






- 设计前准备
1、材料清单
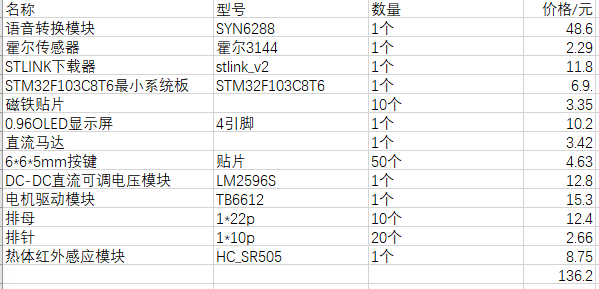
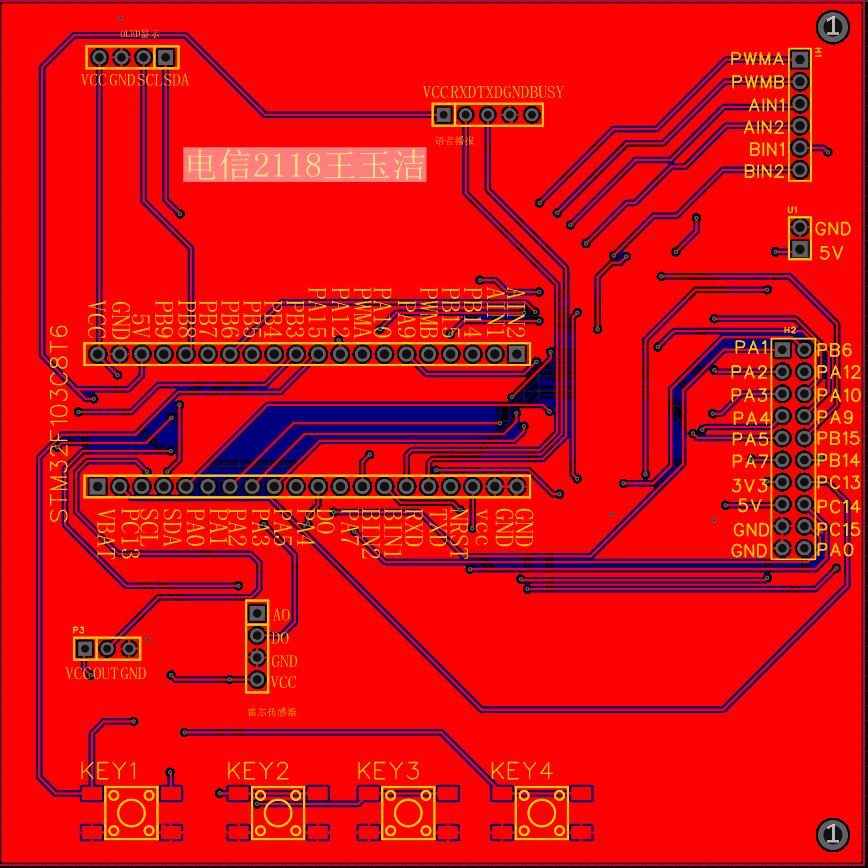
PCB
使用嘉立创PCB来绘图
优点:新手上手更快、拥有丰富的分装库、操作简单、可直接下单、每月可免费打样两次(10*10cm)
主控PCB用的模块所以都用的排母作为引脚的引出
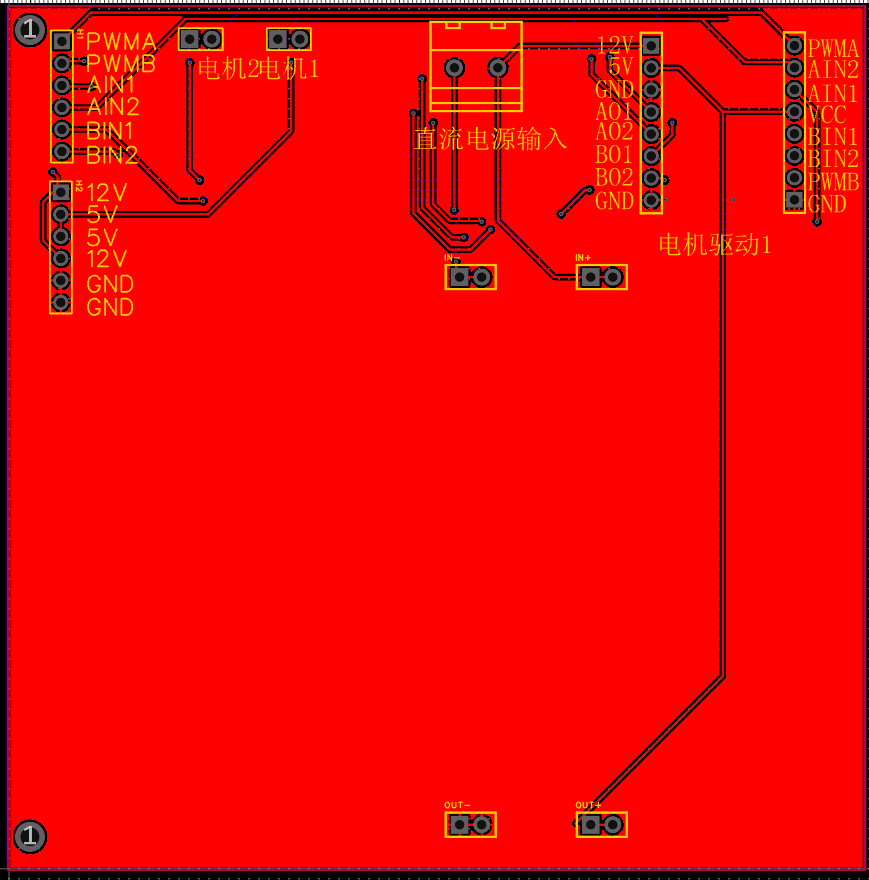
电机PCB
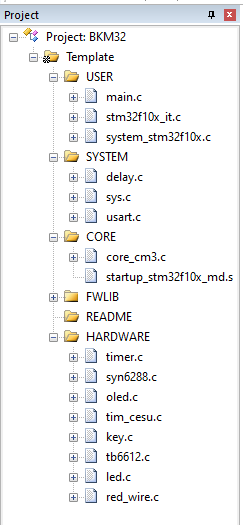
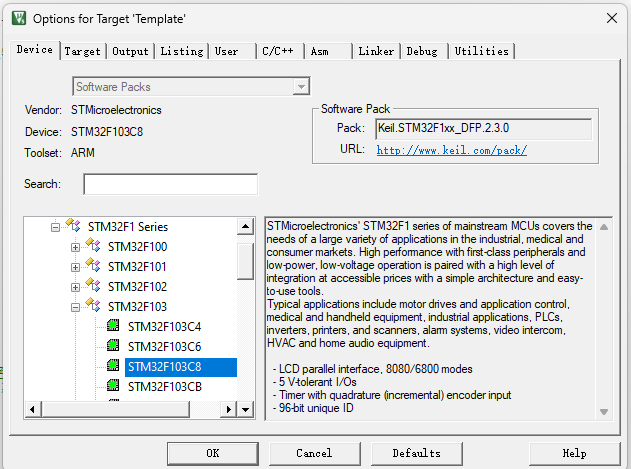
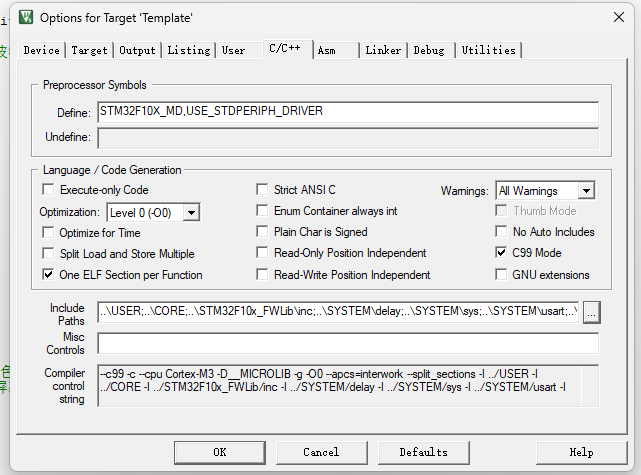
3、环境配置
使用KEIL5进行程序编写
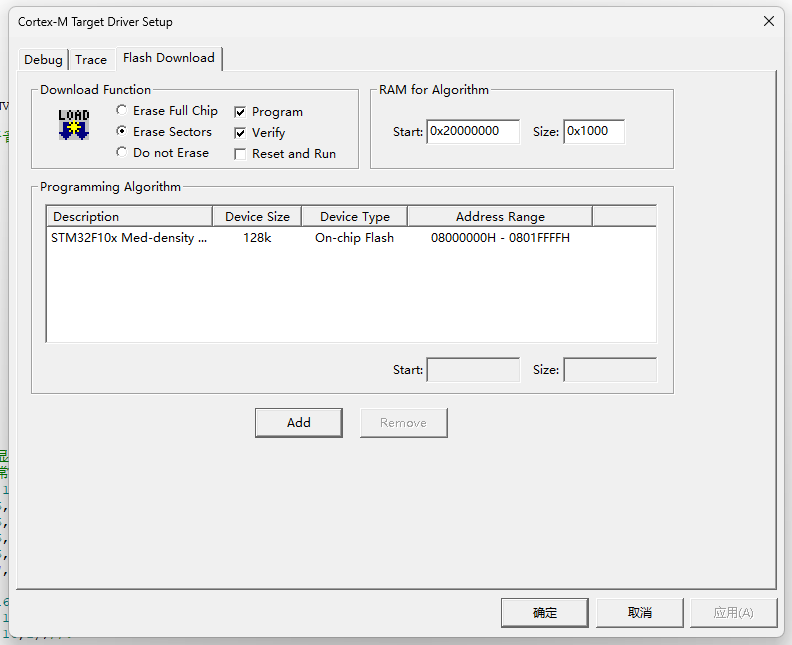
ST_Link设置
- 模块程序编写
1、syn6288.c
使用淘宝卖家提供的SYN6288程序驱动,只需在SYN_FrameInfo函数中修改值就可以进行简单的使用
#include "syn6288.h"
#include "usart.h"
#include "string.h"
#include "delay.h"
//Music:选择背景音乐。0:无背景音乐,1~15:选择背景音乐
void SYN_FrameInfo(u8 Music, u8 *HZdata)
{
/****************需要发送的文本**********************************/
unsigned char Frame_Info[50];
unsigned char HZ_Length;
unsigned char ecc = 0; //定义校验字节
unsigned int i = 0;
HZ_Length = strlen((char*)HZdata); //需要发送文本的长度
/*****************帧固定配置信息**************************************/
Frame_Info[0] = 0xFD ; //构造帧头FD
Frame_Info[1] = 0x00 ; //构造数据区长度的高字节
Frame_Info[2] = HZ_Length + 3; //构造数据区长度的低字节
Frame_Info[3] = 0x01 ; //构造命令字:合成播放命令
Frame_Info[4] = 0x01 | Music << 4 ; //构造命令参数:背景音乐设定
/*******************校验码计算***************************************/
for(i = 0; i < 5; i++) //依次发送构造好的5个帧头字节
{
ecc = ecc ^ (Frame_Info[i]); //对发送的字节进行异或校验
}
for(i = 0; i < HZ_Length; i++) //依次发送待合成的文本数据
{
ecc = ecc ^ (HZdata[i]); //对发送的字节进行异或校验
}
/*******************发送帧信息***************************************/
memcpy(&Frame_Info[5], HZdata, HZ_Length);
Frame_Info[5 + HZ_Length] = ecc;
USART3_SendString(Frame_Info, 5 + HZ_Length + 1);
}
/***********************************************************
* 名 称: YS_SYN_Set(u8 *Info_data)
* 功 能: 主函数 程序入口
* 入口参数: *Info_data:固定的配置信息变量
* 出口参数:
* 说 明:本函数用于配置,停止合成、暂停合成等设置 ,默认波特率9600bps。
* 调用方法:通过调用已经定义的相关数组进行配置。
**********************************************************/
void YS_SYN_Set(u8 *Info_data)
{
u8 Com_Len;
Com_Len = strlen((char*)Info_data);
USART3_SendString(Info_data, Com_Len);
}
2、霍尔传感器驱动
霍尔传感器的测速使用DO端口进行计数,在DO模式下当磁铁靠近会产生低电平型号,使用中断进行触发并使用一个变量进行计数
#include "stm32f10x.h"
#include "tim_cesu.h"
#include "delay.h"
#include "tim_cesu.h"
#include "delay.h"
u8 quan=0;
void CESU_Init(void)
{ GPIO_InitTypeDef gpio;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA+RCC_APB2Periph_AFIO,ENABLE);//使能GPIOA
gpio.GPIO_Mode=GPIO_Mode_IPD;
gpio.GPIO_Pin=GPIO_Pin_7;
gpio.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio);
EXTI_InitTypeDef EXTI_InitStructure; //中断方式初始化
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource7);
EXTI_ClearITPendingBit(EXTI_Line7);
EXTI_InitStructure.EXTI_Line=EXTI_Line7; //指定中断线3
EXTI_InitStructure.EXTI_LineCmd=ENABLE; //使能中断线
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt; //中断模式
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_Init(&EXTI_InitStructure);
}
void NVICinit(void)
{
NVIC_InitTypeDef nvic;//中断优先级初始化结构体
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
nvic.NVIC_IRQChannel =EXTI9_5_IRQn; ;//使能按键外部中断通道
nvic.NVIC_IRQChannelPreemptionPriority =2; //抢占优先级主优先级0
nvic.NVIC_IRQChannelSubPriority =0x01;//子优先级0-15
nvic.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvic);//初始化中断优先级
}
void EXTI9_5_IRQHandler(void)
{
if(EXTI_GetFlagStatus(EXTI_Line7)!=RESET)
{
quan=quan+1;
delay_us(100);
//清空中断标志位,防止持续进入中断
}
EXTI_ClearITPendingBit(EXTI_Line7);
}
3、OLED驱动
使用的是正点原子opendv论坛上提供的0.96OLED驱动,使用I2C进行数据的传输。是使用取模软件进行对汉字的取模
#include "oled.h"
#include "stdlib.h"
#include "oledfont.h"
#include "delay.h"
u8 OLED_GRAM[144][8];
//反显函数
void OLED_ColorTurn(u8 i)
{
if(i==0)
{
OLED_WR_Byte(0xA6,OLED_CMD);//正常显示
}
if(i==1)
{
OLED_WR_Byte(0xA7,OLED_CMD);//反色显示
}
}
//屏幕旋转180度
void OLED_DisplayTurn(u8 i)
{
if(i==0)
{
OLED_WR_Byte(0xC8,OLED_CMD);//正常显示
OLED_WR_Byte(0xA1,OLED_CMD);
}
if(i==1)
{
OLED_WR_Byte(0xC0,OLED_CMD);//反转显示
OLED_WR_Byte(0xA0,OLED_CMD);
}
}
//延时
void IIC_delay(void)
{
u8 t=3;
while(t--);
}
//起始信号
void I2C_Start(void)
{
OLED_SDA_Set();
OLED_SCL_Set();
IIC_delay();
OLED_SDA_Clr();
IIC_delay();
OLED_SCL_Clr();
IIC_delay();
}
//结束信号
void I2C_Stop(void)
{
OLED_SDA_Clr();
OLED_SCL_Set();
IIC_delay();
OLED_SDA_Set();
}
//等待信号响应
void I2C_WaitAck(void) //测数据信号的电平
{
OLED_SDA_Set();
IIC_delay();
OLED_SCL_Set();
IIC_delay();
OLED_SCL_Clr();
IIC_delay();
}
//写入一个字节
void Send_Byte(u8 dat)
{
u8 i;
for(i=0;i<8;i++)
{
if(dat&0x80)//将dat的8位从最高位依次写入
{
OLED_SDA_Set();
}
else
{
OLED_SDA_Clr();
}
IIC_delay();
OLED_SCL_Set();
IIC_delay();
OLED_SCL_Clr();//将时钟信号设置为低电平
dat<<=1;
}
}
//发送一个字节
//mode:数据/命令标志 0,表示命令;1,表示数据;
void OLED_WR_Byte(u8 dat,u8 mode)
{
I2C_Start();
Send_Byte(0x78);
I2C_WaitAck();
if(mode){Send_Byte(0x40);}
else{Send_Byte(0x00);}
I2C_WaitAck();
Send_Byte(dat);
I2C_WaitAck();
I2C_Stop();
}
//开启OLED显示
void OLED_DisPlay_On(void)
{
OLED_WR_Byte(0x8D,OLED_CMD);//电荷泵使能
OLED_WR_Byte(0x14,OLED_CMD);//开启电荷泵
OLED_WR_Byte(0xAF,OLED_CMD);//点亮屏幕
}
//关闭OLED显示
void OLED_DisPlay_Off(void)
{
OLED_WR_Byte(0x8D,OLED_CMD);//电荷泵使能
OLED_WR_Byte(0x10,OLED_CMD);//关闭电荷泵
OLED_WR_Byte(0xAE,OLED_CMD);//关闭屏幕
}
//更新显存到OLED
void OLED_Refresh(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
OLED_WR_Byte(0xb0+i,OLED_CMD); //设置行起始地址
OLED_WR_Byte(0x00,OLED_CMD); //设置低列起始地址
OLED_WR_Byte(0x10,OLED_CMD); //设置高列起始地址
I2C_Start();
Send_Byte(0x78);
I2C_WaitAck();
Send_Byte(0x40);
I2C_WaitAck();
for(n=0;n<128;n++)
{
Send_Byte(OLED_GRAM[n][i]);
I2C_WaitAck();
}
I2C_Stop();
}
}
//清屏函数
void OLED_Clear(void)
{
u8 i,n;
for(i=0;i<8;i++)
{
for(n=0;n<128;n++)
{
OLED_GRAM[n][i]=0;//清除所有数据
}
}
OLED_Refresh();//更新显示
}
//画点
//x:0~127
//y:0~63
//t:1 填充 0,清空
void OLED_DrawPoint(u8 x,u8 y,u8 t)
{
u8 i,m,n;
i=y/8;
m=y%8;
n=1<<m;
if(t){OLED_GRAM[x][i]|=n;}
else
{
OLED_GRAM[x][i]=~OLED_GRAM[x][i];
OLED_GRAM[x][i]|=n;
OLED_GRAM[x][i]=~OLED_GRAM[x][i];
}
}
//画线
//x1,y1:起点坐标
//x2,y2:结束坐标
void OLED_DrawLine(u8 x1,u8 y1,u8 x2,u8 y2,u8 mode)
{
u16 t;
int xerr=0,yerr=0,delta_x,delta_y,distance;
int incx,incy,uRow,uCol;
delta_x=x2-x1; //计算坐标增量
delta_y=y2-y1;
uRow=x1;//画线起点坐标
uCol=y1;
if(delta_x>0)incx=1; //设置单步方向
else if (delta_x==0)incx=0;//垂直线
else {incx=-1;delta_x=-delta_x;}
if(delta_y>0)incy=1;
else if (delta_y==0)incy=0;//水平线
else {incy=-1;delta_y=-delta_x;}
if(delta_x>delta_y)distance=delta_x; //选取基本增量坐标轴
else distance=delta_y;
for(t=0;t<distance+1;t++)
{
OLED_DrawPoint(uRow,uCol,mode);//画点
xerr+=delta_x;
yerr+=delta_y;
if(xerr>distance)
{
xerr-=distance;
uRow+=incx;
}
if(yerr>distance)
{
yerr-=distance;
uCol+=incy;
}
}
}
//x,y:圆心坐标
//r:圆的半径
void OLED_DrawCircle(u8 x,u8 y,u8 r)
{
int a, b,num;
a = 0;
b = r;
while(2 * b * b >= r * r)
{
OLED_DrawPoint(x + a, y - b,1);
OLED_DrawPoint(x - a, y - b,1);
OLED_DrawPoint(x - a, y + b,1);
OLED_DrawPoint(x + a, y + b,1);
OLED_DrawPoint(x + b, y + a,1);
OLED_DrawPoint(x + b, y - a,1);
OLED_DrawPoint(x - b, y - a,1);
OLED_DrawPoint(x - b, y + a,1);
a++;
num = (a * a + b * b) - r*r;//计算画的点离圆心的距离
if(num > 0)
{
b--;
a--;
}
}
}
//在指定位置显示一个字符,包括部分字符
//x:0~127
//y:0~63
//size1:选择字体 6x8/6x12/8x16/12x24
//mode:0,反色显示;1,正常显示
void OLED_ShowChar(u8 x,u8 y,u8 chr,u8 size1,u8 mode)
{
u8 i,m,temp,size2,chr1;
u8 x0=x,y0=y;
if(size1==8)size2=6;
else size2=(size1/8+((size1%8)?1:0))*(size1/2); //得到字体一个字符对应点阵集所占的字节数
chr1=chr-' '; //计算偏移后的值
for(i=0;i<size2;i++)
{
if(size1==8)
{temp=asc2_0806[chr1][i];} //调用0806字体
else if(size1==12)
{temp=asc2_1206[chr1][i];} //调用1206字体
else if(size1==16)
{temp=asc2_1608[chr1][i];} //调用1608字体
else if(size1==24)
{temp=asc2_2412[chr1][i];} //调用2412字体
else return;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((size1!=8)&&((x-x0)==size1/2))
{x=x0;y0=y0+8;}
y=y0;
}
}
//显示字符串
//x,y:起点坐标
//size1:字体大小
//*chr:字符串起始地址
//mode:0,反色显示;1,正常显示
void OLED_ShowString(u8 x,u8 y,u8 *chr,u8 size1,u8 mode)
{
while((*chr>=' ')&&(*chr<='~'))//判断是不是非法字符!
{
OLED_ShowChar(x,y,*chr,size1,mode);
if(size1==8)x+=6;
else x+=size1/2;
chr++;
}
}
//m^n
u32 OLED_Pow(u8 m,u8 n)
{
u32 result=1;
while(n--)
{
result*=m;
}
return result;
}
//显示数字
//x,y :起点坐标
//num :要显示的数字
//len :数字的位数
//size:字体大小
//mode:0,反色显示;1,正常显示
void OLED_ShowNum(u8 x,u8 y,u32 num,u8 len,u8 size1,u8 mode)
{
u8 t,temp,m=0;
if(size1==8)m=2;
for(t=0;t<len;t++)
{
temp=(num/OLED_Pow(10,len-t-1))%10;
if(temp==0)
{
OLED_ShowChar(x+(size1/2+m)*t,y,'0',size1,mode);
}
else
{
OLED_ShowChar(x+(size1/2+m)*t,y,temp+'0',size1,mode);
}
}
}
//显示汉字
//x,y:起点坐标
//num:汉字对应的序号
//mode:0,反色显示;1,正常显示
void OLED_ShowChinese(u8 x,u8 y,u8 num,u8 size1,u8 mode)
{
u8 m,temp;
u8 x0=x,y0=y;
u16 i,size3=(size1/8+((size1%8)?1:0))*size1; //得到字体一个字符对应点阵集所占的字节数
for(i=0;i<size3;i++)
{
if(size1==16)
{temp=Hzk1[num][i];}//调用16*16字体
else if(size1==24)
{temp=Hzk2[num][i];}//调用24*24字体
else if(size1==32)
{temp=Hzk3[num][i];}//调用32*32字体
else if(size1==64)
{temp=Hzk4[num][i];}//调用64*64字体
else return;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((x-x0)==size1)
{x=x0;y0=y0+8;}
y=y0;
}
}
//num 显示汉字的个数
//space 每一遍显示的间隔
//mode:0,反色显示;1,正常显示
void OLED_ScrollDisplay(u8 num,u8 space,u8 mode)
{
u8 i,n,t=0,m=0,r;
while(1)
{
if(m==0)
{
OLED_ShowChinese(128,24,t,16,mode); //写入一个汉字保存在OLED_GRAM[][]数组中
t++;
}
if(t==num)
{
for(r=0;r<16*space;r++) //显示间隔
{
for(i=1;i<144;i++)
{
for(n=0;n<8;n++)
{
OLED_GRAM[i-1][n]=OLED_GRAM[i][n];
}
}
OLED_Refresh();
}
t=0;
}
m++;
if(m==16){m=0;}
for(i=1;i<144;i++) //实现左移
{
for(n=0;n<8;n++)
{
OLED_GRAM[i-1][n]=OLED_GRAM[i][n];
}
}
OLED_Refresh();
}
}
//x,y:起点坐标
//sizex,sizey,图片长宽
//BMP[]:要写入的图片数组
//mode:0,反色显示;1,正常显示
void OLED_ShowPicture(u8 x,u8 y,u8 sizex,u8 sizey,u8 BMP[],u8 mode)
{
u16 j=0;
u8 i,n,temp,m;
u8 x0=x,y0=y;
sizey=sizey/8+((sizey%8)?1:0);
for(n=0;n<sizey;n++)
{
for(i=0;i<sizex;i++)
{
temp=BMP[j];
j++;
for(m=0;m<8;m++)
{
if(temp&0x01)OLED_DrawPoint(x,y,mode);
else OLED_DrawPoint(x,y,!mode);
temp>>=1;
y++;
}
x++;
if((x-x0)==sizex)
{
x=x0;
y0=y0+8;
}
y=y0;
}
}
}
//OLED的初始化
void OLED_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD, ENABLE); //使能A端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//速度50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_6|GPIO_Pin_7);
OLED_RES_Clr();
delay_ms(200);
OLED_RES_Set();
OLED_WR_Byte(0xAE,OLED_CMD);//--turn off oled panel
OLED_WR_Byte(0x00,OLED_CMD);//---set low column address
OLED_WR_Byte(0x10,OLED_CMD);//---set high column address
OLED_WR_Byte(0x40,OLED_CMD);//--set start line address Set Mapping RAM Display Start Line (0x00~0x3F)
OLED_WR_Byte(0x81,OLED_CMD);//--set contrast control register
OLED_WR_Byte(0xCF,OLED_CMD);// Set SEG Output Current Brightness
OLED_WR_Byte(0xA1,OLED_CMD);//--Set SEG/Column Mapping 0xa0左右反置 0xa1正常
OLED_WR_Byte(0xC8,OLED_CMD);//Set COM/Row Scan Direction 0xc0上下反置 0xc8正常
OLED_WR_Byte(0xA6,OLED_CMD);//--set normal display
OLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)
OLED_WR_Byte(0x3f,OLED_CMD);//--1/64 duty
OLED_WR_Byte(0xD3,OLED_CMD);//-set display offset Shift Mapping RAM Counter (0x00~0x3F)
OLED_WR_Byte(0x00,OLED_CMD);//-not offset
OLED_WR_Byte(0xd5,OLED_CMD);//--set display clock divide ratio/oscillator frequency
OLED_WR_Byte(0x80,OLED_CMD);//--set divide ratio, Set Clock as 100 Frames/Sec
OLED_WR_Byte(0xD9,OLED_CMD);//--set pre-charge period
OLED_WR_Byte(0xF1,OLED_CMD);//Set Pre-Charge as 15 Clocks & Discharge as 1 Clock
OLED_WR_Byte(0xDA,OLED_CMD);//--set com pins hardware configuration
OLED_WR_Byte(0x12,OLED_CMD);
OLED_WR_Byte(0xDB,OLED_CMD);//--set vcomh
OLED_WR_Byte(0x40,OLED_CMD);//Set VCOM Deselect Level
OLED_WR_Byte(0x20,OLED_CMD);//-Set Page Addressing Mode (0x00/0x01/0x02)
OLED_WR_Byte(0x02,OLED_CMD);//
OLED_WR_Byte(0x8D,OLED_CMD);//--set Charge Pump enable/disable
OLED_WR_Byte(0x14,OLED_CMD);//--set(0x10) disable
OLED_WR_Byte(0xA4,OLED_CMD);// Disable Entire Display On (0xa4/0xa5)
OLED_WR_Byte(0xA6,OLED_CMD);// Disable Inverse Display On (0xa6/a7)
OLED_Clear();
OLED_WR_Byte(0xAF,OLED_CMD);
}
4、按键模块
拉高引脚输出高电平,当按键按下按键接地端会将端口电平拉低,调用内置函数读取应交状态
#include "stm32f10x.h"
#include "key.h"
#include "sys.h"
#include "delay.h"
//按键初始化函数
void KEY_Init(void) //IO初始化
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOC,ENABLE);//使能PORTA,PORTC时钟
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);//关闭jtag,使能SWD,可以用SWD模式调试
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15;//PA15
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA15
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5;//PC5
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //设置成上拉输入
GPIO_Init(GPIOC, &GPIO_InitStructure);//初始化GPIOC5
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//PA0
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0设置成输入,默认下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA.0
}
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1;//按键按松开标志
if(mode)key_up=1; //支持连按
if(key_up&&(KEY0==0||KEY1==0||WK_UP==1))
{
delay_ms(10);//去抖动
key_up=0;
if(KEY0==0)return KEY0_PRES;
else if(KEY1==0)return KEY1_PRES;
else if(WK_UP==1)return WKUP_PRES;
}else if(KEY0==1&&KEY1==1&&WK_UP==0)key_up=1;
return 0;// 无按键按下
}
5、红外人体感应
HC_SR505当有人靠近并移动时输出高电平,当人离开大概8S后输出低电平,在8S内会一直输出高电平且在期间有检测到移动,会将高电平时间进行顺言。
#include "stm32f10x.h"
#include "red_wire.h"
void red_wire_Init(void)
{
GPIO_InitTypeDef gpio;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA+RCC_APB2Periph_AFIO,ENABLE);//使能GPIOA
gpio.GPIO_Mode=GPIO_Mode_IPD;
gpio.GPIO_Pin=GPIO_Pin_6;
gpio.GPIO_Speed=GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio);
}
6、主函数
流程为当有人触发红外,播报价格提醒,结束后KEY1控制启动,KEY2暂停,KEY3结束行程清零所有参数并向乘客播报。其中使用变量使红外在本轮中只能被执行一次,当结束时在对其清零。在测试过程中发现,霍尔传感器在被出发时会计两次数,所以在调用参数时对其进行除2的操作。
#include "sys.h"
#include "delay.h"
#include "stdio.h"
#include "usart.h"
#include "syn6288.h"
#include "oled.h"
#include "bmp.h"
#include "tim_cesu.h"
#include "key.h"
#include "tb6612.h"
#include "led.h"
#include "red_wire.h"
#include "stm32f10x.h"
extern u8 quan;//tim_cesu中记录圈数的zhi
/**************芯片设置命令*********************/
u8 SYN_StopCom[] = {0xFD, 0X00, 0X02, 0X02, 0XFD}; //停止合成
u8 SYN_SuspendCom[] = {0XFD, 0X00, 0X02, 0X03, 0XFC}; //暂停合成
u8 SYN_RecoverCom[] = {0XFD, 0X00, 0X02, 0X04, 0XFB}; //恢复合成
u8 SYN_ChackCom[] = {0XFD, 0X00, 0X02, 0X21, 0XDE}; //状态查询
u8 SYN_PowerDownCom[] = {0XFD, 0X00, 0X02, 0X88, 0X77}; //进入POWER DOWN 状态命令
void run()
{
TIM_SetCompare2(TIM1,1000);//设置TIMx捕获比较1寄存器值 此处为TIM1通道1 占空比为50%
PBout(12)=1;
PBout(13)=0;
PBout(0)=1;
PBout(1)=0;
}
void stop()
{
PBout(12)=0;
PBout(13)=0;
PBout(0)=0;
PBout(1)=0;
}
void shwo_Foat_to_u8(u8 x,u8 y,float a)
{
u8 qian,hou;
unsigned char b[7];
qian=(u8)a;//提取将整数部分
b[0]=qian/100+'0';
b[1]=qian/10%10+'0';
b[2]=qian%10+'0';
b[3]='.';
hou=(a-(u8)a)*100;
b[4]=hou/10%10+'0';
b[5]=hou%10+'0';
OLED_ShowString(x,y,b,16,1);
}
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
delay_init();
USART3_Init(9600);//设置语音播报的波特率
CESU_Init();
NVICinit();
KEY_Init();
LED_Init();
TB6612_Ctrl_Init();
TB6612_Config();
delay_init();
OLED_Init();
red_wire_Init();
float mile=0;
float money=0;
char date[20];
u8 startvalue=10;
u8 t=0;
u8 a=0;
u8 c=0;
OLED_ColorTurn(0);//0正常显示,1 反色显示
OLED_DisplayTurn(0);//0正常显示 1 屏幕翻转显示
OLED_ShowChinese(0,0,0,16,1);
OLED_ShowChinese(16,0,1,16,1);
OLED_ShowChinese(48,0,4,16,1);//每
OLED_ShowChinese(64,0,5,16,1);//公
OLED_ShowChinese(80,0,6,16,1);//理
OLED_ShowString(96,0,"2.5",16,1);
OLED_ShowChinese(0,48,11,16,1);//里
OLED_ShowChinese(16,48,12,16,1);//程
OLED_ShowChinese(32,48,15,16,1);//:
OLED_ShowChinese(0,16,13,16,1);//价
OLED_ShowChinese(16,16,14,16,1);//格
OLED_ShowChinese(32,16,15,16,1);
while(1)
{
mile=(quan/2)*0.196;
money=startvalue+mile*2.5;
t=KEY_Scan(0); //得到键值
switch(t)
{
case KEY0_PRES: LED0=1;
run();
break;
case KEY1_PRES:
LED1=0;
stop();
break;
case WKUP_PRES:
LED1=1; stop();
sprintf(date,"%s%.2f%s%s%.2f%s","本次行程结束共计行驶",mile,"公里","共消费",money,"元");
SYN_FrameInfo(6,(uint8_t *)date);
delay_ms(9600);
quan=0;a=0;c=0;
break;
default:
delay_ms(10);
}
shwo_Foat_to_u8(48,48,mile);
OLED_ShowString(108,48,"KM",16,1);
shwo_Foat_to_u8(48,16,money);
OLED_ShowChinese(108,16,7,16,1);
OLED_Refresh();
if(a==0)
{
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_6)==1)
{
a++;
delay_ms(10);
if(GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_6)==SET)
{
LED0=!LED0;
SYN_FrameInfo(0,"欢迎乘坐本次出租车本车起步价十元白天2.5元每公里夜晚3.5元每公里");
}
}
}
}
}














 396
396











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









