







S5PV210开发系列五
sd卡驱动实现
象棋小子 1048272975
SD卡(Secure Digital Memory Card)具有体积小、容量大、数据传输快、可插拔、安全性好等优点,被广泛应用于便携式设备上。例如作为数码相机的存储卡,作为手机、平板多媒体扩展卡用的TF卡(micro sd)。笔者此处就S5PV210的 sd卡驱动实现作一个简单的介绍。
1. sd卡概述
sd卡技术是在MMC卡的基础上发展起来的,其尺寸与MMC卡一样,只是比MMC卡厚了0.7mm,因此sd设备可以识别并存取MMC卡。sd卡接口除了保留MMC卡的7针外,还在两边加了2针,作为数据线,目的是通过把传输方式由串行变成并行,以提高传输速率。此时的规范为sd1.0版本,最高容量只能到4GB。为了跟进产品的更新换代,sd联合协会在06年发布了容量更大、存储更快的下一代sd卡规范sd2.0。该规范重新定义了sd卡的速度等级,分为三档:Class 2、4、6,分别对应写入速度2MB/s、4MB/s、6MB/s。根据卡容量又分为标准卡(小于2GB)和高容量卡(2GB~32GB),目前市面上应用的sd卡绝大部分都是sd2.0版本的卡。为了让储存卡更加迷你,通过sd卡规范标准,又衍生了MiniSD卡和Micro SD卡,这些卡均比标准sd卡尺寸小,通过sd转接卡可以当作一般的sd卡使用。尤其是Micro SD卡,可以算是最小的存储卡了,超小的体积可以极大的节省消费电子产品内部设计的空间,基本目前的android手机均是选用Micro SD卡作为多媒体扩展储存卡。随着科技的进步,sd2.0规范sd卡也渐渐无法满足应用的需求,在10年sd联合协会又发布了新的sd3.0规范,该规范定义了sdxc和uhs,并增加了Class10,容量范围为32GB~2TB。在sdxc卡仍需进一步坐等其价格下降的情况下,sd4.0规范已经开始在紧张的制订中,这已超出本文的讨论范围内了。
2. sd卡驱动编写
sd卡共支持三种传输模式:spi模式、1位sd模式、4位sd模式。所有的sd卡都必须支持较老的spi/mmc模式,这个模式支持慢速的四线spi接口,使很多微控制器都可以通过spi或模拟spi接口来读写sd卡。由于S5PV210具有sd卡主机控制器,并且支持sd2.0标准,此处只分析4位sd模式、sd2.0及sd1.0版本的sd卡驱动实现,sd2.0以上版本sd卡、MMC卡、spi方式读写sd卡在本文不适用。
sd2.0标准定义了物理层相关规范以及主机控制器规范,sd卡驱动的编写必须参考这两个规范,主要是对S5PV210中的sd主机控制器的编程,这部分对所有具有sd主机控制器的微处理器均是适用的,只是寄存器名称的差异。此处只根据sd2.0规范讲解几个重要的过程或概念,这些过程具体的实现请参考sd驱动模块中相应的函数实现。
2.1. sd卡初始化及识别过程
sd卡上电后,将进入idle状态,此时的sd卡为1位sd模式。通过拉低CS线将可使sd进入spi模式(不再讨论范围内),在sd模式下卡的初始化及识别过程见图2.1.1,其步骤如下:
1) 发送CMD0软件复位所有的卡到idle状态。
2) 发送CMD8来检查卡是否支持主机电压(2.7v~3.3v),这个命令在sd2.0以上才被定义,若没有收到回复信号,则可能为sd1.0或MMC卡,若接收到卡回复信号,说明为sd2.0版本卡,跳转到步骤5
3) CMD8没有收到回复信号,可进一步发送ACMD41(CMD55+CMD41),参数HCS位为0(非高容量卡),如果没有回复信号,说明是MMC卡或其它不能识别的卡,可进一步发送CMD1确定是否MMC卡(此处不再分析)
4) ACMD41能收到回复,并且从回复中确定sd卡己准备好,即可确定这是sd1.x版本的卡,若回复中表明sd卡未准备好,则需重复发送ACMD41等待卡准备好,可通过超时(卡一直busy)判断卡不支持主机电压,此时表明卡不可用。判断出sd1.x的卡后,跳转到步骤9
5) CMD8有回复说明为sd2.0以上的卡,从回复中确定卡是否能在该电压下工作,不能则认为卡不可用。
6) 回复中确定卡能在2.7v~3.3v电压工作后,进一步发送ACMD41(CMD55+CMD41),参数HCS位为1表明主机支持高容量的卡
7) 检查ACMD41卡回复中忙标志,若卡处于忙状态,则重复发送ACDM41,直到卡准备好,可通过超时(卡一直忙状态)可认为该卡不可用。
8) ACMD41回复准备好后,再检查回复中的CCS位,该位为1说明是sd2.0高容量sdhc卡,若为0,则说明为sd2.0标准容量卡。
9) 在识别出sd1.x、sd2.0标准卡或sd2.0高容量卡后,此时卡进入ready态。进一步通过CMD2请求卡发送其CID(Card Identification),此时卡进入Identification态。
10) 卡在Identification态后,发送CMD3请求卡发布一个16位新的相对地址(RCA),以后主机与卡之间的点对点通信均会以这个RCA地址来进行,此时卡进入Stand-by态。
11) 至此,卡的初始化及识别过程结束,此时卡进入数据传输模式(data transfer mode)
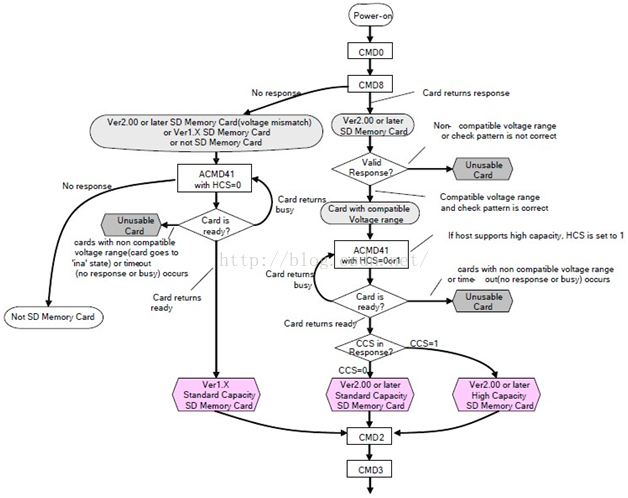
图2.1.1. sd卡初始化及识别流程
2.2. 数据传输模式
sd卡是一个非常典型的状态机,每个状态只会响应该个状态下的特定命令,不要尝试在某个状态下发送这个状态不支持的命令,sd卡不会对该命令进行响应,命令只会超时。应该通过特定的触发条件转变状态或等待状态迁移完成后,再发送对应状态的命令。如图2.2.1,要想写一个块的数据到sd卡,在stand-by态的情况下,必须通过CMD7选择卡,让卡进入transfer态,然后再发送CMD24单块写命令,再发送一块的数据,此时卡进入Programming态,这时如果又紧接发送CMD24进行单块写将不会成功,必须等待sd卡编程完,从Programming态返回到transfer态才能再次接收下一个块写命令。同样,在transfer态想通过CMD9来获得Card-Specific Data(CSD),必须通过CMD7取消选择卡,此时卡进入stand-by态后,即可通过CMD9来获得卡信息。
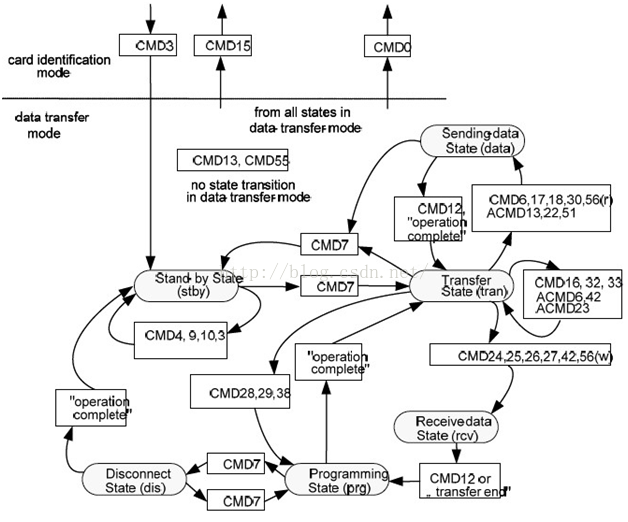
图2.2.1. sd卡数据传输模式
2.3. 主机控制器对卡的初始化
sd卡主机控制器都可以根据sd2.0规范给出的卡初始化及识别流程进行卡的初始化,主机控制器寄存器的设置主要有以下几点,具体的实现可参考Hsmmc_Init()这个初始化函数。
1) 设置功能引脚,把相应引脚配置成sd接口用引脚
2) 设置sd卡时钟在100k~400k,sd卡在识别阶段必须用慢速时钟进行访问
3) 按照规范给出的卡初始化流程对卡进行发送相应的命令并处理回复,成功后卡进入stand-by态
4) 通过发送CMD7选择卡,使卡进入transfer态,因为卡的大部分操作如读、写、擦除等均是在这个状态下来进行的,此时卡已完全准备好接收读写命令了。
5) 设置sd卡的时钟到一个较高值,sd卡默认支持最高25M时钟,对于sd1.1以上标准,可以检查卡是否支持高速模式,若支持则切换到高速模式,最高支持50M,频率越高,数据传输速率越快
6) 通过ACMD6(CMD55+CMD6)来设置sd模式的位宽为4,sd卡初始化后默认是1线宽,更多的数据线将有更大的带宽,数据传输速率最高12.5MB/s(25M、4线)或25MB/s(50M、4线)。
7) 发送CMD16设置块长度,对于标准卡,可通过CMD16来设置块命令(如块读、块写)所操作块的长度(以字节数计),可实现字节的读写,但对于高容量卡这个命令将被忽略,高容量卡一个块的长度均是固定512字节的。通常通过CMD16设置块长度为512字节。至此卡初始化完成。
int Hsmmc_Init(void)
{
int32_t Timeout;
uint32_t Capacity;
uint32_t i;
uint32_t OCR;
uint32_t Temp;
uint8_t SwitchStatus[64];
SD_SCR SCR;
uint8_t CSD[16];
uint32_t c_size, c_size_multi, read_bl_len;
// 设置HSMMC的接口引脚配置
#if (HSMMC_NUM == 0)
// channel 0,GPG0[0:6] = CLK, CMD, CDn, DAT[0:3]
GPG0CON_REG = 0x2222222;
// pull up enable
GPG0PUD_REG = 0x2aaa;
GPG0DRV_REG = 0x3fff;
// channel 0 clock src = SCLKEPLL = 96M
CLK_SRC4_REG = (CLK_SRC4_REG & (~(0xf<<0)))| (0x7<<0);
// channel 0 clock = SCLKEPLL/2 = 48M
CLK_DIV4_REG = (CLK_DIV4_REG & (~(0xf<<0)))| (0x1<<0);
#elif (HSMMC_NUM == 1)
// channel 1,GPG1[0:6] = CLK, CMD, CDn, DAT[0:3]
GPG1CON_REG = 0x2222222;
// pull up enable
GPG1PUD_REG = 0x2aaa;
GPG1DRV_REG = 0x3fff;
// channel 1 clock src = SCLKEPLL = 96M
CLK_SRC4_REG = (CLK_SRC4_REG & (~(0xf<<4)))| (0x7<<4);
// channel 1 clock = SCLKEPLL/2 = 48M
CLK_DIV4_REG = (CLK_DIV4_REG & (~(0xf<<4)))| (0x1<<4);
#elif (HSMMC_NUM == 2)
// channel 2,GPG2[0:6] = CLK, CMD, CDn, DAT[0:3]
GPG2CON_REG = 0x2222222;
// pull up enable
GPG2PUD_REG = 0x2aaa;
GPG2DRV_REG = 0x3fff;
// channel 2 clock src = SCLKEPLL = 96M
CLK_SRC4_REG = (CLK_SRC4_REG & (~(0xf<<8)))| (0x7<<8);
// channel 2 clock = SCLKEPLL/2 = 48M
CLK_DIV4_REG = (CLK_DIV4_REG & (~(0xf<<8)))| (0x1<<8);
#elif (HSMMC_NUM == 3)
// channel 3,GPG3[0:6] = CLK, CMD, CDn, DAT[0:3]
GPG3CON_REG = 0x2222222;
// pull up enable
GPG3PUD_REG = 0x2aaa;
GPG3DRV_REG = 0x3fff;
// channel 3 clock src = SCLKEPLL = 96M
CLK_SRC4_REG = (CLK_SRC4_REG & (~(0xf<<12)))| (0x7<<12);
// channel 3 clock = SCLKEPLL/2 = 48M
CLK_DIV4_REG = (CLK_DIV4_REG & (~(0xf<<12)))| (0x1<<12);
#endif
// software reset for all
__REGb(HSMMC_BASE+SWRST_OFFSET) = 0x1;
Timeout = 1000; // Wait max 10 ms
while (__REGb(HSMMC_BASE+SWRST_OFFSET) &(1<<0)) {
if (Timeout== 0) {
return-1; // reset timeout
}
Timeout--;
Delay_us(10);
}
Hsmmc_SetClock(400000); // 400k
__REGb(HSMMC_BASE+TIMEOUTCON_OFFSET) = 0xe; // 最大超时时间
__REGb(HSMMC_BASE+HOSTCTL_OFFSET) &= ~(1<<2);// 正常速度模式
// 清除正常中断状态标志
__REGw(HSMMC_BASE+NORINTSTS_OFFSET) =__REGw(HSMMC_BASE+NORINTSTS_OFFSET);
// 清除错误中断状态标志
__REGw(HSMMC_BASE+ERRINTSTS_OFFSET) =__REGw(HSMMC_BASE+ERRINTSTS_OFFSET);
__REGw(HSMMC_BASE+NORINTSTSEN_OFFSET) = 0x7fff; //[14:0]中断状态使能
__REGw(HSMMC_BASE+ERRINTSTSEN_OFFSET) = 0x3ff; //[9:0]错误中断状态使能
__REGw(HSMMC_BASE+NORINTSIGEN_OFFSET) = 0x7fff; //[14:0]中断信号使能
__REGw(HSMMC_BASE+ERRINTSIGEN_OFFSET) = 0x3ff; //[9:0]错误中断信号使能
Hsmmc_IssueCommand(CMD0, 0, 0, CMD_RESP_NONE); // 复位所有卡到空闲状态
CardType = UNUSABLE; // 卡类型初始化不可用
// 没有回复,MMC/sd v1.x/notcard
if (Hsmmc_IssueCommand(CMD8, 0x1aa, 0, CMD_RESP_R7)) {
for (i=0;i<100; i++) {
Hsmmc_IssueCommand(CMD55,0, 0, CMD_RESP_R1);
// CMD41有回复说明为sd卡
if(!Hsmmc_IssueCommand(CMD41, 0, 0, CMD_RESP_R3)) {
// 获得回复的OCR(操作条件寄存器)值
OCR = __REG(HSMMC_BASE+RSPREG0_OFFSET);
// 卡上电是否完成上电流程,是否busy
if (OCR& 0x80000000) {
CardType= SD_V1; // 正确识别出sd v1.x卡
Debug("SDcard version 1.x is detected\r\n");
break;
}
} else {
// MMC卡识别
Debug("MMCcard is not supported\r\n");
return-1;
}
Delay_us(1000);
}
} else { // sd v2.0
Temp =__REG(HSMMC_BASE+RSPREG0_OFFSET);
// 判断卡是否支持2.7~3.3v电压
if(((Temp&0xff) == 0xaa) && (((Temp>>8)&0xf) == 0x1)) {
OCR = 0;
for (i=0;i<100; i++) {
OCR |=(1<<30);
Hsmmc_IssueCommand(CMD55,0, 0, CMD_RESP_R1);
Hsmmc_IssueCommand(CMD41,OCR, 0, CMD_RESP_R3); // reday态
OCR =__REG(HSMMC_BASE+RSPREG0_OFFSET);
// 卡上电是否完成上电流程,是否busy
if (OCR& 0x80000000) {
// 判断卡为标准卡还是高容量卡
if (OCR& (1<<30)) {
CardType= SD_HC; // 高容量卡
Debug("SDHCcard is detected\r\n");
} else {
CardType= SD_V2; // 标准卡
Debug("SDversion 2.0 standard card is detected\r\n");
}
break;
}
Delay_us(1000);
}
}
}
if (CardType == SD_HC || CardType == SD_V1 || CardType== SD_V2) {
// 请求卡发送CID(卡ID寄存器)号,进入ident
Hsmmc_IssueCommand(CMD2,0, 0, CMD_RESP_R2);
// 请求卡发布新的RCA(卡相对地址),Stand-by状态
Hsmmc_IssueCommand(CMD3,0, 0, CMD_RESP_R6);
// 从卡回复中得到卡相对地址
RCA =(__REG(HSMMC_BASE+RSPREG0_OFFSET) >> 16) & 0xffff;
// 选择已标记的卡,transfer状态
Hsmmc_IssueCommand(CMD7,RCA<<16, 0, CMD_RESP_R1);
Hsmmc_Get_SCR(&SCR);
if(SCR.SD_SPEC == 0) { // sd 1.0 - sd 1.01
// Version 1.0 doesn't support switching
Hsmmc_SetClock(24000000);// 设置SDCLK = 48M/2 = 24M
} else { //sd 1.10 / sd 2.0
Temp = 0;
for (i=0;i<4; i++) {
// switch check
if(Hsmmc_Switch(0, 0, 1, SwitchStatus) == 0) {
// Group 1, function 1 high-speed bit 273
if(!(SwitchStatus[34] & (1<<1))) {
// Thehigh-speed function is ready
// Group, function 1 high-speed support bit 401
if(SwitchStatus[50] & (1<<1)) {
//high-speed is supported
if(Hsmmc_Switch(1, 0, 1, SwitchStatus) == 0) { // switch
// function switch in group 1 is ok?
if ((SwitchStatus[47]& 0xf) == 1) {
// result of the switch high-speed in function group 1
Debug("Switchto high speed mode: CLK @ 50M\r\n");
Hsmmc_SetClock(48000000);// 设置SDCLK = 48M
Temp= 1;
}
}
}
break;
}
}
}
if (Temp ==0) {
Hsmmc_SetClock(24000000);// 设置SDCLK = 48M/2 = 24M
}
}
if (!Hsmmc_SetBusWidth(4)){
Debug("Setbus width error\r\n");
return-1; // 位宽设置出错
}
// 此时卡应在transfer态
if(Hsmmc_GetCardState() == CARD_TRAN) {
// 设置块长度为512字节
if(!Hsmmc_IssueCommand(CMD16, 512, 0, CMD_RESP_R1)) {
__REGw(HSMMC_BASE+NORINTSTS_OFFSET)= 0xffff; // 清除中断标志
Hsmmc_Get_CSD(CSD);
// CSD v1.0->sd V1.x, sd v2.00 standard
if((CSD[15]>>6) == 0) {
read_bl_len= CSD[10] & 0xf; // [83:80]
c_size_multi= ((CSD[6] & 0x3) << 1) + ((CSD[5] & 0x80) >> 7);
c_size =((int32_t)(CSD[9]&0x3) << 10) + ((int32_t)CSD[8]<<2)
+ (CSD[7]>>6); // [73:62]
Capacity= (c_size + 1) << ((c_size_multi + 2) +
(read_bl_len-9)); // block(512 byte)
} else {
c_size =((CSD[8]&0x3f) << 16) + (CSD[7]<<8) + CSD[6];
// 卡容量为字节(c_size+1)*512Kbyte,以1扇区512 byte字,卡的扇区数为
Capacity= (c_size+1) << 10;// block (512 byte)
}
Debug("CardInitialization succeed\r\n");
Debug("Capacity:%ldMB\r\n", Capacity / (1024*1024 / 512));
return 0;// 初始化成功
}
}
}
Debug("Card Initialization failed\r\n");
return -1; // 卡工作异常
}
2.4. 主机命令的发送
sd规范对命令包格式、回复包、数据的传输方式等均作了详细的要求。虽然sd卡主机控制器可以帮我们对命令进行打包,对回复进行解包,产生CRC,并在sd总线上输出相应的时序。我们仍需要告诉sd卡主机控制器需发送的命令、这个命令的参数、这个命令发送后是否需要使用data线, sd卡的回复类型。这些设置通过主机控制器CMDREG寄存器来实现。主要有以下几点,具体的实现可参考Hsmmc_IssueCommand()这个命令发送函数。
1) 命令发送时,需检查命令线是否已被使用,若是,则等待正在发送的命令发送完才能发送这个命令
2) 如果命令回复会带忙信号(如R1b回复),则需检查数据线是否已被使用,若是,则等待数据线空闲,带忙回复命令发送后,sd卡会拉低DAT[0]线表明sd卡正忙,数据线不可用。
3) 把命令参数写入ARGUMENT这个寄存器中
4) 在CMDREG中设置命令值[13:8]
5) 设置是否需使用data线,如块读、块写等命令发送后,会紧接着在data线上传输数据,其它不需传输数据的命令不要设置使用data线CMDREG[5]
6) 设置sd卡的回复类型,绝大部分命令在sd卡正确响应后,都会对主机进行回复(R1-R7,R1b),每个命令对应的回复类型请参考sd卡规范。回复类型长度可能为136或48,回复中是否包含CRC或命令值的反馈,如果包含,则告诉主控制器检查回复中相应的CRC或命令值反馈是否正确,以确定传输正确。CMDREG设置好后,主控制器就会发送命令并接收设定长度的回复并根据设定检查CRC、命令值反馈是否正确(若回复中包含CRC或命令值反馈的话)
7) 等待命令完成,检查中断状态位NORINTSTS[15]以确定命令是否有错误,若没有错误并且检测到NORINTSTS[0]命令完成位为1,则说明命令发送成功。其它情况说明命令未能成功发送。
2.5. 驱动模块接口
通常对于一个sd卡驱动模块,至少实现卡初始化、块读、块写这三个接口函数。这通常是一个文件系统最基本的底层磁盘接口实现。具体可参考Hsmmc_Init()、Hsmmc_ReadBlock()和Hsmmc_WriteBlock()这三个函数的实现。
3. 附录
Hsmmc.rar,包含sd卡驱动模块实现Hsmmc.c/Hsmmc.h。















 650
650

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









