







Cite:
【1】 维基百科.伯格斯方程
【2】 DeepXDE.伯格斯方程求解
1. what‘s Burgers equation
2. Solve Burgers equation by DeepXDE
Burgers equation:
d
u
d
t
+
u
d
u
d
x
=
v
d
2
u
d
x
2
,
x
∈
[
−
1
,
1
]
,
t
∈
[
0
,
1
]
(1)
\frac{du}{dt} + u\frac{du}{dx} = v\frac{d^2u}{dx^2} ,\; x\in [-1,1] , \; t \in [0,1] \tag{1}
dtdu+udxdu=vdx2d2u,x∈[−1,1],t∈[0,1](1)
Dirichlet boundary conditions and initial conditions
u
(
−
1
,
t
)
=
u
(
1
,
t
)
=
0
,
u
(
x
,
0
)
=
−
s
i
n
(
π
x
)
u(-1,t) = u(1,t) = 0, \; u(x,0) = -sin(\pi x)
u(−1,t)=u(1,t)=0,u(x,0)=−sin(πx)
reference solution: here
import deepxde as dde
import numpy as np
import matplotlib.pyplot as plt
def gen_testdata():
"""
generate test data with react synthetic result
"""
data = np.load("../deepxde/examples/dataset/Burgers.npz")
t, x, exact = data["t"], data["x"], data["usol"].T
xx, tt = np.meshgrid(x, t)
X = np.vstack((np.ravel(xx), np.ravel(tt))).T
y = exact.flatten()[:, None]
return X, y
def pde(x, y):
dy_x = dde.grad.jacobian(y, x, i=0, j=0)
dy_t = dde.grad.jacobian(y, x, i=0, j=1)
dy_xx = dde.grad.hessian(y, x, i=0, j=0)
return dy_t + y * dy_x - 0.01 / np.pi * dy_xx
geom = dde.geometry.Interval(-1, 1)
timedomain = dde.geometry.TimeDomain(0, 0.99)
# define Geometry and time domain,and we combine both the domain using GeometryXTime
geomtime = dde.geometry.GeometryXTime(geom, timedomain)
bc = dde.DirichletBC(geomtime, lambda x: 0, lambda _, on_boundary: on_boundary)
ic = dde.IC(
geomtime, lambda x: -np.sin(np.pi * x[:, 0:1]), lambda _, on_initial: on_initial
)
data = dde.data.TimePDE(
geomtime, pde, [bc, ic], num_domain=2540, num_boundary=80, num_initial=160
)
net = dde.maps.FNN([2] + [20] * 3 + [1], "tanh", "Glorot normal")
model = dde.Model(data, net)
# Now, we have the PDE problem and the network. We bulid a Model and choose the optimizer and learning rate
model.compile("adam", lr=1e-3)
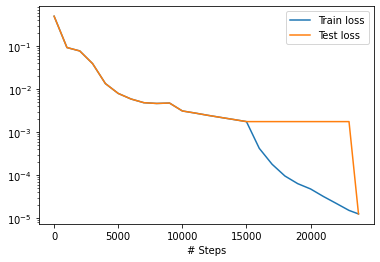
# We then train the model for 15000 iterations:
model.train(epochs=15000)
# After we train the network using Adam, we continue to train the network using L-BFGS to achieve a smaller loss:
model.compile("L-BFGS")
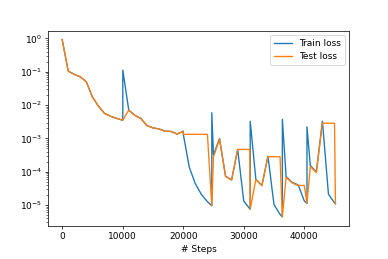
losshistory, train_state = model.train()
dde.saveplot(losshistory, train_state, issave=True, isplot=True)
X, y_true = gen_testdata()
y_pred = model.predict(X)
f = model.predict(X, operator=pde)
print("Mean residual:", np.mean(np.absolute(f)))
print("L2 relative error:", dde.metrics.l2_relative_error(y_true, y_pred))
np.savetxt("test.dat", np.hstack((X, y_true, y_pred)))
Mean residual: 0.033188015
L2 relative error: 0.17063112901692742
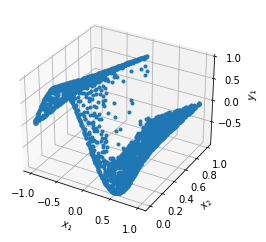
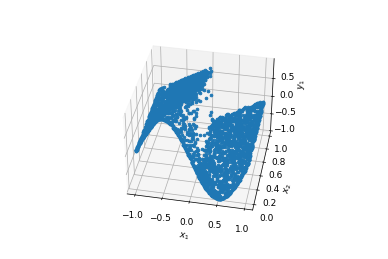
%matplotlib notebook
import matplotlib.pyplot as plt
fig = plt.figure()
ax = plt.axes(projection='3d')
ax.plot3D(X[:,0].reshape(-1),X[:,1].reshape(-1),y_true.reshape(-1),'red')
ax.plot3D(X[:,0].reshape(-1),X[:,1].reshape(-1),y_pred.reshape(-1),'blue',alpha=0.5)
plt.show()
2. Burgers RAR
函数定义和上面是一样的,这里地RAR地目的在于不断减小函数拟合地误差到一个指定地误差范围之下。控制误差的大小。
import deepxde as dde
import numpy as np
def gen_testdata():
data = np.load("../deepxde/examples/dataset/Burgers.npz")
t, x, exact = data["t"], data["x"], data["usol"].T
xx, tt = np.meshgrid(x, t)
X = np.vstack((np.ravel(xx), np.ravel(tt))).T
y = exact.flatten()[:, None]
return X, y
def pde(x, y):
dy_x = dde.grad.jacobian(y, x, i=0, j=0)
dy_t = dde.grad.jacobian(y, x, i=0, j=1)
dy_xx = dde.grad.hessian(y, x, i=0, j=0)
return dy_t + y * dy_x - 0.01 / np.pi * dy_xx
geom = dde.geometry.Interval(-1, 1)
timedomain = dde.geometry.TimeDomain(0, 0.99)
geomtime = dde.geometry.GeometryXTime(geom, timedomain)
bc = dde.DirichletBC(geomtime, lambda x: 0, lambda _, on_boundary: on_boundary)
ic = dde.IC(
geomtime, lambda x: -np.sin(np.pi * x[:, 0:1]), lambda _, on_initial: on_initial
)
data = dde.data.TimePDE(
geomtime, pde, [bc, ic], num_domain=2500, num_boundary=100, num_initial=160
)
net = dde.maps.FNN([2] + [20] * 3 + [1], "tanh", "Glorot normal")
model = dde.Model(data, net)
model.compile("adam", lr=1.0e-3)
model.train(epochs=10000)
model.compile("L-BFGS")
model.train()
X = geomtime.random_points(100000)
err = 1
while err > 0.005:
f = model.predict(X, operator=pde)
err_eq = np.absolute(f)
err = np.mean(err_eq)
print("Mean residual: %.3e" % (err))
x_id = np.argmax(err_eq)
print("Adding new point:", X[x_id], "\n")
data.add_anchors(X[x_id])
early_stopping = dde.callbacks.EarlyStopping(min_delta=1e-4, patience=2000)
model.compile("adam", lr=1e-3)
model.train(epochs=10000, disregard_previous_best=True, callbacks=[early_stopping])
model.compile("L-BFGS")
losshistory, train_state = model.train()
dde.saveplot(losshistory, train_state, issave=True, isplot=True)
X, y_true = gen_testdata()
y_pred = model.predict(X)
print("L2 relative error:", dde.metrics.l2_relative_error(y_true, y_pred))
np.savetxt("test.dat", np.hstack((X, y_true, y_pred)))
L2 relative error: 0.009516824350586142
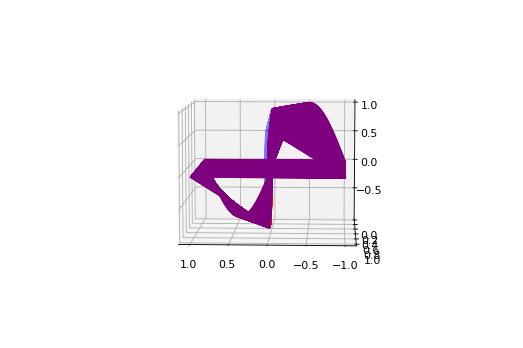
%matplotlib notebook
import matplotlib.pyplot as plt
fig = plt.figure()
ax = plt.axes(projection='3d')
ax.plot3D(X[:,0].reshape(-1),X[:,1].reshape(-1),y_true.reshape(-1),'red')
ax.plot3D(X[:,0].reshape(-1),X[:,1].reshape(-1),y_pred.reshape(-1),'blue',alpha=0.5)
plt.show()

4. summary
- 迭代更多的次数,在方程拟合的过程中可能会获得更好的结果,但是也可能陷入一些局部最优值,LR的影响还是挺大的
- 两次对比,第二次固定一个最大容忍误差值进行判断,最终得到一个误差非常小的模型。这对于PINN的训练而言似乎是一个可行的方案,因为一般不存在过拟合的问题。
- 注意我们的PINN方法是一个无监督学习过程。
- 对于二维的Burgers方程的训练和预测速度都还是非常快的,尽管我的GPU非常普通。暂时对于我是可以容忍的!!!















 179
179











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











