





努力成为linux kernel hacker的人李万鹏原创作品,为梦而战。转载请标明出处
http://blog.csdn.net/woshixingaaa/archive/2011/05/21/6436215.aspx
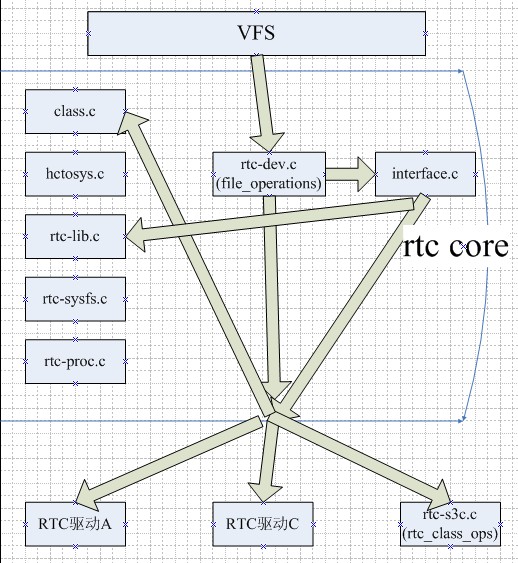
RTC(实时时钟)是一种典型的字符设备,作为一种字符设备驱动,RTC需要有file_operations中接口函数的实现,如open(),release(),read(),poll(),ioctl()等,而典型的ioctl包括RTC_SET_TIME,RTC_ALM_READ,RTC_ALM_SET,RTC_IRQP_SET,RTC_IRQP_READ等,这些对于所有的RTC是通用的,只有底层的具体实现是设备相关的。如下图可以清楚看出RTC子系统的框架。
下面介绍几个重要的数据结构:
rtc_device用来描述rtc设备:
struct rtc_device { struct device dev; struct module *owner; int id; //RTC设备的次设备号 char name[RTC_DEVICE_NAME_SIZE]; const struct rtc_class_ops *ops; struct mutex ops_lock; struct cdev char_dev; unsigned long flags; unsigned long irq_data; spinlock_t irq_lock; wait_queue_head_t irq_queue; struct fasync_struct *async_queue; struct rtc_task *irq_task; spinlock_t irq_task_lock; int irq_freq; int max_user_freq; #ifdef CONFIG_RTC_INTF_DEV_UIE_EMUL struct work_struct uie_task; struct timer_list uie_timer; /* Those fields are protected by rtc->irq_lock */ unsigned int oldsecs; unsigned int uie_irq_active:1; unsigned int stop_uie_polling:1; unsigned int uie_task_active:1; unsigned int uie_timer_active:1; #endif };
rtc_time用于get time/set time:
struct rtc_time { int tm_sec; int tm_min; int tm_hour; int tm_mday; int tm_mon; int tm_year; int tm_wday; int tm_yday; int tm_isdst; };
描述报警状态的结构:
struct rtc_wkalrm { unsigned char enabled; /* 0 = alarm disabled, 1 = alarm enabled */ unsigned char pending; /* 0 = alarm not pending, 1 = alarm pending */ struct rtc_time time; /* time the alarm is set to */ };
struct rtc_class_ops { int (*open)(struct device *); //打开设备时的回调函数,这个函数应该初始化硬件并申请资源 void (*release)(struct device *); //这个函数是设备关闭时被调用的,应该注销申请的资源 int (*ioctl)(struct device *, unsigned int, unsigned long); //ioctl函数,对想让RTC自己实现的命令应返回ENOIOCTLCMD int (*read_time)(struct device *, struct rtc_time *); //读取时间 int (*set_time)(struct device *, struct rtc_time *); //设置时间 int (*read_alarm)(struct device *, struct rtc_wkalrm *); //读取下一次定时中断的时间 int (*set_alarm)(struct device *, struct rtc_wkalrm *); //设置下一次定时中断的时间 int (*proc)(struct device *, struct seq_file *); //procfs接口 int (*set_mmss)(struct device *, unsigned long secs); //将传入的参数secs转换为struct rtc_time然后调用set_time函数。程序员可以不实现这个函数,但 前提是定义好了read_time/set_time,因为RTC框架需要用这两个函数来实现这个功能。 int (*irq_set_state)(struct device *, int enabled); //周期采样中断的开关,根据enabled的值来设置 int (*irq_set_freq)(struct device *, int freq); //设置周期中断的频率 int (*read_callback)(struct device *, int data); ///用户空间获得数据后会传入读取的数据,并用这个函数返回的数据更新数据。 int (*alarm_irq_enable)(struct device *, unsigned int enabled); //alarm中断使能开关,根据enabled的值来设置 int (*update_irq_enable)(struct device *, unsigned int enabled); //更新中断使能开关,根据enabled的值来设置 };
现在来看看rtc子系统是怎么注册上的:
static int __init rtc_init(void) { rtc_class = class_create(THIS_MODULE, "rtc"); if (IS_ERR(rtc_class)) { printk(KERN_ERR "%s: couldn't create class\n", __FILE__); return PTR_ERR(rtc_class); } rtc_class->suspend = rtc_suspend; rtc_class->resume = rtc_resume; rtc_dev_init(); rtc_sysfs_init(rtc_class); return 0; } void __init rtc_dev_init(void) { int err; err = alloc_chrdev_region(&rtc_devt, 0, RTC_DEV_MAX, "rtc"); if (err < 0) printk(KERN_ERR "%s: failed to allocate char dev region\n", __FILE__); }
在class.c文件函数rtc_init中生成rtc类,然后调用rtc-dev.c文件中的rtc_dev_init分配设备号。
在rtc-dev.c中声明了file_operations,因为rtc也是一个字符设备:
static const struct file_operations rtc_dev_fops = { .owner = THIS_MODULE, .llseek = no_llseek, .read = rtc_dev_read, .poll = rtc_dev_poll, .unlocked_ioctl = rtc_dev_ioctl, .open = rtc_dev_open, .release = rtc_dev_release, .fasync = rtc_dev_fasync, };
下面来分析rtc-s3c.c源码:
首先看模块的注册和撤销:
static int __init s3c_rtc_init(void) { printk(banner); return platform_driver_register(&s3c2410_rtc_driver); } static void __exit s3c_rtc_exit(void) { platform_driver_unregister(&s3c2410_rtc_driver); }
从上边的代码可以看出rtc driver作为platform_driver注册进内核,挂在platform_bus上。
static struct platform_driver s3c2410_rtc_driver = { .probe = s3c_rtc_probe, //rtc探测函数 .remove = __devexit_p(s3c_rtc_remove), //rtc移除函数 .suspend = s3c_rtc_suspend, //rtc挂起函数 .resume = s3c_rtc_resume, //rtc恢复函数 .driver = { .name = "s3c2410-rtc", //注意这里的名字一定要和系统中定义平台设备的地方一致,这样才能把平台设备和平台驱动关联起来 .owner = THIS_MODULE, }, };
在arch/arm/plat-s3c24xx/devs.c中定义了rtc的platform_device:
/* RTC */ static struct resource s3c_rtc_resource[] = { //定义了rtc平台设备会使用的资源 [0] = { //IO端口资源范围 .start = S3C24XX_PA_RTC, .end = S3C24XX_PA_RTC + 0xff, .flags = IORESOURCE_MEM, }, [1] = { //RTC报警中断资源 .start = IRQ_RTC, .end = IRQ_RTC, .flags = IORESOURCE_IRQ, }, [2] = { //TICK节拍时间中断资源 .start = IRQ_TICK, .end = IRQ_TICK, .flags = IORESOURCE_IRQ } }; struct platform_device s3c_device_rtc = { //定义了平台设备 .name = "s3c2410-rtc", //设备名 .id = -1, .num_resources = ARRAY_SIZE(s3c_rtc_resource), //资源数量 .resource = s3c_rtc_resource, //引用上面定义的资源 };
平台驱动中定义了probe函数,下面来看他的实现:
static int __devinit s3c_rtc_probe(struct platform_device *pdev) { struct rtc_device *rtc; struct resource *res; int ret; pr_debug("%s: probe=%p\n", __func__, pdev); /* find the IRQs */ /*获得IRQ资源中的第二个,即TICK节拍时间中断号*/ s3c_rtc_tickno = platform_get_irq(pdev, 1); if (s3c_rtc_tickno < 0) { dev_err(&pdev->dev, "no irq for rtc tick\n"); return -ENOENT; } /*获取IRQ资源中的第一个,即RTC报警中断*/ s3c_rtc_alarmno = platform_get_irq(pdev, 0); if (s3c_rtc_alarmno < 0) { dev_err(&pdev->dev, "no irq for alarm\n"); return -ENOENT; } pr_debug("s3c2410_rtc: tick irq %d, alarm irq %d\n", s3c_rtc_tickno, s3c_rtc_alarmno); /* get the memory region */ /*获取RTC平台设备所使用的IO端口资源*/ res = platform_get_resource(pdev, IORESOURCE_MEM, 0); if (res == NULL) { dev_err(&pdev->dev, "failed to get memory region resource\n"); return -ENOENT; } /*申请IO端口资源所占用的IO空间*/ s3c_rtc_mem = request_mem_region(res->start, res->end-res->start+1, pdev->name); if (s3c_rtc_mem == NULL) { dev_err(&pdev->dev, "failed to reserve memory region\n"); ret = -ENOENT; goto err_nores; } /*将IO端口占用的IO空间映射到虚拟地址,s3c_rtc_base是这段虚拟地址的起始地址*/ s3c_rtc_base = ioremap(res->start, res->end - res->start + 1); if (s3c_rtc_base == NULL) { dev_err(&pdev->dev, "failed ioremap()\n"); ret = -EINVAL; goto err_nomap; } /* check to see if everything is setup correctly */ /*对RTCCON第0位进行操作,使能RTC*/ s3c_rtc_enable(pdev, 1); pr_debug("s3c2410_rtc: RTCCON=%02x\n", readb(s3c_rtc_base + S3C2410_RTCCON)); /*对TICNT第7位进行操作,使能节拍时间计数寄存器*/ s3c_rtc_setfreq(&pdev->dev, 1); /*让电源管理支持唤醒功能*/ device_init_wakeup(&pdev->dev, 1); /* register RTC and exit */ /*注册rtc设备,名为"s3c",与s3c_rtcops这个rtc_class_ops进行关联*/ rtc = rtc_device_register("s3c", &pdev->dev, &s3c_rtcops, THIS_MODULE); if (IS_ERR(rtc)) { dev_err(&pdev->dev, "cannot attach rtc\n"); ret = PTR_ERR(rtc); goto err_nortc; } /**/ rtc->max_user_freq = 128; /*将rtc这个rtc_device存放在&pdev->dev->driver_data*/ platform_set_drvdata(pdev, rtc); return 0; err_nortc: s3c_rtc_enable(pdev, 0); iounmap(s3c_rtc_base); err_nomap: release_resource(s3c_rtc_mem); err_nores: return ret; }
函数rtc_device_register在文件class.c中实现:
struct rtc_device *rtc_device_register(const char *name, struct device *dev, const struct rtc_class_ops *ops, struct module *owner) { struct rtc_device *rtc; int id, err; /*为idr(rtc_idr)分配内存*/ if (idr_pre_get(&rtc_idr, GFP_KERNEL) == 0) { err = -ENOMEM; goto exit; } mutex_lock(&idr_lock); /*分配ID号存于id中,该ID号最终将作为该RTC设备的次设备号*/ err = idr_get_new(&rtc_idr, NULL, &id); mutex_unlock(&idr_lock); if (err < 0) goto exit; id = id & MAX_ID_MASK; /*为RTC结构分配内存*/ rtc = kzalloc(sizeof(struct rtc_device), GFP_KERNEL); if (rtc == NULL) { err = -ENOMEM; goto exit_idr; } rtc->id = id; /*指向原始操作函数集*/ rtc->ops = ops; rtc->owner = owner; rtc->max_user_freq = 64; rtc->dev.parent = dev; rtc->dev.class = rtc_class; rtc->dev.release = rtc_device_release; mutex_init(&rtc->ops_lock); spin_lock_init(&rtc->irq_lock); spin_lock_init(&rtc->irq_task_lock); init_waitqueue_head(&rtc->irq_queue); strlcpy(rtc->name, name, RTC_DEVICE_NAME_SIZE); dev_set_name(&rtc->dev, "rtc%d", id); /*rtc->dev.devt = MKDEV(MAJOR(rtc_devt),rtc->id); cdev_init(&rtc->char_dev,&rtc_dev_fops);其中rtc_devt是从调用alloc_chrdev_region时获得的*/ rtc_dev_prepare(rtc); /*注册该RTC设备rtc->dev*/ err = device_register(&rtc->dev); if (err) goto exit_kfree; /*cdev_add(&rtc->chr_dev,rtc->dev.devt,1);将rtc->chrdev注册到系统中*/ rtc_dev_add_device(rtc); /*在/sys下添加属性文件*/ rtc_sysfs_add_device(rtc); /*在/proc中创建入口项"driver/rtc"*/ rtc_proc_add_device(rtc); dev_info(dev, "rtc core: registered %s as %s\n", rtc->name, dev_name(&rtc->dev)); return rtc; exit_kfree: kfree(rtc); exit_idr: mutex_lock(&idr_lock); idr_remove(&rtc_idr, id); mutex_unlock(&idr_lock); exit: dev_err(dev, "rtc core: unable to register %s, err = %d\n", name, err); return ERR_PTR(err); }
下边是s3c_rtc_enable函数的实现:
static void s3c_rtc_enable(struct platform_device *pdev, int en) { void __iomem *base = s3c_rtc_base; unsigned int tmp; if (s3c_rtc_base == NULL) return; /*如果禁止,就disable RTCCON与TICNT*/ if (!en) { tmp = readb(base + S3C2410_RTCCON); writeb(tmp & ~S3C2410_RTCCON_RTCEN, base + S3C2410_RTCCON); tmp = readb(base + S3C2410_TICNT); writeb(tmp & ~S3C2410_TICNT_ENABLE, base + S3C2410_TICNT); } else { /* re-enable the device, and check it is ok */ /*如果RTCCON没有使能,则使能之*/ if ((readb(base+S3C2410_RTCCON) & S3C2410_RTCCON_RTCEN) == 0){ dev_info(&pdev->dev, "rtc disabled, re-enabling\n"); tmp = readb(base + S3C2410_RTCCON); writeb(tmp|S3C2410_RTCCON_RTCEN, base+S3C2410_RTCCON); } /*如果BCD的计数选择位为1,则置位0,即Merge BCD counts*/ if ((readb(base + S3C2410_RTCCON) & S3C2410_RTCCON_CNTSEL)){ dev_info(&pdev->dev, "removing RTCCON_CNTSEL\n"); tmp = readb(base + S3C2410_RTCCON); writeb(tmp& ~S3C2410_RTCCON_CNTSEL, base+S3C2410_RTCCON); } /*如果BCD的时钟选择为1,则置位0,即XTAL 1/215 divided clock*/ if ((readb(base + S3C2410_RTCCON) & S3C2410_RTCCON_CLKRST)){ dev_info(&pdev->dev, "removing RTCCON_CLKRST\n"); tmp = readb(base + S3C2410_RTCCON); writeb(tmp & ~S3C2410_RTCCON_CLKRST, base+S3C2410_RTCCON); } } } static int __devexit s3c_rtc_remove(struct platform_device *dev) { /*从系统平台设备中获取RTC设备类的数据*/ struct rtc_device *rtc = platform_get_drvdata(dev); /*清空平台设备中RTC驱动数据*/ platform_set_drvdata(dev, NULL); /*注销RTC设备类*/ rtc_device_unregister(rtc); /*禁止RTC节拍时间计数寄存器TICNT的使能功能*/ s3c_rtc_setpie(&dev->dev, 0); /*禁止RTC报警控制寄存器RTCALM的全局报警使能功能*/ s3c_rtc_setaie(0); /*释放RTC虚拟地址映射空间*/ iounmap(s3c_rtc_base); /*释放获取的RTC平台设备的资源*/ release_resource(s3c_rtc_mem); /*销毁保存RTC平台设备的资源内存空间*/ kfree(s3c_rtc_mem); return 0; }
这里是电源管理部分,在挂起时保存TICNT的值,并禁止RTCCON,TICNT;在休眠的时候开启RTCCON,并恢复TICNT的值。
#ifdef CONFIG_PM /* RTC Power management control */ static int ticnt_save; static int s3c_rtc_suspend(struct platform_device *pdev, pm_message_t state) { /* save TICNT for anyone using periodic interrupts */ ticnt_save = readb(s3c_rtc_base + S3C2410_TICNT); s3c_rtc_enable(pdev, 0); return 0; } static int s3c_rtc_resume(struct platform_device *pdev) { s3c_rtc_enable(pdev, 1); writeb(ticnt_save, s3c_rtc_base + S3C2410_TICNT); return 0; } #else #define s3c_rtc_suspend NULL #define s3c_rtc_resume NULL #endif
s3c_rtcops是RTC设备在RTC核心部分注册的对RTC设备进行操作的结构体,类似字符设备在驱动中的file_operations对字符设备进行操作的意思。
static const struct rtc_class_ops s3c_rtcops = { .open = s3c_rtc_open, .release = s3c_rtc_release, .read_time = s3c_rtc_gettime, .set_time = s3c_rtc_settime, .read_alarm = s3c_rtc_getalarm, .set_alarm = s3c_rtc_setalarm, .irq_set_freq = s3c_rtc_setfreq, .irq_set_state = s3c_rtc_setpie, .proc = s3c_rtc_proc, };
这两个是下边会用到的中断处理函数,产生一个时钟中断的时候就更新一下rtc_irq_data的值,也就是说只有当产生一个时钟中断(也就是一个滴答tick)才返回给用户一个时间。
static irqreturn_t s3c_rtc_alarmirq(int irq, void *id) { struct rtc_device *rdev = id; rtc_update_irq(rdev, 1, RTC_AF | RTC_IRQF); return IRQ_HANDLED; } static irqreturn_t s3c_rtc_tickirq(int irq, void *id) { struct rtc_device *rdev = id; rtc_update_irq(rdev, 1, RTC_PF | RTC_IRQF); return IRQ_HANDLED; }
首先来看打开和关闭函数:
static int s3c_rtc_open(struct device *dev) { /*获得平台设备,从平台设备pdev->dev->driver_data获取rtc_device*/ struct platform_device *pdev = to_platform_device(dev); struct rtc_device *rtc_dev = platform_get_drvdata(pdev); int ret; /*注册RTC报警中断的中断处理函数*/ ret = request_irq(s3c_rtc_alarmno, s3c_rtc_alarmirq, IRQF_DISABLED, "s3c2410-rtc alarm", rtc_dev); if (ret) { dev_err(dev, "IRQ%d error %d\n", s3c_rtc_alarmno, ret); return ret; } /*注册TICK节拍时间中断的中断处理函数*/ ret = request_irq(s3c_rtc_tickno, s3c_rtc_tickirq, IRQF_DISABLED, "s3c2410-rtc tick", rtc_dev); if (ret) { dev_err(dev, "IRQ%d error %d\n", s3c_rtc_tickno, ret); goto tick_err; } return ret; tick_err: free_irq(s3c_rtc_alarmno, rtc_dev); return ret; }
RTC设备类关闭接口函数:
static void s3c_rtc_release(struct device *dev) { struct platform_device *pdev = to_platform_device(dev); struct rtc_device *rtc_dev = platform_get_drvdata(pdev); /* do not clear AIE here, it may be needed for wake */ s3c_rtc_setpie(dev, 0); free_irq(s3c_rtc_alarmno, rtc_dev); free_irq(s3c_rtc_tickno, rtc_dev); }
更新RTCALM寄存器的状态,是否使能:
static void s3c_rtc_setaie(int to) { unsigned int tmp; pr_debug("%s: aie=%d\n", __func__, to); tmp = readb(s3c_rtc_base + S3C2410_RTCALM) & ~S3C2410_RTCALM_ALMEN; if (to) tmp |= S3C2410_RTCALM_ALMEN; writeb(tmp, s3c_rtc_base + S3C2410_RTCALM); }
更新TICNT寄存器的状态,是否使能:
static int s3c_rtc_setpie(struct device *dev, int enabled) { unsigned int tmp; pr_debug("%s: pie=%d\n", __func__, enabled); spin_lock_irq(&s3c_rtc_pie_lock); tmp = readb(s3c_rtc_base + S3C2410_TICNT) & ~S3C2410_TICNT_ENABLE; if (enabled) tmp |= S3C2410_TICNT_ENABLE; writeb(tmp, s3c_rtc_base + S3C2410_TICNT); spin_unlock_irq(&s3c_rtc_pie_lock); return 0; }
更新TICNT节拍时间计数的值:
static int s3c_rtc_setfreq(struct device *dev, int freq) { unsigned int tmp; if (!is_power_of_2(freq)) return -EINVAL; spin_lock_irq(&s3c_rtc_pie_lock); tmp = readb(s3c_rtc_base + S3C2410_TICNT) & S3C2410_TICNT_ENABLE; tmp |= (128 / freq)-1; writeb(tmp, s3c_rtc_base + S3C2410_TICNT); spin_unlock_irq(&s3c_rtc_pie_lock); return 0; } /* Time read/write */ static int s3c_rtc_gettime(struct device *dev, struct rtc_time *rtc_tm) { unsigned int have_retried = 0; /*获得rtc IO端口寄存器的虚拟地址的起始地址*/ void __iomem *base = s3c_rtc_base; retry_get_time: /*读取RTC中BCD数中的:分、时、日期、月、年、秒,放到rtc_time rtc_tm中*/ rtc_tm->tm_min = readb(base + S3C2410_RTCMIN); rtc_tm->tm_hour = readb(base + S3C2410_RTCHOUR); rtc_tm->tm_mday = readb(base + S3C2410_RTCDATE); rtc_tm->tm_mon = readb(base + S3C2410_RTCMON); rtc_tm->tm_year = readb(base + S3C2410_RTCYEAR); rtc_tm->tm_sec = readb(base + S3C2410_RTCSEC); /* the only way to work out wether the system was mid-update * when we read it is to check the second counter, and if it * is zero, then we re-try the entire read */ /*如果到达0秒就检查一下,因为年月日时分可能会有加1操作,比如此时是一年的最后天的最后一分一秒,则年月日时分秒都会改变*/ if (rtc_tm->tm_sec == 0 && !have_retried) { have_retried = 1; goto retry_get_time; } pr_debug("read time %02x.%02x.%02x %02x/%02x/%02x\n", rtc_tm->tm_year, rtc_tm->tm_mon, rtc_tm->tm_mday, rtc_tm->tm_hour, rtc_tm->tm_min, rtc_tm->tm_sec); /*使用readb读取寄存器的值得到的是bcd格式,必须转换成bin格式再保存*/ rtc_tm->tm_sec = bcd2bin(rtc_tm->tm_sec); rtc_tm->tm_min = bcd2bin(rtc_tm->tm_min); rtc_tm->tm_hour = bcd2bin(rtc_tm->tm_hour); rtc_tm->tm_mday = bcd2bin(rtc_tm->tm_mday); rtc_tm->tm_mon = bcd2bin(rtc_tm->tm_mon); rtc_tm->tm_year = bcd2bin(rtc_tm->tm_year); rtc_tm->tm_year += 100; rtc_tm->tm_mon -= 1; return 0; } static int s3c_rtc_settime(struct device *dev, struct rtc_time *tm) { void __iomem *base = s3c_rtc_base; int year = tm->tm_year - 100; pr_debug("set time %02d.%02d.%02d %02d/%02d/%02d\n", tm->tm_year, tm->tm_mon, tm->tm_mday, tm->tm_hour, tm->tm_min, tm->tm_sec); /* we get around y2k by simply not supporting it */ /*RTC时钟的范围是00~99,由BCDYEAR寄存器的0~7位存储*/ if (year < 0 || year >= 100) { dev_err(dev, "rtc only supports 100 years\n"); return -EINVAL; } /*将上面保存到RTC核心定义的时间结构体中的时间日期值写入对应的寄存器中*/ writeb(bin2bcd(tm->tm_sec), base + S3C2410_RTCSEC); writeb(bin2bcd(tm->tm_min), base + S3C2410_RTCMIN); writeb(bin2bcd(tm->tm_hour), base + S3C2410_RTCHOUR); writeb(bin2bcd(tm->tm_mday), base + S3C2410_RTCDATE); writeb(bin2bcd(tm->tm_mon + 1), base + S3C2410_RTCMON); writeb(bin2bcd(year), base + S3C2410_RTCYEAR); return 0; }
获取报警时间的值:
static int s3c_rtc_getalarm(struct device *dev, struct rtc_wkalrm *alrm) { struct rtc_time *alm_tm = &alrm->time; void __iomem *base = s3c_rtc_base; unsigned int alm_en; /*从RTC的报警寄存器中读取*/ alm_tm->tm_sec = readb(base + S3C2410_ALMSEC); alm_tm->tm_min = readb(base + S3C2410_ALMMIN); alm_tm->tm_hour = readb(base + S3C2410_ALMHOUR); alm_tm->tm_mon = readb(base + S3C2410_ALMMON); alm_tm->tm_mday = readb(base + S3C2410_ALMDATE); alm_tm->tm_year = readb(base + S3C2410_ALMYEAR); alm_en = readb(base + S3C2410_RTCALM); /*根据RTCALM寄存器的报警全局使能位来设置报警状态结构rtc_wkalrm*/ alrm->enabled = (alm_en & S3C2410_RTCALM_ALMEN) ? 1 : 0; pr_debug("read alarm %02x %02x.%02x.%02x %02x/%02x/%02x\n", alm_en, alm_tm->tm_year, alm_tm->tm_mon, alm_tm->tm_mday, alm_tm->tm_hour, alm_tm->tm_min, alm_tm->tm_sec); /* decode the alarm enable field */ /*如果RTCALM寄存器的秒使能,则将rtc_wkalrm中存放的秒数据由BCD格式转换为BIN格式,否则设置为0xff*/ if (alm_en & S3C2410_RTCALM_SECEN) alm_tm->tm_sec = bcd2bin(alm_tm->tm_sec); else alm_tm->tm_sec = 0xff; /*如果RTCALM寄存器的分钟使能,则将rtc_wkalrm中存放的分钟数据由BCD格式转换为BIN格式,否则设置为0xff*/ if (alm_en & S3C2410_RTCALM_MINEN) alm_tm->tm_min = bcd2bin(alm_tm->tm_min); else alm_tm->tm_min = 0xff; /*如果RTCALM寄存器的小时使能,则将rtc_wkalrm中存放的小时数据由BCD格式转换为BIN格式,否则设置为0xff*/ if (alm_en & S3C2410_RTCALM_HOUREN) alm_tm->tm_hour = bcd2bin(alm_tm->tm_hour); else alm_tm->tm_hour = 0xff; /*如果RTCALM寄存器的日使能,则将rtc_wkalrm中存放的日数据由BCD格式转换为BIN格式,否则设置为0xff*/ if (alm_en & S3C2410_RTCALM_DAYEN) alm_tm->tm_mday = bcd2bin(alm_tm->tm_mday); else alm_tm->tm_mday = 0xff; /*如果RTCALM寄存器的月使能,则将rtc_wkalrm中存放的月数据由BCD格式转换为BIN格式,否则设置为0xff*/ if (alm_en & S3C2410_RTCALM_MONEN) { alm_tm->tm_mon = bcd2bin(alm_tm->tm_mon); alm_tm->tm_mon -= 1; } else { alm_tm->tm_mon = 0xff; } /*如果RTCALM寄存器的年使能,则将rtc_wkalrm中存放的年数据由BCD格式转换为BIN格式,否则设置为0xff*/ if (alm_en & S3C2410_RTCALM_YEAREN) alm_tm->tm_year = bcd2bin(alm_tm->tm_year); else alm_tm->tm_year = 0xffff; return 0; }
设置报警时间的值:
static int s3c_rtc_setalarm(struct device *dev, struct rtc_wkalrm *alrm) { struct rtc_time *tm = &alrm->time; void __iomem *base = s3c_rtc_base; unsigned int alrm_en; pr_debug("s3c_rtc_setalarm: %d, %02x/%02x/%02x %02x.%02x.%02x\n", alrm->enabled, tm->tm_mday & 0xff, tm->tm_mon & 0xff, tm->tm_year & 0xff, tm->tm_hour & 0xff, tm->tm_min & 0xff, tm->tm_sec); /*读取RTCALM寄存器的全局使能位,关闭所有报警使能*/ alrm_en = readb(base + S3C2410_RTCALM) & S3C2410_RTCALM_ALMEN; writeb(0x00, base + S3C2410_RTCALM); /*如果秒时间在合理范围内,则使能秒报警位,将报警状态寄存器中封装的time的秒位由BIN格式转换为BCD,写入秒报警寄存器中*/ if (tm->tm_sec < 60 && tm->tm_sec >= 0) { alrm_en |= S3C2410_RTCALM_SECEN; writeb(bin2bcd(tm->tm_sec), base + S3C2410_ALMSEC); } /*如果分钟时间在合理范围内,则使能分钟报警位,将报警状态寄存器中封装的time的分钟位由BIN格式转换为BCD,写入分钟报警寄存器中*/ if (tm->tm_min < 60 && tm->tm_min >= 0) { alrm_en |= S3C2410_RTCALM_MINEN; writeb(bin2bcd(tm->tm_min), base + S3C2410_ALMMIN); } /*如果小时时间在合理范围内,则使能小时报警位,将报警状态寄存器中封装的time的小时位由BIN格式转换为BCD,写入小时报警寄存器中*/ if (tm->tm_hour < 24 && tm->tm_hour >= 0) { alrm_en |= S3C2410_RTCALM_HOUREN; writeb(bin2bcd(tm->tm_hour), base + S3C2410_ALMHOUR); } pr_debug("setting S3C2410_RTCALM to %08x\n", alrm_en); /*使能RTCALM寄存器全局报警位*/ writeb(alrm_en, base + S3C2410_RTCALM); /**/ s3c_rtc_setaie(alrm->enabled); /*根据全局报警使能的状态来决定是唤醒RTC报警中断还是睡眠RTC报警中断*/ if (alrm->enabled) enable_irq_wake(s3c_rtc_alarmno); else disable_irq_wake(s3c_rtc_alarmno); return 0; }
下面来分析一下是怎样获取和设置时间的:
通过用户空间的ioctl,在rtc-dev.c中实现了rtc_dev_ioctl,其中获取和设置时间如下:
case RTC_RD_TIME: mutex_unlock(&rtc->ops_lock); err = rtc_read_time(rtc, &tm); if (err < 0) return err; if (copy_to_user(uarg, &tm, sizeof(tm))) err = -EFAULT; return err; case RTC_SET_TIME: mutex_unlock(&rtc->ops_lock); if (copy_from_user(&tm, uarg, sizeof(tm))) return -EFAULT; return rtc_set_time(rtc, &tm);
通过copy_to_user和copy_from_user实现时间在内核空间与用户空间的传递。这里调用到的rtc_read_time和rtc_set_time在interface.c中实现:
int rtc_read_time(struct rtc_device *rtc, struct rtc_time *tm) { int err; err = mutex_lock_interruptible(&rtc->ops_lock); if (err) return err; if (!rtc->ops) err = -ENODEV; else if (!rtc->ops->read_time) err = -EINVAL; else { memset(tm, 0, sizeof(struct rtc_time)); err = rtc->ops->read_time(rtc->dev.parent, tm); } mutex_unlock(&rtc->ops_lock); return err; } int rtc_set_time(struct rtc_device *rtc, struct rtc_time *tm) { int err; err = rtc_valid_tm(tm); if (err != 0) return err; err = mutex_lock_interruptible(&rtc->ops_lock); if (err) return err; if (!rtc->ops) err = -ENODEV; else if (rtc->ops->set_time) err = rtc->ops->set_time(rtc->dev.parent, tm); else if (rtc->ops->set_mmss) { unsigned long secs; err = rtc_tm_to_time(tm, &secs); if (err == 0) err = rtc->ops->set_mmss(rtc->dev.parent, secs); } else err = -EINVAL; mutex_unlock(&rtc->ops_lock); return err; }
可以看出他们调用了具体RTC设备驱动中的read_time和set_time函数,对应了s3c2410中的s3c_rtc_gettime和s3c_rtc_settime,这里使用的rtc_tm_to_time函数实现在rtclib.c中,/drivers/rtc/interface.c定义了可供其它模块访问的接口。















 430
430

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









