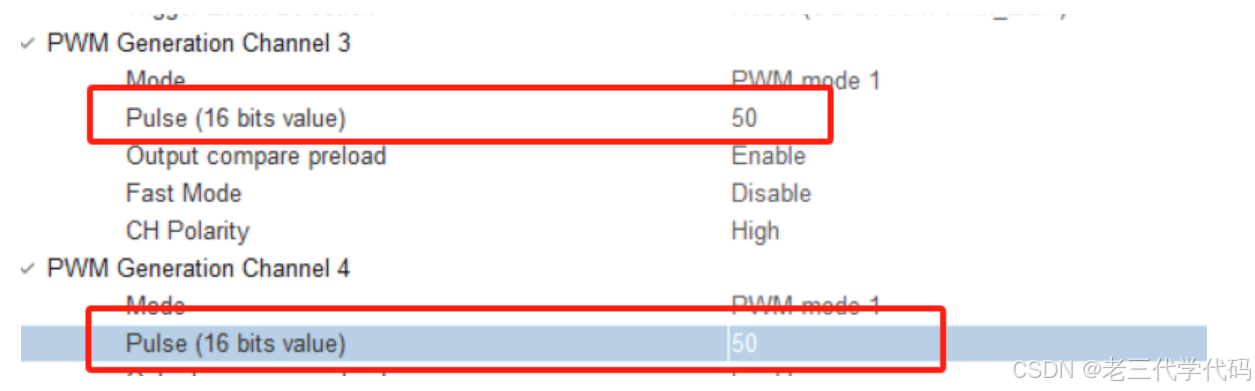
初始占空比
设置的步骤
步骤1:确定定时器时钟频率 1. ⾸先确定定时器的时钟源频率(通常是APB1或APB2时钟频率) 例如,如果APB1时钟频率是72MHz,那么定时器时钟频率通常也是72MHz(除⾮有 额外的分频设置)。
步骤2:设定PWM频率 1. 根据需要的PWM频率,确定预分频器(Prescaler)和⾃动重装寄存器(ARR)的值 例如,如果您需要⽣成1kHz的PWM信号,且定时器时钟频率为72MHz:
选择合适的Prescaler和ARR值。例如,您可以选择:
Prescaler = 7199(将时钟频率分频为10kHz)
ARR = 999(使PWM频率为1kHz)
步骤3:设定PWM占空⽐ 1. 确定所需的占空⽐(例如50%),然后计算对应的CCR值 假设ARR = 999,那么对应的50%占空⽐:
步骤4:在CubeMX中配置
-
打开CubeMX并选择定时器:选择⽤于PWM的定时器(如TIMx)并选择PWM输出引脚。
-
配置定时器参数
Prescaler:设置为72。
Counter Period (ARR):设置为999。
Pulse (CCR):设置为500(⽤于⽣成50%的占空⽐)。
-
⽣成代码并初始化:在⽣成的代码中,定时器的初始化代码会⾃动使⽤这些配置
定时器时钟频率 f_timer 为 1 MHz(每秒 1000000 次)。
设置 ARR 为 999,意味着定时器周期为 1000 个时钟周期,即 PWM 信号的周期为 1 毫秒(1 kHz 的频率)。
假设 CCR 设置为 500,那么高电平持续的时间为 500 个时钟周期。
初始化
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_3);//开启定时器2 通道3 PWM模式
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_4);//开启定时器2 通道3 PWM模式
宏来修改占空比
__HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_3, 40);//修改定时器2 通道3为40占空比
gpio口控制方向
Cube初始化配置
改标签

代码
宏定义
#define Amplitude 95 /* PWM满幅是100 */
#define Dead_Voltage 2070 /* 死区电压 */
#define PWMA TIM2->CCR3 /* PB10 */
#define PWMB TIM2->CCR4 /* PB11 */
控制电机进行正转、反转、停止
/**
* @brief 控制电机进行正转、反转、停止
* @param None
* @retval None
*/
void LeftMotor_Go() //左电机正转 AIN输出相反电平 BIN也输出相反电平
{
HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(AIN2_GPIO_Port, AIN2_Pin, GPIO_PIN_RESET);
}
void LeftMotor_Back() //左电机反转
{
HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(AIN2_GPIO_Port, AIN2_Pin, GPIO_PIN_SET);
}
void LeftMotor_Stop() //左电机停止 AIN和BIN输出相同电平
{
HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(AIN2_GPIO_Port, AIN2_Pin, GPIO_PIN_RESET);
}
void RightMotor_Go() //右电机正转 AIN输出相反电平 BIN也输出相反电平
{
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET);
}
void RightMotor_Back() //右电机反转
{
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_SET);
}
void RightMotor_Stop() //右电机停止 AIN和BIN输出相同电平
{
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET);
}
滤波
float LimitPWM(float data, float max)
{
// 检查最大值是否为有效值
if (max <= 0)
{
return 0; // 如果max不合理,返回0作为错误处理
}
// 限制data值在[-max, max]之间
if (data < -max)
{
return -max; // 如果data小于-max,返回-max
}
else if (data > max)
{
return max; // 如果data大于max,返回max
}
return data; // 如果data在范围内,返回原始data
}
分别控制左右电机速度
// 控制左电机
void ControlLeftMotor(int leftMotorPWM)
{
// 控制左电机的方向
if (leftMotorPWM > 0)
{
// 如果左电机PWM是正值,逆时针转
LeftMotor_Back();
}
else
{
// 如果左电机PWM是负值,顺时针转动
LeftMotor_Go();
}
leftMotorPWM = abs(leftMotorPWM); // 取绝对值,忽略死区电压
PWMA = LimitPWM(leftMotorPWM, Amplitude); // 设置左电机PWM
}
// 控制右电机
void ControlRightMotor(int rightMotorPWM)
{
// 控制右电机的方向
if (rightMotorPWM > 0)
{
// 如果右电机PWM是正值,逆时针转动
RightMotor_Go();
}
else
{
// 如果右电机PWM是负值,顺时针转动
RightMotor_Back();
}
rightMotorPWM = abs(rightMotorPWM); // 取绝对值,忽略死区电压
PWMB = LimitPWM(rightMotorPWM, Amplitude); // 设置右电机PWM
}
总的控制函数
用来控制左右电机的前进与后退,方便后面进行原地转向
/**
* @brief 控制电机进行速度控制
* @param
* 对于单个轮子来说输入的pwm为正则向前走,为负则向后走
leftMotorPWM:左电机的 PWM 值,用于控制左电机的速度,
rightMotorPWM:右电机的 PWM 值,用于控制右电机的速度。
* @retval None
*/
void MotorControl(int leftMotorPWM, int rightMotorPWM)
{
ControlLeftMotor(leftMotorPWM); // 控制左电机
ControlRightMotor(rightMotorPWM); // 控制右电机
}
读取脉冲数
通常情况下编码器旋转一周会输出固定的脉冲数,即编码器的分辨率,通过测量固定时间T内编码器输出的脉冲数即可求得电机的转速。
假设编码器的分辨率为 ( P )(单位:脉冲/转),即编码器在电机转动一周时会输出 ( P ) 个脉冲。在 ( T ) 时间内测得的脉冲数为 ( m ) 个。要计算电机的转速(单位:转/分钟),我们可以使用以下步骤:
-
首先,计算电机在 ( T ) 秒内转动的圈数。由于每转动一圈编码器产生 ( P ) 个脉冲,( m ) 个脉冲对应的圈数 ( n ) 为:
n = m P n = \frac{m}{P} n=Pm
-
然后,将 ( n ) 圈转换为每分钟的转数。已知 ( n ) 圈是在 ( T ) 秒内完成的,所以每秒的转数为
( n T ) ( \frac{n}{T} ) (Tn)
每分钟的转数为:
R P M = n T × 60 = m P × 60 T RPM = \frac{n}{T} \times 60 = \frac{m}{P} \times \frac{60}{T} RPM=Tn×60=Pm×T60
因此,电机的转速 ( RPM )(单位:转/分钟)可以用公式表示为:
R
P
M
=
60
×
m
P
×
T
×
4
×
R
RPM = \frac{60 \times m}{P \times T\times 4}\times R
RPM=P×T×460×m×R
这里:
- ( m ) 是在时间 ( T ) 内测得的脉冲数
- ( P ) 是编码器的分辨率
- ( R ) radio为减速比
- ( T ) 是测量时间,单位为秒(注意转换为分钟需要乘以 60)
通过这个公式,你可以计算出电机的转速,只需要将 ( m ),( P ),( R )和 ( T ) 的值代入即可。
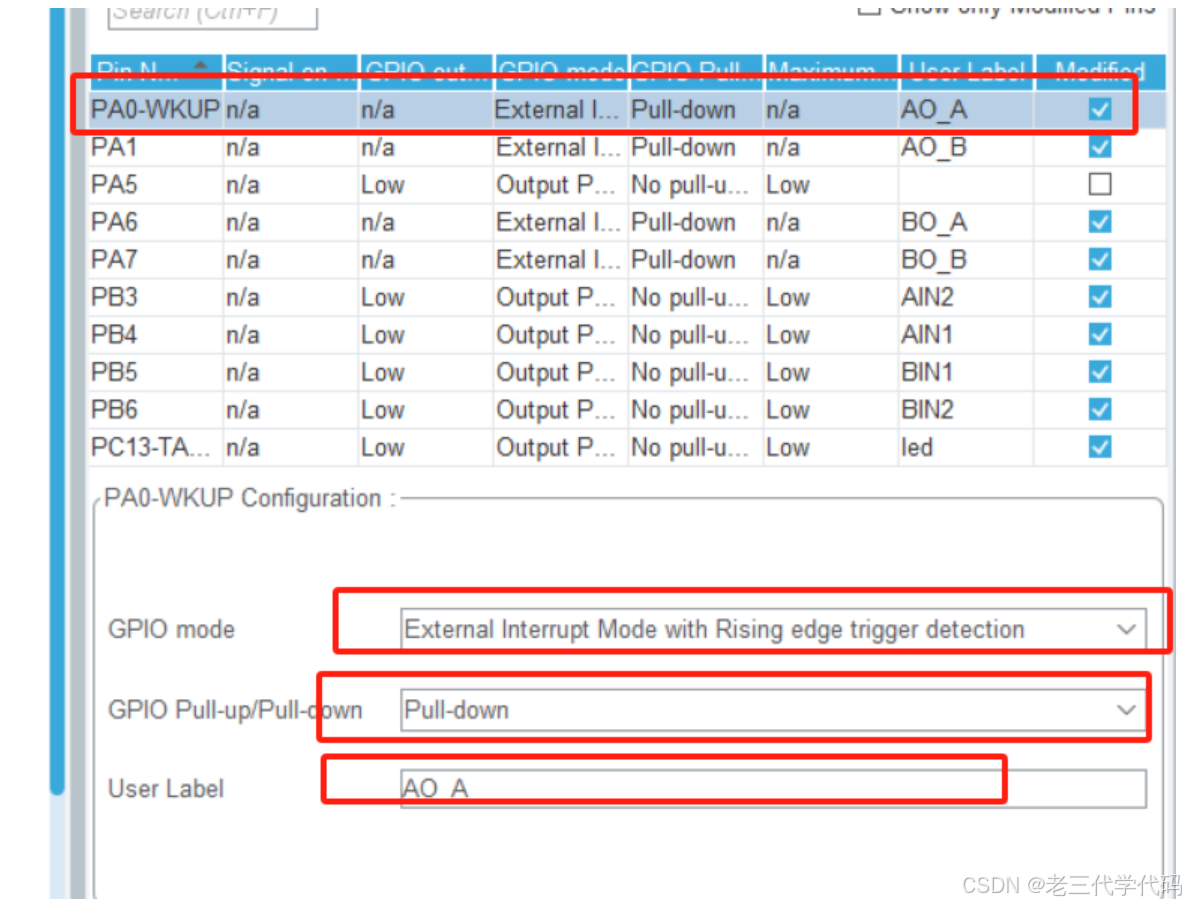
外部中断读取脉冲数
cube配置(外部中断模式)
更节省资源
改标签,设置外部中断模式为上升沿和下降沿都触发
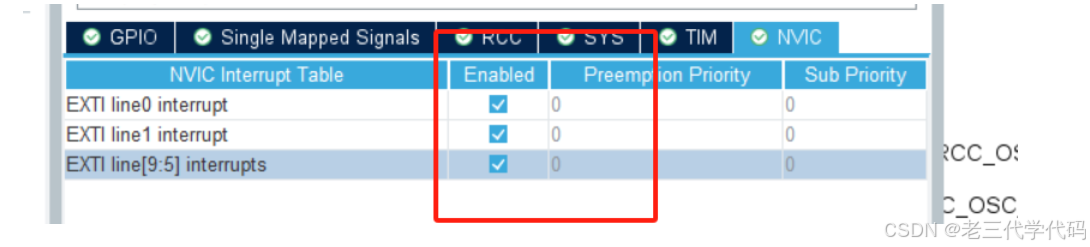
开启全局中断
代码
int pulse_numA;
int pulse_numB;
// 外部中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
// 判断是否为GPIO_PIN_0中断,即A相编码器脉冲输入
if(GPIO_Pin == GPIO_PIN_0)
{
// A相信号下降沿
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == 0)
{
// 如果B相信号也为低,表示反向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == 0)
pulse_numB--;
else // 否则为正向旋转
pulse_numB++;
}
// A相信号上升沿
else
{
// 如果B相信号为低,则为正向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == 0)
pulse_numB++;
else // 否则为反向旋转
pulse_numB--;
}
}
// 判断是否为GPIO_PIN_1中断,即B相编码器脉冲输入
else if(GPIO_Pin == GPIO_PIN_1)
{
// B相信号下降沿
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == 0)
{
// 如果A相信号为低,则为正向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == 0)
pulse_numB++;
else // 否则为反向旋转
pulse_numB--;
}
// B相信号上升沿
else
{
// 如果A相信号为低,则为反向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == 0)
pulse_numB--;
else // 否则为正向旋转
pulse_numB++;
}
}
// 判断是否为GPIO_PIN_6中断,处理另一组编码器输入(如果存在)
if(GPIO_Pin == GPIO_PIN_6)
{
// A相信号下降沿
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_6) == 0)
{
// 如果B相信号为低,则为反向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == 0)
pulse_numA--;
else // 否则为正向旋转
pulse_numA++;
}
// A相信号上升沿
else
{
// 如果B相信号为低,则为正向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == 0)
pulse_numA++;
else // 否则为反向旋转
pulse_numA--;
}
}
// 判断是否为GPIO_PIN_7中断,处理第二组B相编码器输入
else if(GPIO_Pin == GPIO_PIN_7)
{
// B相信号下降沿
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_7) == 0)
{
// 如果A相信号为低,则为正向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_6) == 0)
pulse_numA++;
else // 否则为反向旋转
pulse_numA--;
}
// B相信号上升沿
else
{
// 如果A相信号为低,则为反向旋转
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_6) == 0)
pulse_numA--;
else // 否则为正向旋转
pulse_numA++;
}
}
}
定时器中断间隔读取脉冲数
定时器中断读取脉冲
用一个没有配置的定时器滤波,打开定时器全局中断
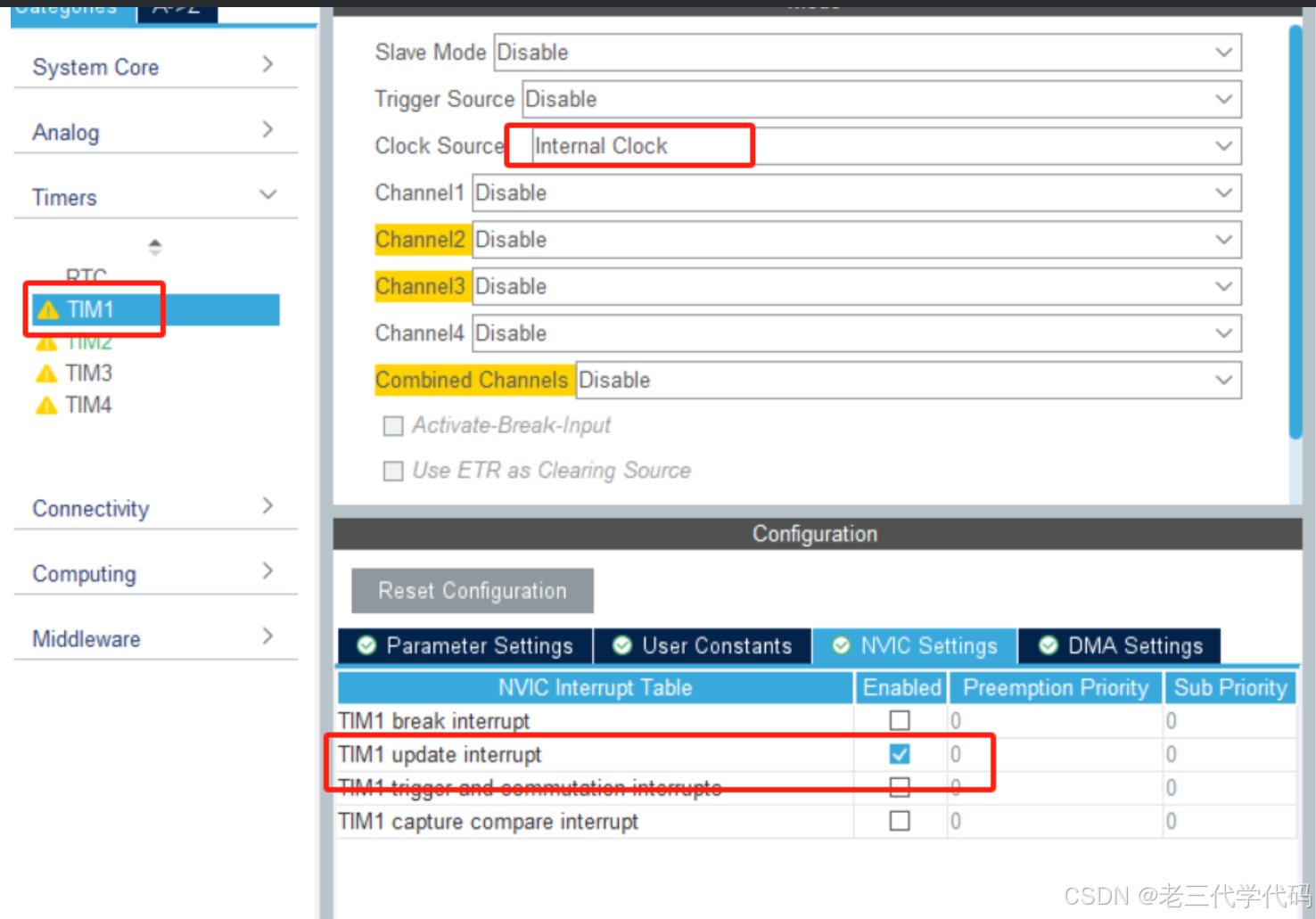
- 定时时间=(Prescaler +1)* (Counter Period +1)/ 晶振频率(72Mhz)10ms读取一次
代码
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim == &htim1)//htim1 500HZ 2ms 中断一次
{
TimerCount++;
if(TimerCount %5 == 0)//每10ms执行一次
{
encountA=pulse_numA;
encountB=-pulse_numB;
rpma=(float)encountA*100/4321*60;
rpmb=(float)encountB*100/4321*60;
pulse_numA=0;
pulse_numB=0;//清零
}
}
}
速度计算为1秒读取的脉冲数/减速比/编码器线速/4
PID控制
原理
在我的应用中,PWM值限制在 0 到 100 之间
了解 PID 控制原理
Kp(比例增益):比例增益主要影响系统对误差的反应。当误差较大时,Kp会产生一个较大的控制信号。适当增大Kp可以提高系统响应速度,但过大可能导致系统过冲和振荡。Ki(积分增益):积分增益通过累积历史误差来修正系统长期存在的小误差。如果系统存在持续的偏差(例如,目标值和实际值的差异),Ki会逐渐增大控制信号,直到误差消失。过大的Ki可能导致系统振荡和不稳定。Kd(微分增益):微分增益根据误差变化速率做出反应,帮助系统减小过冲并提高系统的稳定性。Kd对快速变化的误差敏感,可以抑制系统的振荡。
调节 PID 参数的基本原则
调节PID参数是一项迭代的过程,通常需要进行反复实验和微调。
调节 Kp (比例增益)
- 目标:让系统响应目标值的变化,不要过快或过慢。
- 方法:从一个小的
Kp值开始,逐步增大,直到系统对误差的响应足够快,但不会导致输出过大或过冲。 - 注意:如果
Kp太大,系统可能会发生振荡或过冲,导致输出值超出0到100的范围。
调节 Ki (积分增益)
- 目标:消除长期的小误差,使系统更精确地达到目标值。
- 方法:从
Ki = 0开始,逐渐增大。Ki的作用是消除由比例控制器无法解决的稳定误差(例如,常见的偏差)。增加Ki可以提高系统的精度,但过大可能导致振荡。 - 注意:如果
Ki设置过大,可能导致误差累积过快,造成控制输出过大,甚至产生不稳定的振荡。
调节 Kd (微分增益)
- 目标:减少系统的过冲和振荡。
- 方法:
Kd控制误差变化的速率,它可以减缓过度的响应,帮助减少系统振荡。首先将Kd设置为零,然后逐步增大,直到系统反应平稳且没有过度震荡。 - 注意:如果
Kd设置过大,系统响应可能会变得过于迟缓,或者产生不必要的抑制。
使用 PID 调参技巧
调参通常是一个渐进的过程,下面是几种常见的调参技巧:
Ziegler-Nichols 调参法(经验法)
这是最常用的调参方法之一,基于通过实验找到的经验公式。以下是基本步骤:
1. 将 `Ki` 和 `Kd` 设置为 0。
2. 增大 `Kp`,直到系统开始稳定振荡(输出值开始周期性波动)。
3. 记录下此时的 `Kp` 值,这个值被称为临界增益 `Kc`。
4. 记录下此时的振荡周期 `P`。
5. 使用以下公式来计算 `Ki` 和 `Kd`:
- `Kp = 0.6 * Kc`
- `Ki = 2 * Kp / P`
- `Kd = Kp * P / 8`
逐步调整法
逐步调整每个参数,从 Kp 开始,调整到合适值后再调整 Ki,最后调整 Kd。这种方法适合有经验的调参人员,可以灵活调整。
实际应用中的调参
在你的情况下,PWM 输出范围是 0 到 100,调参时你需要特别注意以下几点:
-
限制输出范围:确保控制输出(
pid->actual_val)在0到100之间。例如,如果 PID 计算得到的值超出了这个范围,可以通过如下代码进行限制:if (pid->actual_val > 100) pid->actual_val = 100; if (pid->actual_val < 0) pid->actual_val = 0; -
避免过冲和震荡:设置
Kp时要注意不要让系统产生过大的响应,这样可能会导致输出超出0到100的范围,或者产生较大的振荡。 -
逐步增加
Ki:积分项有助于消除长期误差,但如果积分项太大,可能会导致控制器输出过度修正,从而导致输出溢出(大于100)。因此,要小心增大Ki的值。 -
微调
Kd:适当的Kd值可以帮助减少系统振荡,尤其是当误差变化较快时,Kd有助于平滑输出。过高的Kd值可能会使控制器反应过于迟缓,因此要小心调整。
调试时观察和调整
- 在调试时,可以观察 PID 控制器的响应:
- 如果系统响应过快并发生过冲,减小
Kp或增加Kd。 - 如果系统反应迟缓且无法跟踪目标,增加
Kp。 - 如果长期存在偏差,增加
Ki。
- 如果系统响应过快并发生过冲,减小
最终的 PID 参数需要通过实验来确定,不同的系统和不同的负载可能需要不同的参数设置。调节过程中,可能需要反复进行试验,微调各个参数,直到系统达到稳定、快速响应的目标。
转速,转数和脉冲数的转化函数
转速对应编码器脉冲数
增量式控制
/**************************************************************************
功 能: 计算转速对应编码器脉冲数
输 入: rpm:转速;ppr:码盘数;ratio:减速比;cnt_time:计数时间(ms)
返 回 值: 电机脉冲数
**************************************************************************/
long Rpm_Encoder_Cnt(float rpm,uint16_t ppr,uint16_t ratio,uint16_t cnt_time)
{
return (rpm*ratio*ppr*4)/(60*1000/cnt_time); /* 4倍频 */
}
转数对应编码器脉冲数
用于位置环控制
/**************************************************************************
功 能: 计算转数对应编码器脉冲数
输 入: num:转数;ppr:码盘数;ratio:减速比
返 回 值: 电机脉冲数
**************************************************************************/
long Num_Encoder_Cnt(float num,uint16_t ppr,float ratio)
{
return (num*ratio*ppr*4); /* 4倍频 */
}
长度对应编码器脉冲数
通常用来控制小车差速进行自转
/**************************************************************************
功 能: 计算所走长度对应编码器脉冲数
输 入: Length:所走长度;ppr:码盘数;ratio:减速比
返 回 值: 电机脉冲数
**************************************************************************/
long Length_Encoder_Cnt(float Length,uint16_t ppr,float ratio)
{
float num=Length/20.4;//厘米为单位,20.4为车轮周长
return (num*ratio*ppr*4); /* 4倍频 */
}
//4分之1圆周为11.10775
定义基础变量
//声明一个结构体类型
typedef struct
{
float target_val;//目标值
float Kp,Ki,Kd;//比例,积分,微分系数
} tPid;
初始化
void PID_init(void)
{
//速度环
pidMotor1Speed.target_val=0;
pidMotor1Speed.Kp=5;
pidMotor1Speed.Ki=0.11;
pidMotor1Speed.Kd=0;
pidMotor2Speed.target_val=0;
pidMotor2Speed.Kp=5;
pidMotor2Speed.Ki=0.11;
pidMotor2Speed.Kd=0;
pidMotor1PositionSpeed.target_val=0;
pidMotor1PositionSpeed.Kp=5;
pidMotor1PositionSpeed.Ki=0.11;
pidMotor1PositionSpeed.Kd=0;
pidMotor2PositionSpeed.target_val=0;
pidMotor2PositionSpeed.Kp=5;
pidMotor2PositionSpeed.Ki=0.11;
pidMotor2PositionSpeed.Kd=0;
//位置环
pidMotor1Position.target_val=0;
pidMotor1Position.Kp=0.18;
pidMotor1Position.Ki=0.002;
pidMotor1Position.Kd=0;
pidMotor2Position.target_val=0;
pidMotor2Position.Kp=0.18;
pidMotor2Position.Ki=0.002;
pidMotor2Position.Kd=0;
//巡线环
pidOpenmv_Tracking.target_val=0;
pidOpenmv_Tracking.Kp=3;
pidOpenmv_Tracking.Ki=0;
pidOpenmv_Tracking.Kd=0.12;
}
增量式
通过这个函数改变目标值,增量式的目标值的输入是转速
void PID_control(float rpm1,float rpm2)
{
//pid控制电机速度
//pidMotor1Speed.target_val=rpma;
pidMotor1Speed.target_val=rpm1*4321/6000;
pidMotor2Speed.target_val=rpm2*4321/6000;
//pid控制电机速度
//Rpm_Encoder_Cnt(rpmb,11,98,10);
}
float Incremental_PID(tPid* pid,int actual_val)//传入目标值,实际值
{
static float Bias,Pwm,Last_bias,next_bias;//bias=Err
// static float Integral_bias;
Bias=pid->target_val-actual_val;//计算偏差
// Integral_bias+=Bias;
// Integral_bias=LimitPWM(Integral_bias,5000);
Pwm+=(pid->Kp*(Bias-Last_bias)+pid->Ki*Bias+pid->Kd*(Bias+next_bias-2*Last_bias));//增量式PI控制器
next_bias = Last_bias;
Last_bias=Bias;
if(Pwm>99)Pwm=99;
if(Pwm<-99)Pwm=-99;
return Pwm;
}
在定时器中断回调函数进行速度修正调整
if (abs(encountA)<=5&&pidMotor1Speed.target_val == 0)
PWMA = 0;
else
{
motorA = Incremental_PID(&pidMotor1Speed,encountA); /* 增量PID控制器 */
ControlLeftMotor(motorA);
}
if (abs(encountB)<=5&&pidMotor2Speed.target_val == 0)
PWMB = 0;
else
{
motorB = Incremental_PID(&pidMotor2Speed,encountB); /* 增量PID控制器 */
ControlRightMotor(motorB);
}
位置式
通过这个函数改变目标值,增量式的目标值的输入是转数
void PID_control_position(int rnuma,int rnumb)
{
//pid控制电机位置
pidMotor1Position.target_val=(float)Num_Encoder_Cnt(rnuma,11,98);
pidMotor2Position.target_val=(float)Num_Encoder_Cnt(rnumb,11,98);
}
通过这个函数控制车子自转
void PID_turn_control(uint8_t direction)
{
//pid控制转向
if(direction==0)//左转90度
{
pidMotor1Position.target_val=Length_Encoder_Cnt(-11.10775,11,98);;
pidMotor2Position.target_val=Length_Encoder_Cnt(11.10775,11,98);
}
else if(direction==1)//右转90度
{
pidMotor1Position.target_val=Length_Encoder_Cnt(11.10775,11,98);
pidMotor2Position.target_val=Length_Encoder_Cnt(-11.10775,11,98);
}
else if(direction==2)//不控制转向
{
pidMotor1Position.target_val=0;
pidMotor2Position.target_val=0;
}
}
/*********************************************************************
函数功能:位置式PID控制器
入口参数:编码器测量位置信息,目标位置
返回 值:电机PWM
根据位置式离散PID公式
pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2,,k;
pwm代表输出
********************************************************************/
int Position_PID (tPid*position,int actuel_position)
{
Bias=position->target_val-actuel_position;//计算偏差
Integral_bias+=Bias;
Integral_bias=LimitPWM(Integral_bias,fabs(Target_Velocity));
Pwm=position->Kp*Bias+position->Ki*Integral_bias+position->Kd*(Bias-Last_Bias);//位置式PID控制器
Last_Bias=Bias;
if(Pwm>10000)Pwm=10000;
if(Pwm<-10000)Pwm=-10000;
return Pwm;
}
串级pid控制
串级控制函数
位置环输出给速度环,调整速度环的目标速度
void PID_control_positionspeed(float rpm1,float rpm2)
{
//pid控制电机速度
//pidMotor1Speed.target_val=rpma;
pidMotor1PositionSpeed.target_val=rpm1*4321/6000;
pidMotor2PositionSpeed.target_val=rpm2*4321/6000;
//pid控制电机速度
//Rpm_Encoder_Cnt(rpmb,11,98,10);
}
在定时器中断回调函数进行速度修正调整
int motor_out=50;//串级pid控制限制的最大速度,巡线环控制的基础速度
static float motorA_position=0;
static float motorB_position=0;
if(pidMotor1Position.target_val!=0||pidMotor2Position.target_val!=0)//如果有目标值,则进行位置环控制
{
encountA_sum+=encountA;//进行脉冲数累加
encountB_sum+=encountB;
motorA_position=Position_PID (&pidMotor1Position,encountA_sum);//位置环输出期望的速度
motorA_position=LimitPWM(motorA_position,motor_out);//限制最大pwm值,限制输入给速度环的最大速度
motorB_position=Position_PID (&pidMotor2Position,encountB_sum);//位置环输出期望的速度
motorB_position=LimitPWM(motorB_position,motor_out);//限制最大pwm值,限制输入给速度环的最大速度
PID_control_positionspeed(motorA_position,motorB_position);//位置环的输出值输入给速度环
if(fabs((float)encountA_sum-pidMotor1Position.target_val)<10) /* 滤除部分干扰 */
{
motorA_position=0;
ControlLeftMotor(motorA_position);
// encountA_sum=0; /* 停止输出 */
}
else
{
motorA_position = Incremental_PID(&pidMotor1PositionSpeed,encountA); /* 增量式速度控制 */
ControlLeftMotor(motorA_position); /* 赋值 */
}
if(fabs((float)encountB_sum-pidMotor2Position.target_val)<10) /* 滤除部分干扰 */
{
motorB_position=0;
ControlRightMotor(motorB_position);
// encountB_sum=0; /* 停止输出 */
}
else
{
motorB_position = Incremental_PID(&pidMotor2PositionSpeed,encountB); /* 增量式速度控制 */
ControlRightMotor(motorB_position); /* 赋值 */
}
if(motorA_position==0&&motorB_position==0)
{
turn_flag=0;
track_flag=0;
}
}
巡线环控制
使用位置式pid
/*巡线状态检测及PID运算*/
float PID_Openmv_Tracking(int8_t ThisState,tPid *pid)
{
float error=ThisState; //此次的误差
static float integral,last_error; //积分累加项
float output; //PID输出
integral += error; //积分累加
if (integral > 100) integral = 100; // 防止积分项溢出
if (integral < -100) integral = -100;
output = pid->Kp * error + pid->Ki * integral + pid->Kd * (error - last_error);
last_error = error;
return output; //最后PID运算得到的是一个电机的差速调整值
}
通过位置给g_cThisState赋值
if (leftArea2== 0 && leftArea1 == 0 && rightArea1 == 0&&rightArea2 == 0)
{
// 中间检测到线,左右没有线,继续前进
g_cThisState = 0;
}
else if (leftArea2== 0 && leftArea1 == 1 && rightArea1 == 0&&rightArea2 == 0)
{
// 中间和左侧检测到线,右侧没有线,可能偏离路线,继续前进或寻线
g_cThisState = 1; // 根据需要可调整为其他状态,如停止
}
else if (leftArea2== 1 && leftArea1 == 1 && rightArea1 == 0&&rightArea2 == 0)
{
// 中间和右侧检测到线,左侧没有线,右转
g_cThisState = 2;
}
else if (leftArea2== 1 && leftArea1 == 0 && rightArea1 == 0&&rightArea2 == 0)
{
// 左侧检测到线,右侧没有线,左转
g_cThisState = 3;
}
else if (leftArea2== 0 && leftArea1 == 0 && rightArea1 == 1&&rightArea2 == 0)
{
// 右侧检测到线,左侧没有线,右转
g_cThisState = -1;
}
else if (leftArea2== 0 && leftArea1 == 0 && rightArea1 == 1&&rightArea2 == 1)
{
// 右侧检测到线,左侧没有线,右转
g_cThisState = -2;
}
else if (leftArea2== 0 && leftArea1 == 0 && rightArea1 == 0&&rightArea2 == 1)
{
// 右侧检测到线,左侧没有线,右转
g_cThisState = -3;
}
在电机函数修正双轮差速
int motor_out=50;//串级pid控制限制的最大速度,巡线环控制的基础速度
void motor_proc(void)
{
static float PWMA_out=0;
static float PWMB_out=0;
float fHW_PID_Out=PID_Openmv_Tracking(g_cThisState,&pidOpenmv_Tracking);
PWMA_out=LimitPWM((motor_out-fHW_PID_Out),70);
PWMB_out=LimitPWM((motor_out+fHW_PID_Out),70);
PID_control(PWMA_out,PWMB_out);//速度环控制
}


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









