





硬件平台:FL2440
主机平台:Ubuntu 11.04
交叉编译器:arm-linux-gcc 4.3.2
原创作品,转载请标明出处http://blog.csdn.net/yming0221/article/details/6604616
本来是想移植最新的内核2.6.39但是总是在编译快完成的时候报错,有人说是新的内核对arm平台的支持不好,所以就降低了一下版本,这里移植2.6.35.4内核
一、准备工作

下载arm-linux-gcc 4.3.2,然后安装并配置环境变量
最后执行arm-linux-gcc -v查看
二、移植
3、增加devfs文件管理器的支持
我们所用的文件系统使用的是devfs文件管理器。修改fs/Kconfig,
找到
menu "Pseudo filesystems"
添加如下语句:
config DEVFS_FS
bool "/dev file system support (OBSOLETE)"
default y
config DEVFS_MOUNT
bool "Automatically mount at boot"
default y
depends on DEVFS_FS
帮助理解:Kconfig就是对应着内核的配置菜单。假如要想添加新的驱动到内核的源码中,能够修改Kconfig,
这样就能够选择这个驱动,假如想使这个驱动被编译,要修改Makefile。
4、修改晶振频率(可解决打印信息乱码问题)
文件:arch/arm/mach-s3c2440/mach-smdk2440.c
/*s3c24xx_init_clocks(16934400);*/s3c24xx_init_clocks(12000000);
5、修改MTD分区
static struct mtd_partition smdk_default_nand_part[] = { [0] = { .name = "Boot", .size = 0x00100000, .offset = 0 }, [1] = { .name = "MyApp", .size = 0x003c0000, .offset = 0x00140000, }, [2] = { .name = "Kernel", .size = 0x00300000, .offset = 0x00500000, }, [3] = { .name = "fs_yaffs", .size = 0x0f000000, //240M .offset = 0x00800000, }, /*[4] = { .name = "WINCE", .size = 0x03c00000, .offset = 0x04400000, } */ };
具体参考 http://blog.csdn.net/yming0221/article/details/6566551
6、关闭ECC校验
文件:drivers/mtd/nand/s3c2410.c
函数:s3c2410_nand_init_chip
/*chip->ecc.mode = NAND_ECC_SOFT; */chip->ecc.mode = NAND_ECC_NONE;
问题:关于ECC:ECC是“Error Correcting Code”的简写,中文名称是“错误检查和纠正”。ECC是一种能够实现
“错误检查和纠正”的技术,ECC内存就是应用了这种技术的内存,一般多应用在服务器及图形工作站上,这将使整个
电脑系统在工作时更趋于安全稳定。此处为避免容易出错,将ECC关闭。
7、修改nandflash驱动,支持K9F1G08的nandflash
修改drivers/mtd/nand下面的nand_bbt.c文件:
static struct nand_bbt_descr largepage_memorybased = { .options = 0, .offs = 0, .len = 1, // 原数值为2,支持2K每页的flash修改为1。K9F1G08,K9F2G08是2k每页的flash .pattern = scan_ff_pattern }; static struct nand_bbt_descr largepage_flashbased = { .options = NAND_BBT_SCAN2NDPAGE, .offs = 0, .len = 1, //原数值为2,支持2K每页的flash修改为1。K9F1G08,K9F2G08是2k每页的flash .pattern = scan_ff_pattern };
8、下面,开始配置内核。
进入linux-2.6.35目录,把s3c2410的默认配置写入config文件。
make s3c2410_defconfig
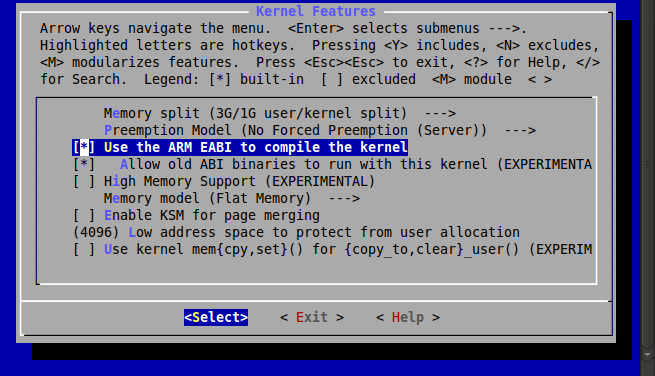
make menuconfig
配置内核特点使用ARM EABI编译
配置文件系统选项
配置yaffs2文件系统
修改配置如下:
File systems --->
[*] Miscellaneous filesystems --->
<*> YAFFS2 file system support
-*- 512 byte / page devices
-*- 2048 byte (or larger) / page devices
[*] Autoselect yaffs2 format
[*] Cache short names in RAM
配置cpu相关选项
修改配置如下:
System Type --->
S3C2440 Machines --->
[*] SMDK2440
[*] SMDK2440 with S3C2440 CPU module
去掉S3C2400 Machines、S3C2410 Machines、S3C2412 Machines、S3C2442 Machines的所有选项,
否则会报错。如果现在编译内核,下载到开发板中,内核就可以正常启动了.有了雏形,继续移植设备驱动。
这里,内核选项*代表编译至内核,M代表编译为模块。
9、移植USB host驱动
在这个版本的linux内核,已经对USB驱动进行来很好的支持,仅仅需要修改配置。
Device Drivers --->
[*] USB support --->
{*} Support for Host-side USB
[*] USB device filesystem (DEPRECATED)
[*] USB device class-devices (DEPRECATED)
<*> OHCI HCD support
<*> USB Mass Storage support
[*] HID Devices --->
{*} Generic HID support
[*] /dev/hidraw raw HID device support
SCSI device support --->
<*> SCSI device support
[*] legacy /proc/scsi/ support
<*> SCSI disk support
<*> SCSI tape support
10、移植RTC驱动
在这个版本的linux内核,已经对RTC驱动进行来很好的支持,不需要修改配置。相应配置如下
Device Drivers --->
<*> Real Time Clock --->
[*] Set system time from RTC on startup and resume
(rtc0) RTC used to set the system time
[ ] RTC debug support
*** RTC interfaces ***
[*] /sys/class/rtc/rtcN (sysfs)
[*] /proc/driver/rtc (procfs for rtc0)
[*] /dev/rtcN (character devices)
<*> Samsung S3C series SoC RTC
然后添加对设备的支持
打开arch/arm/mach-s3c2440/mach-smdk2440.c,添加设备,代码如下:
static struct platform_device *smdk2440_devices[] __initdata = { &s3c_device_ohci, &s3c_device_lcd, &s3c_device_wdt, &s3c_device_i2c0, &s3c_device_iis, &s3c_device_rtc, };
11、移植UDA1341驱动
在平台上添加和配置UDA1341:
修改arch/arm/mach-s3c2440/mach-smdk2440.c,在开始添加头文件
#include <sound/s3c24xx_uda134x.h>
#include <mach/gpio-fns.h>
static struct s3c24xx_uda134x_platform_data s3c24xx_uda134x_data = { .l3_clk = S3C2410_GPB(4), .l3_data = S3C2410_GPB(3), .l3_mode = S3C2410_GPB(2), .model = UDA134X_UDA1341, }; static struct platform_device s3c24xx_uda134x = { .name = "s3c24xx_uda134x", .dev = { .platform_data = &s3c24xx_uda134x_data, } };
把设备添加到平台当中 static struct platform_device *smdk2440_devices[] __initdata = { &s3c_device_ohci, &s3c_device_lcd, &s3c_device_wdt, &s3c_device_i2c0, &s3c_device_iis, &s3c_device_rtc, &s3c24xx_uda134x, };
内核配置如下
Device Drivers --->
<*> Sound card support --->
<*> Advanced Linux Sound Architecture --->
<*> OSS Mixer API
<*> OSS PCM (digital audio) API
[*] OSS PCM (digital audio) API - Include plugin system
[*] Support old ALSA API
[*] Verbose procfs contents
[*] Verbose printk
[*] Generic sound devices --->
<*> ALSA for SoC audio support --->
<*> SoC Audio for the Samsung S3C24XX chips
<*> SoC I2S Audio support UDA134X wired to a S3C24XX
12、移植DM9000驱动
a、修改drivers/net/dm9000.c文件:
头文件增加:
#include <mach/regs-gpio.h>
#include <mach/irqs.h>
#include <mach/hardware.h>
在dm9000_probe函数开始增加:
unsigned char ne_def_eth_mac_addr[]={0x00,0x12,0x34,0x56,0x80,0x49}; static void *bwscon; static void *gpfcon; static void *extint0; static void *intmsk; #define BWSCON (0x48000000) #define GPFCON (0x56000050) #define EXTINT0 (0x56000088) #define INTMSK (0x4A000008) bwscon=ioremap_nocache(BWSCON,0x0000004); gpfcon=ioremap_nocache(GPFCON,0x0000004); extint0=ioremap_nocache(EXTINT0,0x0000004); intmsk=ioremap_nocache(INTMSK,0x0000004); writel(readl(bwscon)|0xc0000,bwscon); writel( (readl(gpfcon) & ~(0x3 << 14)) | (0x2 << 14), gpfcon); writel( readl(gpfcon) | (0x1 << 7), gpfcon); // Disable pull-up writel( (readl(extint0) & ~(0xf << 28)) | (0x4 << 28), extint0); //rising edge writel( (readl(intmsk)) & ~0x80, intmsk);
在这个函数的最后需要修改:
if (!is_valid_ether_addr(ndev->dev_addr)) { /* try reading from mac */ mac_src = "chip"; for (i = 0; i < 6; i++) //ndev->dev_addr[i] = ior(db, i+DM9000_PAR); ndev->dev_addr[i] = ne_def_eth_mac_addr[i]; } b、修改arch/arm/mach-s3c2440/mach-smdk2440.c,添加设备 static struct platform_device *smdk2440_devices[] __initdata = { &s3c_device_ohci, &s3c_device_lcd, &s3c_device_wdt, &s3c_device_i2c0, &s3c_device_iis, &s3c_device_rtc, &s3c24xx_uda134x, &s3c_device_dm9000, };
c、修改arch/arm/plat-s3c24xx/devs.c
添加头文件
#include <linux/dm9000.h>
添加以下代码
static struct resource s3c_dm9000_resource[] = { [0] = { .start = S3C24XX_PA_DM9000, .end = S3C24XX_PA_DM9000+ 0x3, .flags = IORESOURCE_MEM }, [1]={ .start = S3C24XX_PA_DM9000 + 0x4, //CMD pin is A2 .end = S3C24XX_PA_DM9000 + 0x4 + 0x7c, .flags = IORESOURCE_MEM }, [2] = { .start = IRQ_EINT7, .end = IRQ_EINT7, .flags = IORESOURCE_IRQ }, }; static struct dm9000_plat_data s3c_device_dm9000_platdata = { .flags= DM9000_PLATF_16BITONLY, }; struct platform_device s3c_device_dm9000 = { .name= "dm9000", .id= 0, .num_resources= ARRAY_SIZE(s3c_dm9000_resource), .resource= s3c_dm9000_resource, .dev= { .platform_data = &s3c_device_dm9000_platdata, } }; EXPORT_SYMBOL(s3c_device_dm9000); d、修改arch/arm/plat-sumsung/include/plat/devs.h 45行附近, 添加
e、修改arch/arm/mach-s3c2410/include/mach/map.h文件
/* DM9000 */
#define S3C24XX_PA_DM9000 0x20000300
#define S3C24XX_VA_DM9000 0xE0000000
13、启动画面显示小企鹅的方法
配置内核,下面是必选项
Device Drivers--->
Graphics support --->
<*> Support for frame buffer devices
<*> S3C2410 LCD framebuffer support ,multi support!
Console display driver support --->
<*> Framebuffer Console support
Logo configuration --->
[*] Bootup logo
[*] Standard 224-color Linux logo
14、3.5寸LCD显示的移植
2.6.34内核中已经支持
15、修改uart2为普通串口以及测试程序
修改arch/arm/mach-s3c2440/mach-smdk2440.c中的uart2的配置,修改后如下:
static struct s3c2410_uartcfg smdk2440_uartcfgs[] __initdata = { [0] = { .hwport = 0, .flags = 0, .ucon = 0x3c5, .ulcon = 0x03, .ufcon = 0x51, }, [1] = { .hwport = 1, .flags = 0, .ucon = 0x3c5, .ulcon = 0x03, .ufcon = 0x51, }, /* IR port */ [2] = { .hwport = 2, .flags = 0, .ucon = 0x3c5, .ulcon = 0x03,/*fatfish 0x43*/ .ufcon = 0x51, } };
在drivers/serial/samsung.c中添加对uart2控制器的配置,配置为普通串口。
添加头文件:
#include <linux/gpio.h>
#include <mach/regs-gpio.h>
在static int s3c24xx_serial_startup(struct uart_port *port)函数中,添加
if (port->line == 2) { s3c2410_gpio_cfgpin(S3C2410_GPH(6), S3C2410_GPH6_TXD2); s3c2410_gpio_pullup(S3C2410_GPH(6), 1); s3c2410_gpio_cfgpin(S3C2410_GPH(7), S3C2410_GPH7_RXD2); s3c2410_gpio_pullup(S3C2410_GPH(7), 1); }
16、移植看门狗
修改配置
Device Drivers --->
[*] Watchdog Timer Support --->
<*> S3C2410 Watchdog
最后:make zImage
最后编译出来的zImage就2.1M左右。

不过,此时,显示屏显示还有点问题,出现上下两栏。解决方法如下:
修改mach-smdk2440.c中
static struct s3c2410fb_display smdk2440_lcd_cfg __initdata = { /* Config for 320x240 LCD */ .lcdcon5 = S3C2410_LCDCON5_FRM565 | S3C2410_LCDCON5_INVVLINE | S3C2410_LCDCON5_INVVFRAME | S3C2410_LCDCON5_PWREN | S3C2410_LCDCON5_HWSWP, .type = S3C2410_LCDCON1_TFT, .width = 320, .height = 240, .pixclock = 270000, .xres = 320, .yres = 240, .bpp = 16, .left_margin =8, .right_margin = 5, .hsync_len = 63, .upper_margin = 15, .lower_margin = 3, .vsync_len = 5, };
并且将.lpcsel = ((0xCE6) & ~7) | 1<<4,注释掉
static struct s3c2410fb_mach_info smdk2440_fb_info __initdata = { .displays = &smdk2440_lcd_cfg, .num_displays = 1, .default_display = 0, #if 0 /* currently setup by downloader */ .gpccon = 0xaa940659, .gpccon_mask = 0xffffffff, .gpcup = 0x0000ffff, .gpcup_mask = 0xffffffff, .gpdcon = 0xaa84aaa0, .gpdcon_mask = 0xffffffff, .gpdup = 0x0000faff, .gpdup_mask = 0xffffffff, #endif //.lpcsel = ((0xCE6) & ~7) | 1<<4, };重新编译即可。
至此,2.6.35.4内核移植成功。















 1098
1098

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









