




使用电脑浏览网页时,您是否遇到过某些网站加载缓慢、排版错乱或功能无法正常使用的情况?这很可能是由于浏览器内核与网页代码不兼容导致的。360极速浏览器凭借其独特的“双核”引擎(极速内核与IE兼容内核),能够智能切换以适应不同网页需求。本文将为您详细介绍如何设置360极速浏览器的兼容模式,帮助您一键解决各类网页兼容性问题。
什么是兼容模式?
360极速浏览器采用“双核”技术:
- 极速模式:基于Chromium内核,速度快、效率高,适用于大多数现代网站。
- 兼容模式:基于Trident(IE)内核,主要用于支持一些老旧的网页系统,如银行网银、政府网站、企业OA系统等。
当您访问某些需要IE环境才能正常运行的网站时,手动切换至“兼容模式”即可恢复正常浏览。
方法一:通过地址栏闪电图标快速切换(推荐)
这是最简单快捷的方式,适合临时切换当前页面的浏览模式。
双击桌面上的“360极速浏览器”图标,启动浏览器程序。在浏览器顶部的地址栏右侧,您会看到一个类似“闪电”的图标(⚡),它代表当前页面所使用的内核模式。

点击该闪电图标;在弹出的菜单中选择“兼容模式”;页面将自动刷新,并切换到IE内核运行。
切换后,闪电图标会变为“齿轮”形状(或显示为IE标志),表示已成功进入兼容模式。此时再尝试操作之前无法使用的功能,通常即可恢复正常。
小贴士:此设置默认仅对当前网站生效,下次访问同一站点时,浏览器会记住您的选择,无需重复设置。
方法二:通过高级设置进行全局或指定站点内核管理
如果您希望批量设置多个网站始终使用兼容模式,或者想自定义特定网站的内核规则,可以使用以下更高级的设置方式。
1、打开设置菜单
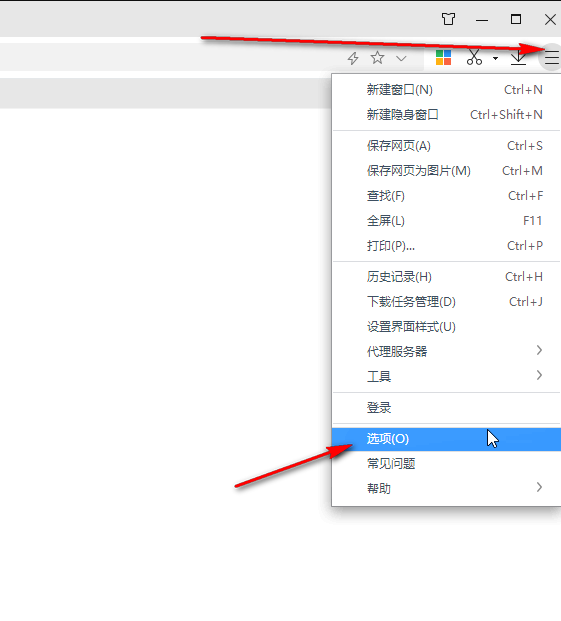
点击浏览器右上角的“三条横线”菜单按钮(☰);在下拉菜单中选择“选项”进入设置中心。
2、进入高级设置
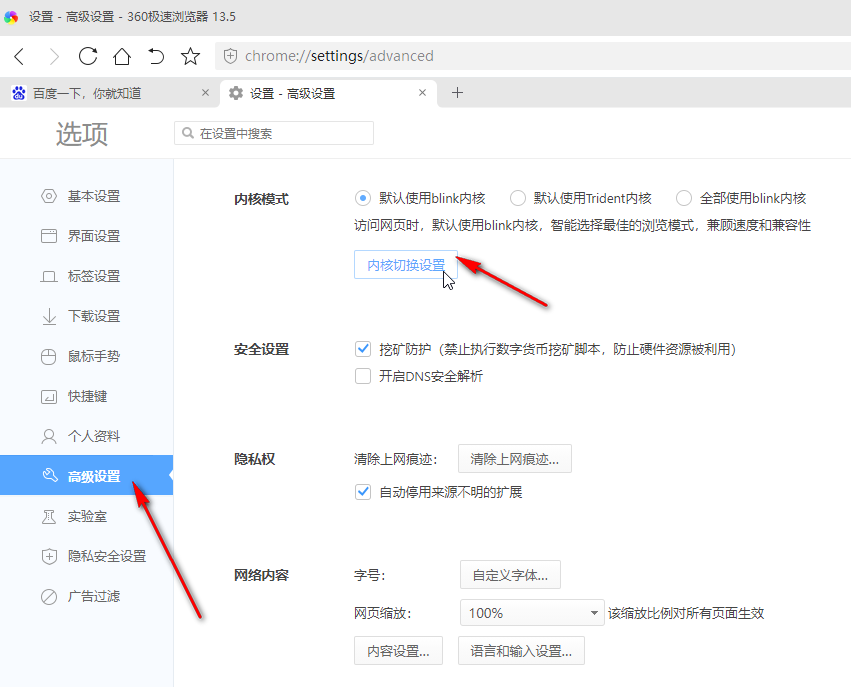
在左侧导航栏中点击“高级设置”;向下滚动,找到“内核切换设置”并点击进入。
3、配置内核偏好
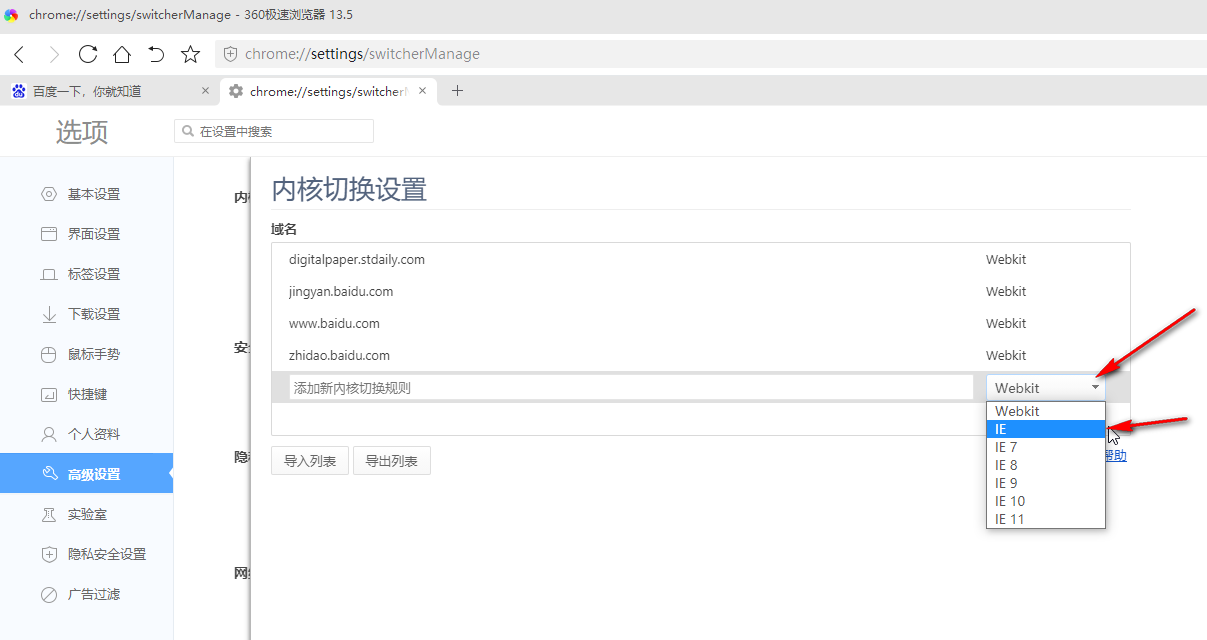
在“内核切换设置”界面中,您可以进行以下操作:
找到“使用兼容模式(IE内核)打开所有网页”选项,勾选后可强制所有页面默认使用兼容模式(不推荐,可能影响整体浏览速度)。
设置完成后,点击“应用”按钮保存更改。之后访问已设定的网站时,浏览器将自动切换至兼容模式,无需手动干预。
注意事项与常见问题解答
🔹 问:为什么切换后仍无法正常使用?
答:部分网站还需安装特定插件(如安全控件、ActiveX)。请确保已按提示完成相关组件的下载与安装。
🔹 问:能否让某个网站永远使用极速模式?
答:可以!在“内核切换设置”中添加该网站,并选择“极速模式”即可。
🔹 问:手机端是否支持兼容模式?
答:不支持。移动端设备普遍不再支持IE内核,建议在PC端处理此类业务。
🔹 问:频繁切换会影响浏览器性能吗?
答:不会。内核切换是轻量级操作,仅影响当前页面渲染方式,不影响整体系统资源占用。
总结
掌握360极速浏览器的兼容模式设置方法,不仅能有效解决各类网页显示异常问题,还能提升办公和办事效率。无论是通过地址栏一键切换,还是通过高级设置精细化管理,都能让您游刃有余地应对各种复杂的网络环境。
下次遇到网页“罢工”时,不妨试试切换到“兼容模式”,或许问题迎刃而解!好了,如果你还想了解更多关于电脑日常办公等软件使用方面的小技巧,可以持续关注简鹿办公。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









