







‘前言:
所述内容从接触KUKA以来,从各个版本的说明书里总结而来,所述视角为开发者角度,基础操作不做详解,内容如有疑问,欢迎指明,原创不易,还请支持!
目录
-
KUKA机械臂视觉开发涉及的硬件、软件和软件包
-
KUKA.KRL 软件包
-
KUKA .RSI 软件包
-
视觉跟踪上位程序及硬件部署(实例)
1. KUKA机械臂视觉开发涉及的硬件、软件和软件包
KUKA机械臂运动控制由控制柜完成主控,由于KUKA版本迭代较快,控制柜版本将直接影响其软件包的使用,本文以KSS 8.6.10系统,KRC4控制柜进行详解。视觉开发所必需的硬件、软件及软件包包含如下。
1.1 硬件组成
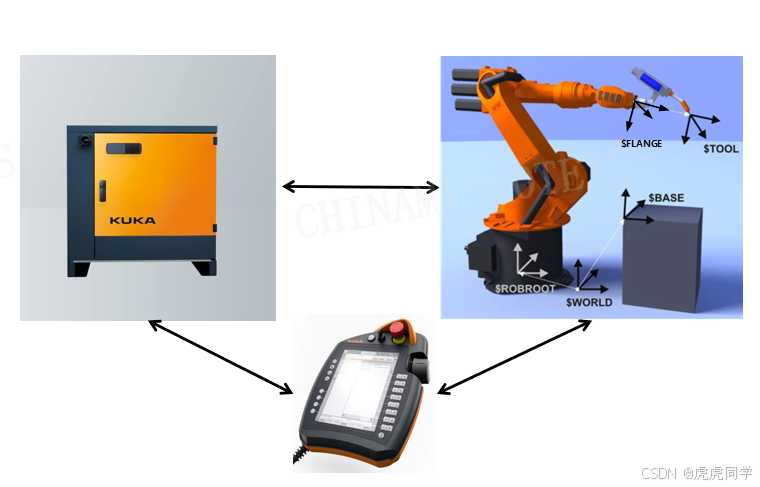
硬件系统由KUKA机械臂系统和视觉系统组成,KUKA机械臂系统硬件组成由机械臂、示教器和控制柜组成,其中控制柜上X32接口用于EMD校准,X11为安全回路接口。视觉系统暂由线激光传感器组成,线激光传感器通常由工业相机和激光发射器构成,刚性固定在机器人末端执行器。通过激光传感器来对机械臂末端位姿运动控制。
配置参数:
控制柜:KRC4 KSS8.6.10
机械臂:16 KR1610
激光传感器:自行选购,可参考Servo-Robot激光传感器
1.2 常用软件和软件包
对于机械臂视觉控制,机器人控制柜需与外部视觉传感器进行数据交互,而KUKA支持TCP和UDP两种通讯协议,对应着两种通讯软件包KRL和RSI(RobotSensorInterface)软件包,KRL通讯通常用于离线跟踪(视觉传感器先扫描提取特征,而后下发给机器人进行跟踪),RSI通讯则用于实时在线控制。
软件:WorkVisual6.0
软件包:(KRL)、RobotSensorInterface4.1(RSI)
软件WorkVisual通过KLI接口直接与控制柜相连通讯,可作为机器人的远程离线上位机,在WorkVisual软件上可读取到机器人整体项目,整体用途如下:
1. 配置XML文件,机器人执行文件src文件等直接机器人编译后发送给控制柜;
2. 可通过IO口映射,使用控制柜里的IO口信号做外部传感器连接;
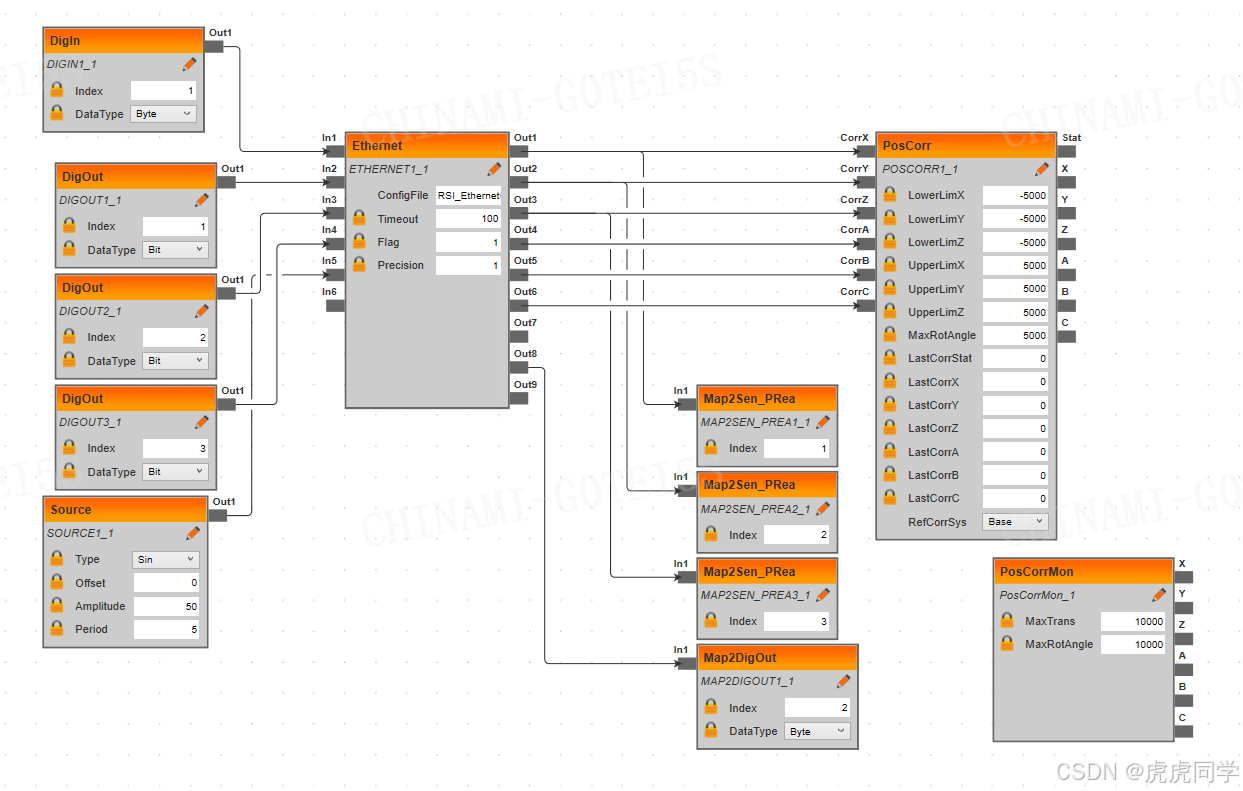
3. 可通过RSIVisual进行RSI上下文的编写,完成机器人端和上位机端位姿数据交互时信号处理(运算,坐标转换和运动控制等)
1.3 坐标系切换读取
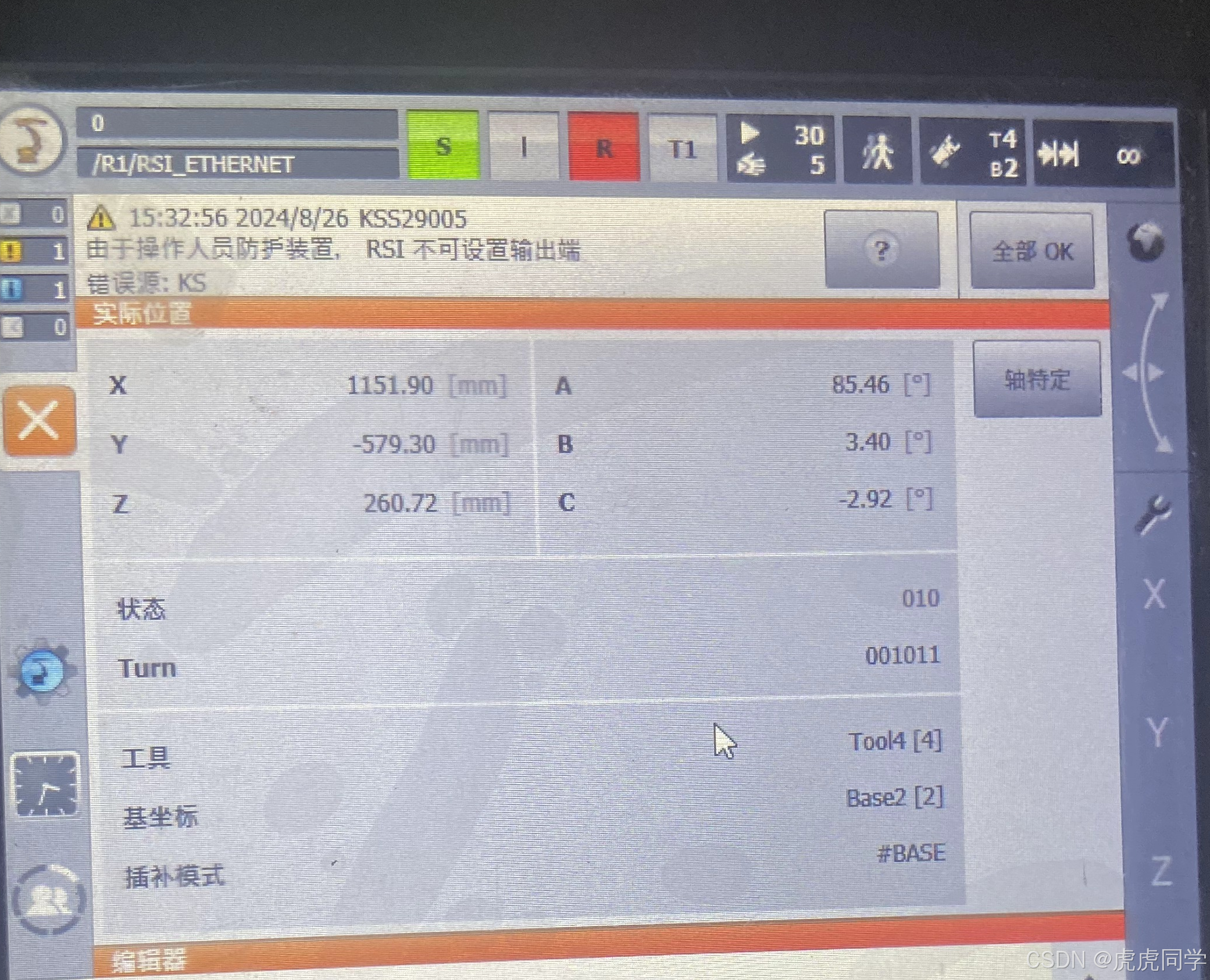
在示教器中可以更改基坐标系(base)和工具坐标系(tool)。示教器右上角如图所示(T4 B2)位置处点击,可以更改显示的坐标系,右侧扳手🔧工具位置处可在基坐标、工具坐标和工件坐标之间切换操作。
-
安全注意事项
当src执行程序编写完成时,建议先手动单步空走一次,而后手动一次执行,最后自动执行(注意:执行速度速度速度!!!!速度可在程序和示教器界面设定)机械臂存在两种急停按钮,一个位于示教器屏幕位置处红色旋钮,紧急情况下可直接按下,一个位于控制柜位置,紧急情况下可直接断电关机



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









