






欧姆龙 发那科 机器人 通信程序
CP1H EIP21 与FANUC通信 Ethernet/IP
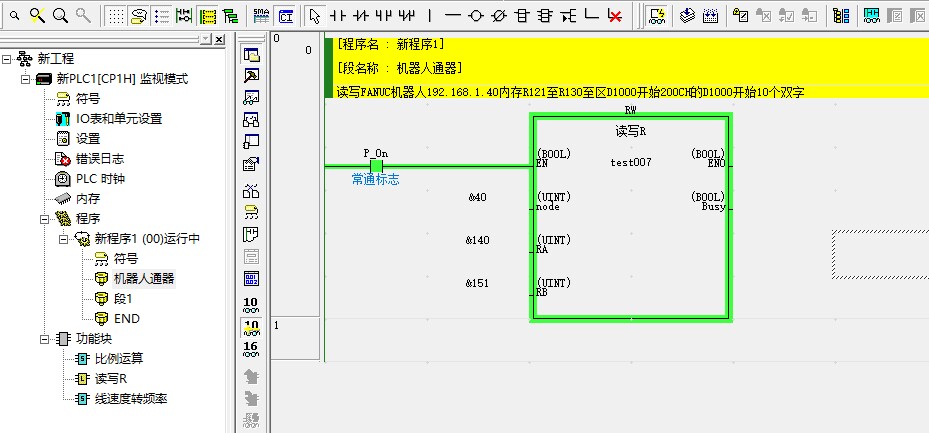
已经做在功能块里,配置一下起始值结束值,节点就能连接成功。
例如连接了R1至R5在PLC中D1至D5
数值可以在机器人改也可以在PLC改,可以一个一个改也可以批量改。
本功能块逻辑严密,使用栈堆优先通信,实时性高。
ID:2850620029249077
用户_41377851


欧姆龙 发那科 机器人 通信程序
CP1H EIP21 与FANUC通信 Ethernet IP
在工业自动化领域,机器人与PLC之间的通信是非常重要的一环。本文将针对欧姆龙的CP1H EIP21与FANUC机器人之间的通信进行详细分析和讨论。
首先,我们需要在CP1H EIP21中配置起始值和结束值,以建立与FANUC机器人的连接。例如,我们可以连接R1至R5节点与PLC中的D1至D5节点。这样,我们就可以通过该功能块进行数据的传输和交互。
在通信过程中,数值可以在机器人或PLC中进行改变。可以逐个修改数值,也可以批量修改。这使得数据的调整和修改变得非常灵活和方便。
为了保证通信的稳定和可靠性,本功能块采用了严密的逻辑设计,并使用了栈堆优先通信。这种设计使得通信的实时性得到了极大的提升,确保了数据传输的时效性。
值得一提的是,本功能块不仅仅是一种通信工具,它还具备了其他的技术优势。例如,它可以与其他的欧姆龙设备和系统进行无缝的集成,实现数据的共享和互通。此外,它还支持多种通信协议和接口,为用户提供了更加丰富和多样化的选择。
总结起来,欧姆龙CP1H EIP21与FANUC机器人之间的通信功能块是一种非常强大和灵活的通信工具。它通过简单的配置过程,实现了机器人与PLC之间的数据传输和交互。同时,它还具备严密的逻辑设计和高实时性特点,保证了通信的稳定和可靠性。通过与其他欧姆龙设备的集成,它还能进一步扩展其功能和应用场景。相信随着工业自动化的发展,这种通信技术将在更多的领域得到应用和推广。
相关的代码,程序地址如下:http://imgcs.cn/620029249077.html

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









