






全驱动船舶轨迹跟踪自适应动态面滑模控制;带有扰动观测器;圆轨迹和直线轨迹;自适应滑模;动态面控制



全驱动船舶轨迹跟踪自适应动态面滑模控制是一种在船舶自主导航领域广泛应用的高级控制技术。本文旨在对这一技术进行深入分析和探讨,展示其在实际应用中的优势和潜力。
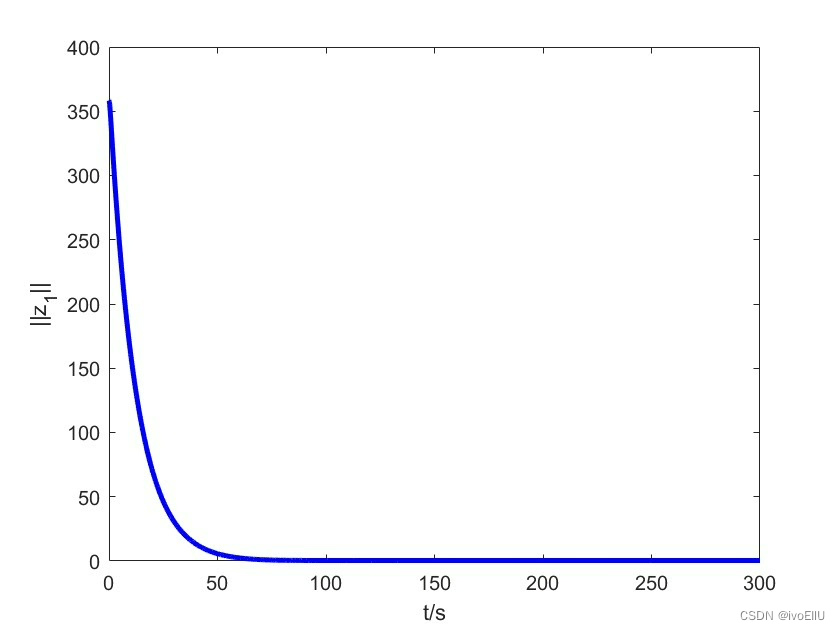
在船舶自主导航系统中,轨迹跟踪是其中一项关键任务,其目标是使船舶按照设定的轨迹路径进行精确控制。然而,由于环境扰动、模型误差和未知参数等因素的存在,传统的控制方法往往难以满足精确跟踪的要求。为了解决这一问题,全驱动船舶轨迹跟踪自适应动态面滑模控制技术应运而生。
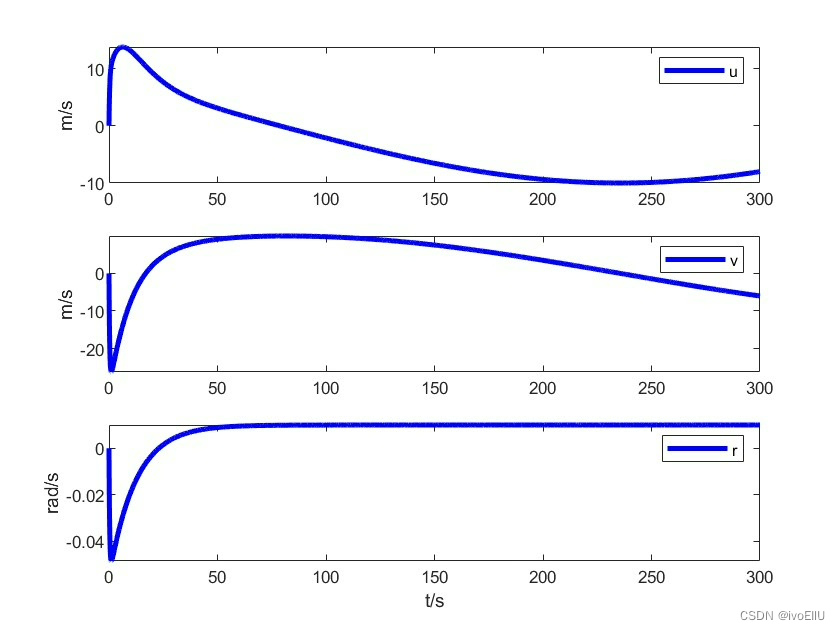
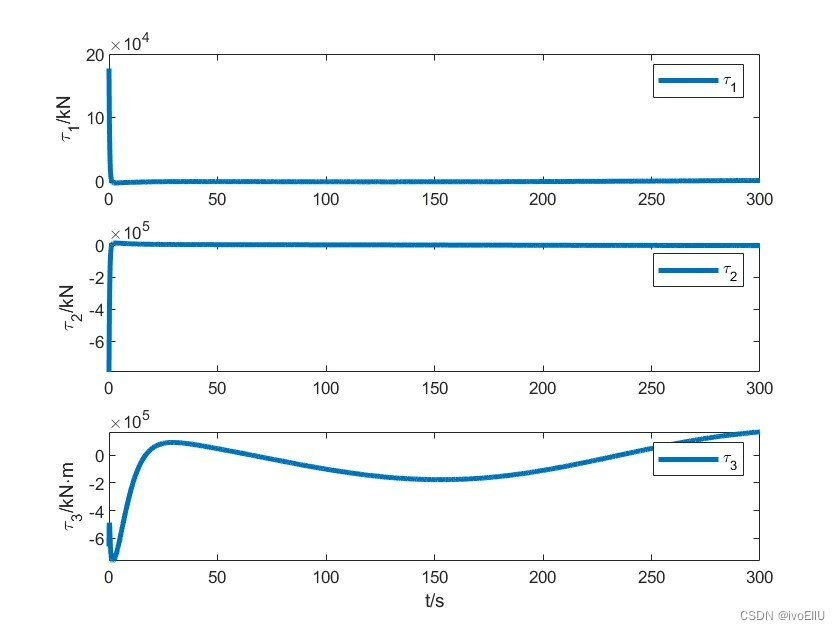
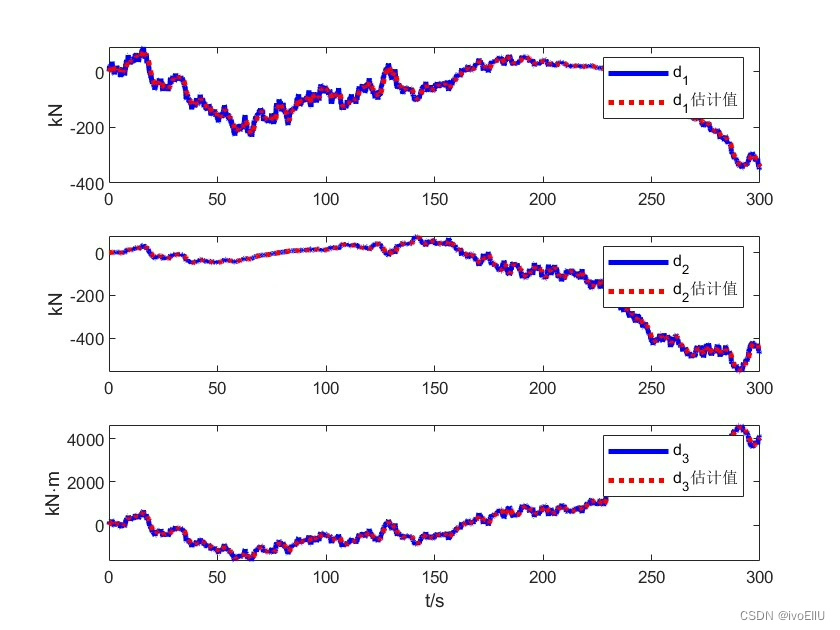
全驱动船舶轨迹跟踪自适应动态面滑模控制技术采用了自适应滑模控制的思想,通过引入扰动观测器来估计和抵消不可控的环境扰动。该技术首先通过建立船舶动力学模型,利用滑模面原理设计控制律,实现对船舶位置和速度的精确控制。同时,自适应机制和动态面控制策略能够根据环境条件的变化以及模型参数的不确定性,自动调整控制参数,从而提高系统的鲁棒性和适应性。
在具体应用场景中,全驱动船舶轨迹跟踪自适应动态面滑模控制技术可以实现对圆轨迹和直线轨迹的精确控制。通过设定合适的轨迹路径和控制目标,船舶可以按照用户的需求进行运动,实现多样化和灵活化的航行任务。同时,该技术还能够适应不同环境条件下的船舶运动特性和控制要求,具有较强的适应性和通用性。
值得注意的是,全驱动船舶轨迹跟踪自适应动态面滑模控制技术在实际应用中还存在一些挑战和改进空间。例如,对于复杂环境下的航行任务,如弯曲水道和逆风条件下的船舶控制,仍需要进一步研究和改进控制策略。此外,对于系统模型和参数的精确性要求也是一个需要解决的问题。
综上所述,全驱动船舶轨迹跟踪自适应动态面滑模控制技术是一项具有广阔应用前景的高级控制技术。通过引入自适应机制和动态面控制策略,该技术能够实现船舶轨迹的精确跟踪,并具备较强的适应性和鲁棒性。在未来的研究中,我们可以进一步探索该技术在其他领域的应用,并不断改进和完善其控制策略,以满足不同应用场景的需求。
相关代码,程序地址:http://imgcs.cn/lanzoun/701993121536.html















 554
554











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









