一、基本术语
图:由有穷、非空点集和边集合组成,简写成G(V,E);
Vertex:图中的顶点;
无向图:图中每条边都没有方向;
有向图:图中每条边都有方向;
无向边:边是没有方向的,写为(a,b)
有向边:边是有方向的,写为<a,b>
有向边也成为弧;开始顶点称为弧尾,结束顶点称为弧头;
简单图:不存在指向自己的边、不存在两条重复的边的图;
无向完全图:每个顶点之间都有一条边的无向图;
有向完全图:每个顶点之间都有两条互为相反的边的无向图;
稀疏图:边相对于顶点来说很少的图;
稠密图:边很多的图;
权重:图中的边可能会带有一个权重,为了区分边的长短;
网:带有权重的图;
度:与特定顶点相连接的边数;
出度、入度:对于有向图的概念,出度表示此顶点为起点的边的数目,入度表示此顶点为终点的边的数目;
环:第一个顶点和最后一个顶点相同的路径;
简单环:除去第一个顶点和最后一个顶点后没有重复顶点的环;
连通图:任意两个顶点都相互连通的图;
极大连通子图:包含竟可能多的顶点(必须是连通的),即找不到另外一个顶点,使得此顶点能够连接到此极大连通子图的任意一个顶点;
连通分量:极大连通子图的数量;
强连通图:此为有向图的概念,表示任意两个顶点a,b,使得a能够连接到b,b也能连接到a 的图;
生成树:n个顶点,n-1条边,并且保证n个顶点相互连通(不存在环);
最小生成树:此生成树的边的权重之和是所有生成树中最小的;
AOV网:结点表示活动的网;
AOE网:边表示活动的持续时间的网;
二、图的存储结构
1.邻接矩阵
维持一个二维数组,arr[i][j]表示i到j的边,如果两顶点之间存在边,则为1,否则为0;
维持一个一维数组,存储顶点信息,比如顶点的名字;
下图为一般的有向图:
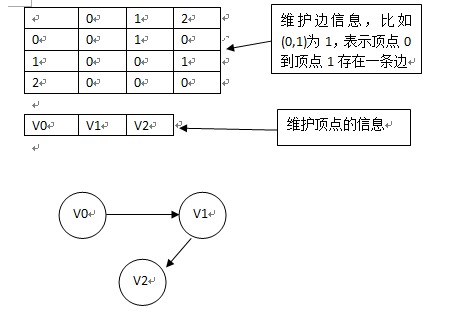
注意:如果我们要看vi节点邻接的点,则只需要遍历arr[i]即可;
下图为带有权重的图的邻接矩阵表示法:
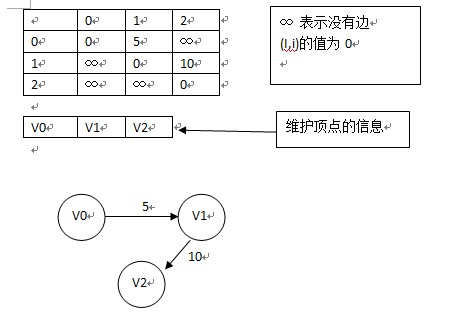
缺点:邻接矩阵表示法对于稀疏图来说不合理,因为太浪费空间;
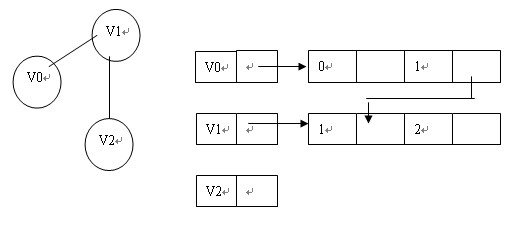
2.邻接表
如果图示一般的图,则如下图:
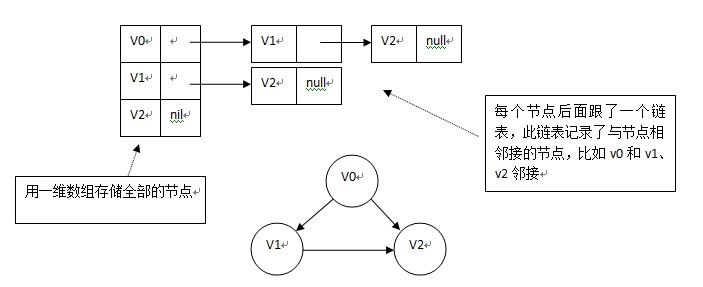
如果是网,即边带有权值,则如下图:

3.十字链表
只针对有向图;,适用于计算出度和入度;
顶点结点:
边结点:
好处:创建的时间复杂度和邻接链表相同,但是能够同时计算入度和出度;
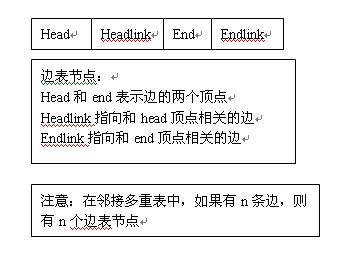
4.邻接多重表
针对无向图; 如果我们只是单纯对节点进行操作,则邻接表是一个很好的选择,但是如果我们要在邻接表中删除一条边,则需要删除四个顶点(因为无向图);
在邻接多重表中,只需要删除一个节点,即可完成边的删除,因此比较方便;
因此邻接多重表适用于对边进行删除的操作;
顶点节点和邻接表没区别,边表节点如下图:
比如:
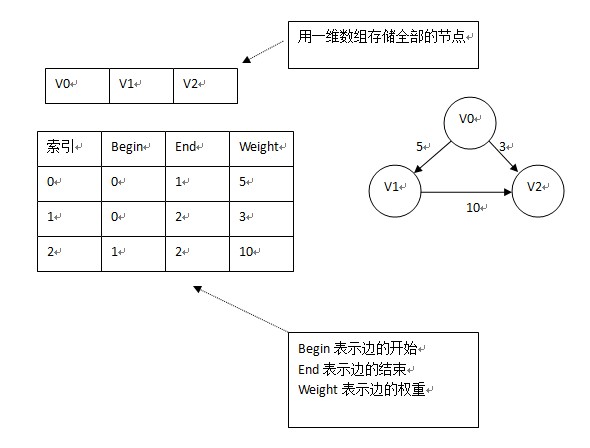
5.边集数组
适合依次对边进行操作;
存储边的信息,如下图:
三、图的遍历
DFS
思想:往深里遍历,如果不能深入,则回朔;
比如:
/** * O(v+e) */ @Test public void DFS() { for (int i = 0; i < g.nodes.length; i++) { if (!visited[i]) { DFS_Traverse(g, i); } } } private void DFS_Traverse(Graph2 g, int i) { visited[i] = true; System.out.println(i); EdgeNode node = g.nodes[i].next; while (node != null) { if (!visited[node.idx]) { DFS_Traverse(g, node.idx); } node = node.next; } }
BFS
思想:对所有邻接节点遍历;
/** * O(v+e) */ @Test public void BFS() { ArrayList<Integer> list = new ArrayList<Integer>(); for (int i = 0; i < g.nodes.length; i++) { if (!visited[i]) { visited[i] = true; list.add(i); System.out.println(i); while (!list.isEmpty()) { int k = list.remove(0); EdgeNode current = g.nodes[k].next; while (current != null) { if (!visited[current.idx]) { visited[current.idx] = true; System.out.println(current.idx); list.add(current.idx); } current = current.next; } } } } }
四、最小生成树
prim
邻接矩阵存储;
/** * 时间复杂度为O(n^2) * 适用于稠密图 */ @Test public void prim(){ int cost[] = new int[9]; int pre[] = new int[9]; for(int i=0;i<g1.vertex.length;i++){ cost[i] = g1.adjMatrix[0][i]; } cost[0] = 0; for(int i=1;i<g1.vertex.length;i++){ int min = 65536; int k = 0; for(int j=1;j<g1.vertex.length;j++){ if(cost[j]!=0&&cost[j]<min){ min = cost[j]; k = j; } } cost[k] = 0; System.out.println(pre[k]+","+k); for(int j=1;j<g1.vertex.length;j++){ if(cost[j]!=0&&g1.adjMatrix[k][j]<cost[j]){ pre[j] = k; cost[j] = g1.adjMatrix[k][j]; } } } }
krustral
边集数组存储;
/** * 时间复杂度:O(eloge) * 适用于稀疏图 */ @Test public void krustral(){ Edge[] edges = initEdges(); int parent[] = new int[9]; for(int i=0;i<edges.length;i++){ Edge edge = edges[i]; int m = find(parent,edge.begin); int n = find(parent,edge.end); if(m!=n){ parent[m] = n; System.out.println(m+","+n); } } } private static int find(int[] parent, int f) { while (parent[f] > 0) { f = parent[f]; } return f; }
五、最短路径
dijkstra算法
邻接矩阵存储;
//O(n^2) @Test public void Dijkstra(){ int distance[] = new int[9]; int pre[] = new int[9]; boolean finished[] = new boolean[9]; finished[0] = true; for(int i=0;i<9;i++){ distance[i] = g1.adjMatrix[0][i]; } int k = 0; for(int i=1;i<9;i++){ int min = 65536; for(int j=0;j<9;j++){ if(!finished[j]&&distance[j]<min){ min = distance[j]; k = j; } } finished[k] = true; System.out.println(pre[k]+","+k); for(int j=1;j<9;j++){ if(!finished[j]&&(min+g1.adjMatrix[k][j])<distance[j]){ distance[j] = min+g1.adjMatrix[k][j]; pre[j] = k; } } } }
Floyd
使用:
(1)邻接矩阵:存储图;
/** * O(n^3) * 求出任意顶点之间的距离 */ @Test public void floyd(Graph1 g) { int i, j, k; int length = g.vertex.length; int dist[][] = new int[length][length]; int pre[][] = new int[length][length]; for (i = 0; i < g.vertex.length; i++) { for (j = 0; j < g.vertex.length; j++) { pre[i][j] = j; dist[i][j] = g.adjMatrix[i][j]; } } for (i = 0; i < length; i++) { for (j = 0; j < g.vertex.length; j++) { for (k = 0; k < g.vertex.length; k++) { if (dist[i][j] > dist[i][k] + dist[k][j]) { dist[i][j] = dist[i][k] + dist[k][j]; pre[i][j] = pre[i][k]; } } } } System.out.println(); }
六、拓扑排序
使用数据结构:
(1)栈:用来存放入度为0的节点;
(2)变种邻接列表:作为图的存储结构;此邻接列表的顶点节点还需要存放入度属性;
/** * O(n+e) */ private static String topologicalSort(Graph2 g2) { Stack<Integer> s = new Stack<Integer>(); int count = 0; for(int i=0;i<g2.nodes.length;i++){ if(g2.nodes[i].indegree==0){ s.push(i); } } while(!s.isEmpty()){ int value = s.pop(); System.out.println(value+"、"); count++; EdgeNode node = g2.nodes[value].next; while(node!=null){ g2.nodes[node.idx].indegree--; if(g2.nodes[node.idx].indegree==0){ s.push(node.idx); } node = node.next; } } if(count<g2.nodes.length){ return "error"; } return "ok"; }
七、关键路径
使用数据结构:
(1)变种邻接列表:同拓扑排序;
(2)变量:
ltv表示某个事件的最晚开始时间;
etv表示事件最早开始时间;
ete表示活动最早开始时间;
lte表示活动最晚开始时间;
//O(n+e)
@Test public void CriticalPath(){ Stack<Integer> stack = topological_etv(); int length = stack.size(); if(stack==null){ return ; } else{ int[]ltv = new int[length]; for(int i=0;i<stack.size();i++){ ltv[i] = etv[stack.size()-1]; } //从拓扑排序的最后开始计算ltv while(!stack.isEmpty()){ int top = stack.pop(); EdgeNode current = g.nodes[top].next; while(current!=null){ int idx = current.idx; //最晚发生时间要取所有活动中最早的 if((ltv[idx]-current.weight)<ltv[top]){ ltv[top] = ltv[idx]-current.weight; } } } int ete = 0; int lte = 0; for(int j=0;j<length;j++){ EdgeNode current = g.nodes[j].next; while(current!=null){ int idx = current.idx; ete = etv[j]; lte = ltv[idx]-current.weight; if(ete==lte){ //是关键路径 } } } } } private Stack<Integer> topological_etv(){ Stack<Integer> stack2 = new Stack<Integer>(); Stack<Integer>stack1 = new Stack<Integer>(); for(int i=0;i<g.nodes.length;i++){ if(g.nodes[i].indegree==0){ stack1.add(i); } } etv[] = new int[g.nodes.length]; int count = 0; while(!stack1.isEmpty()){ int top = stack1.pop(); count++; stack2.push(top); EdgeNode current = g.nodes[top].next; while(current!=null){ int idx = current.idx; if((--g.nodes[idx].indegree)==0){ stack1.push(idx); } if((etv[top]+current.weight)>etv[idx]){ etv[idx] = etv[top]+current.weight; } current = current.next; } } if(count<g.nodes.length){ return null; } return stack2; }





















 613
613

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









