







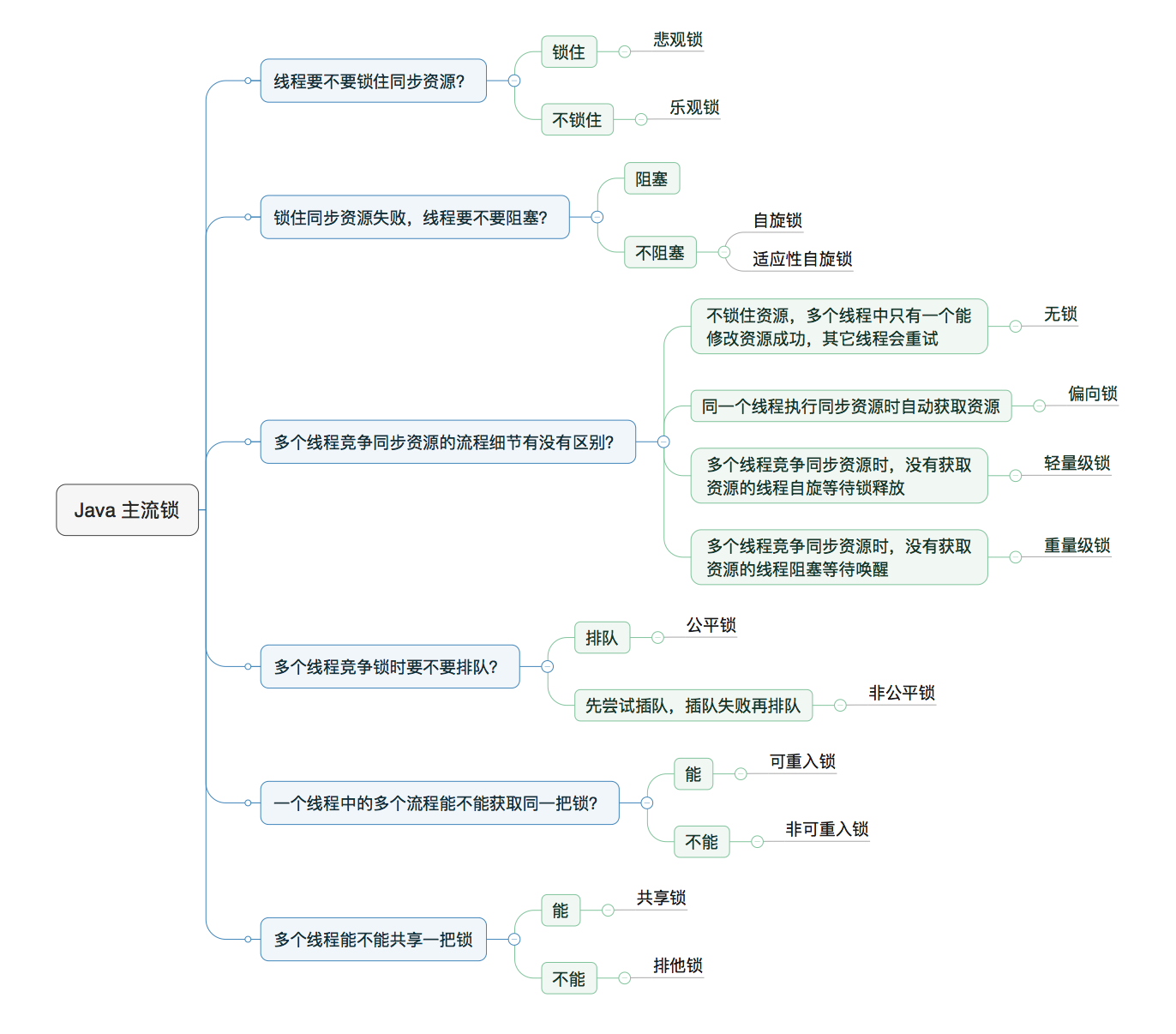
 本文详细介绍了多线程中的锁概念,包括互斥锁、乐观锁(如CAS操作)、悲观锁、自旋锁及其变种适应性自旋锁、可重入锁、公平锁与非公平锁、排他锁与共享锁,以及读写锁。讨论了锁的优化策略,如减少锁持有时间、锁分离和锁粗化,旨在提高并发性能。
本文详细介绍了多线程中的锁概念,包括互斥锁、乐观锁(如CAS操作)、悲观锁、自旋锁及其变种适应性自旋锁、可重入锁、公平锁与非公平锁、排他锁与共享锁,以及读写锁。讨论了锁的优化策略,如减少锁持有时间、锁分离和锁粗化,旨在提高并发性能。
线程安全是程序设计中的术语,指某个函数、函数库在多线程环境中被调用时,能够正确地处理多个线程之间的全局变量,使程序功能正确完成。
假设有间银行只有 1000 元,而两个人同时提领 1000 元时就可能会拿到总计 2000 元的金额。为了避免这个问题,该间银行提款时应该使用互斥锁,即意味着针对同一个资源处理时,前一个人提领交易完成后才处理下一笔交易。但这种手法会使得效能降低。
线程安全的函数一般不应该修改全局对象。
锁的概念
在计算机科学中,锁是在执行多线程时用于强行限制资源访问的同步机制,即用于在并发控制中保证对互斥要求的满足。
互斥锁
互斥锁(英语:Mutual exclusion,缩写 Mutex)是一种用于多线程编程中,防止两条线程同时对同一公共资源(比如全局变量)进行读写的机制。该目的通过将代码切片成一个一个的临界区域(critical section)达成。
临界区域指的是一块对公共资源进行访问的代码,并非一种机制或是算法。一个程序、进程、线程可以拥有多个临界区域,但是并不一定会应用互斥锁。
一段代码(甲)正在分步修改一块数据。这时,另一条线程(乙)由于一些原因被唤醒。如果乙此时去读取甲正在修改的数据,而甲碰巧还没有完成整个修改过程,这个时候这块数据的状态就处在极大的不确定状态中,读取到的数据当然也是有问题的。更严重的情况是乙也往这块地方写数据,这样的一来,后果将变得不可收拾。因此,多个线程间共享的数据必须被保护。达到这个目的的方法,就是确保同一时间只有一个临界区域处于运行状态,而其他的临界区域,无论是读是写,都必须被挂起并且不能获得运行机会
乐观锁
在关系数据库管理系统里,乐观并发控制(又名“乐观锁”,Optimistic Concurrency Control,缩写“OCC”)是一种并发的方法。它假设多用户并发的事务在处理时不会彼此互相影响,各事务能够在不产生锁的情况下处理各自影响的那部分数据。在提交数据更新之前,每个事务会先检查在该事务读取数据后,有没有其他事务又修改了该数据。如果其他事务有更新的话,正在提交的事务会进行回滚。
乐观并发控制多数用于数据争用不大、冲突较少的环境中,这种环境中,偶尔回滚事务的成本会低于读取数据时锁定数据的成本,因此可以获得比其他并发控制方法更高的吞吐量。
乐观并发控制的事务包括以下阶段:
- 读取:事务将数据读入缓存,这时系统会给事务分派一个时间戳。
- 校验:事务执行完毕后,进行提交。这时同步校验所有事务,如果事务所读取的数据在读取之后又被其他事务修改,则产生冲突,事务被中断回滚。
- 写入:通过校验阶段后,将更新的数据写入数据库。
乐观并发控制相信事务之间的数据竞争(data race)的概率是比较小的,因此尽可能直接做下去,直到提交的时候才去锁定,所以不会产生
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









