






问题:
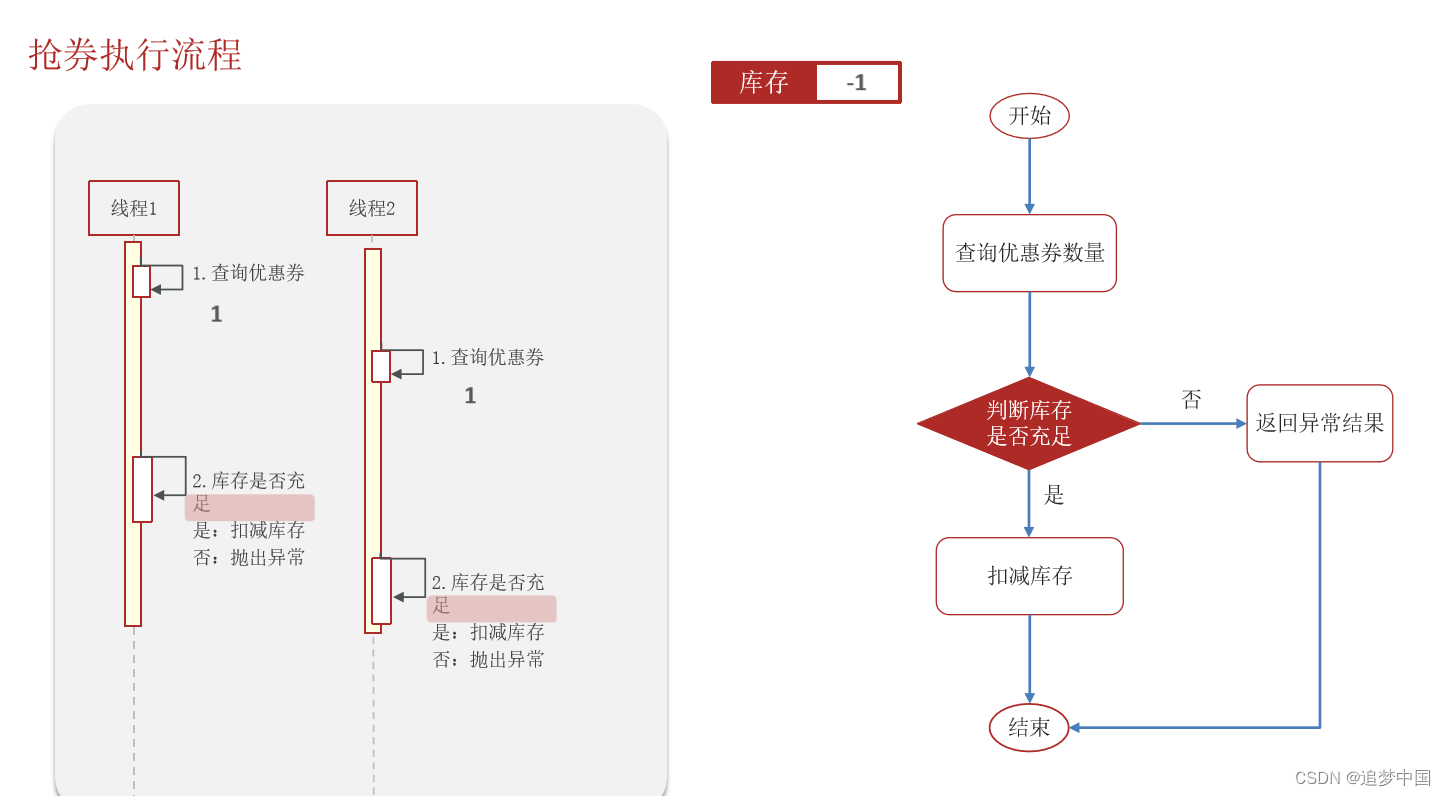
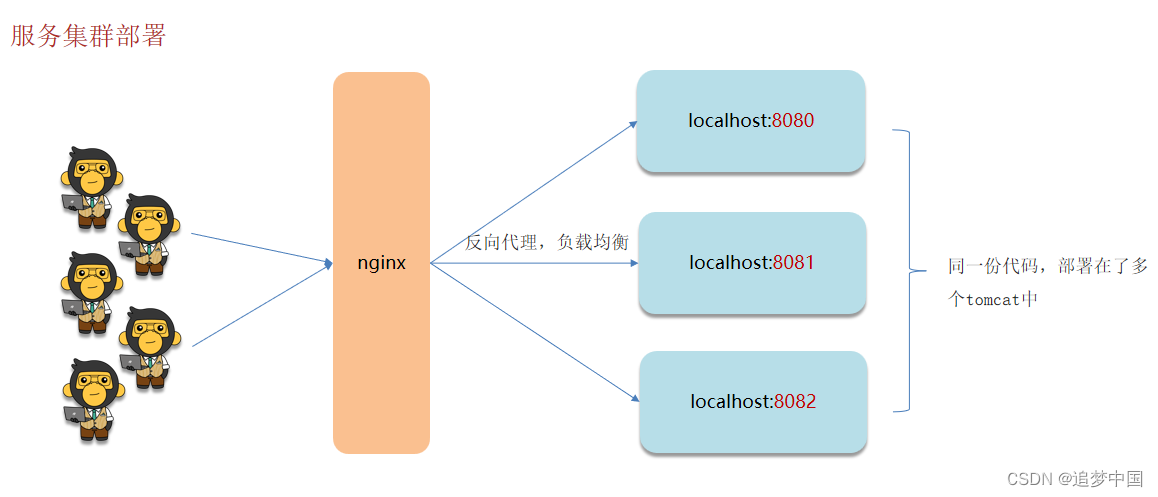
本地锁,服务集群环境存在问题
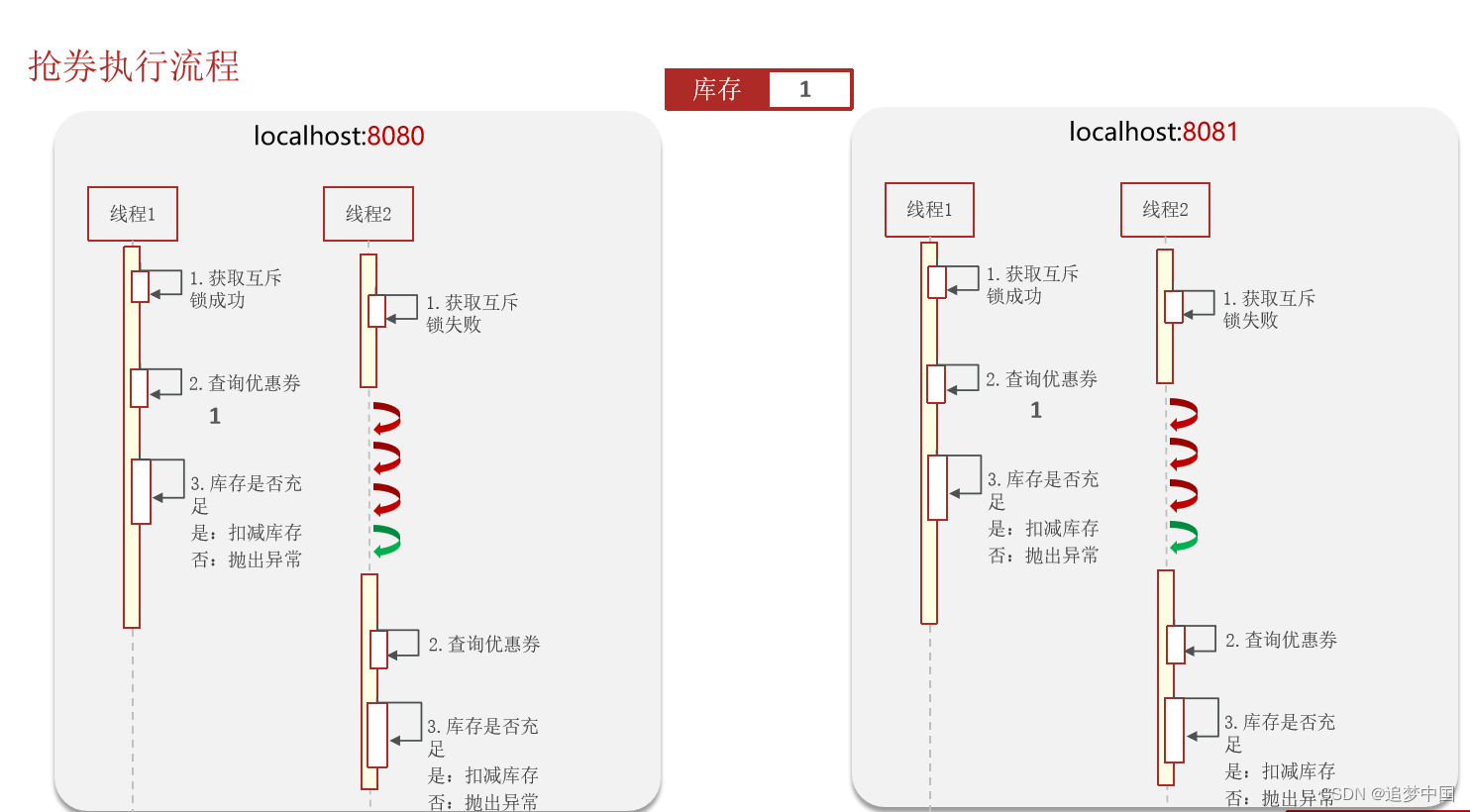
分布式锁
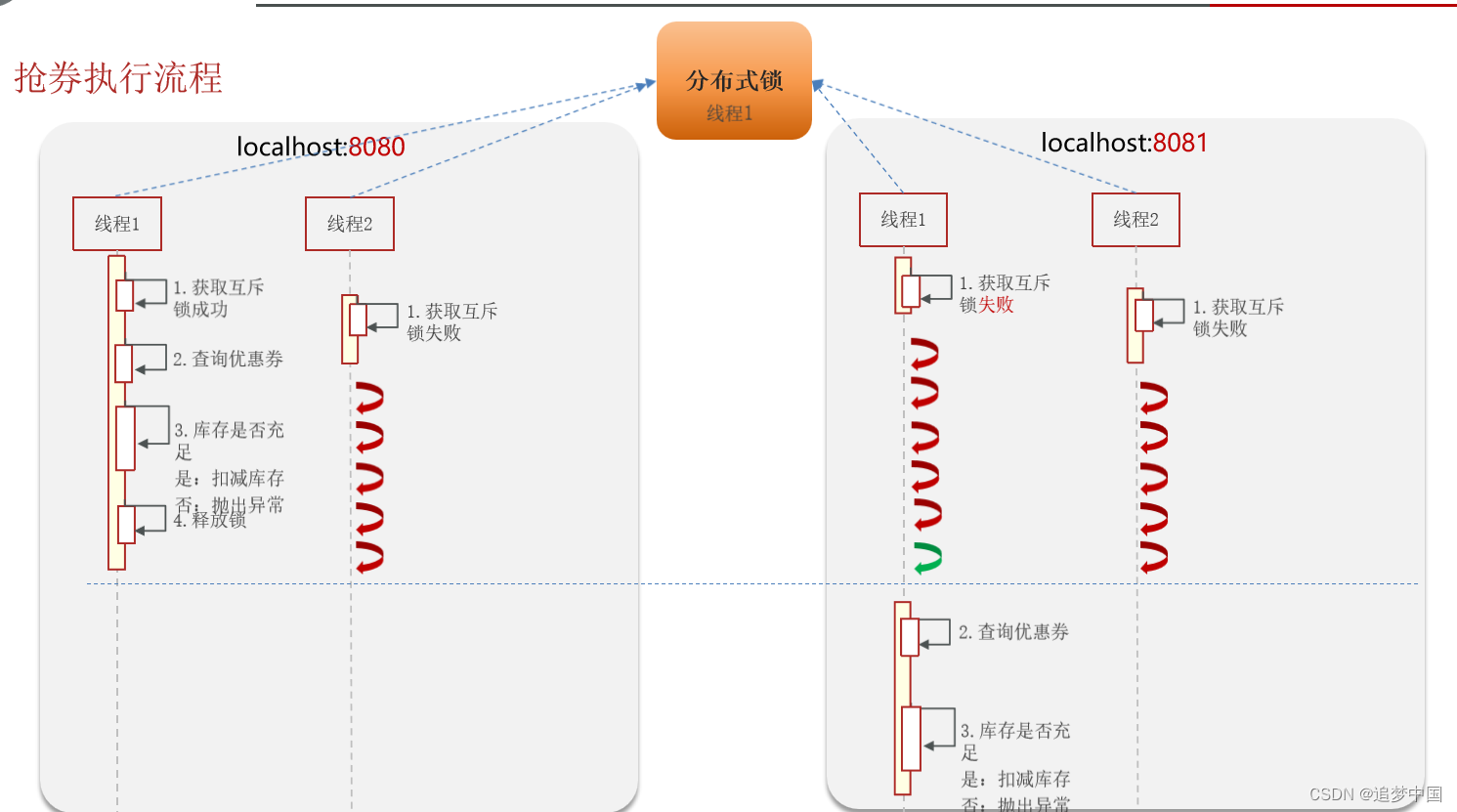
Redis实现分布式锁主要利用Redis的setnx命令。setnx是SET if not exists(如果不存在,则 SET)的简写。
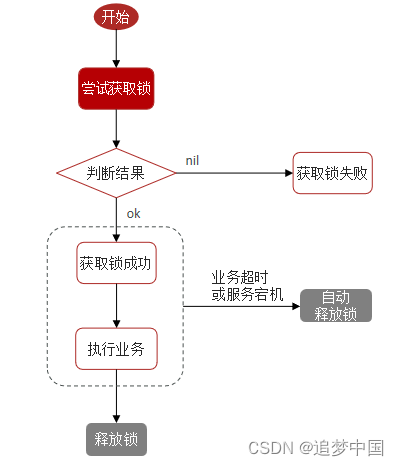
获取锁:
添加锁,NX是互斥、EX是设置超时时间
SET lock value NX EX 10
释放锁:
释放锁,删除即可
DEL key
Redis实现分布式锁如何合理的控制锁的有效时长?
1.根据业务执行时间预估
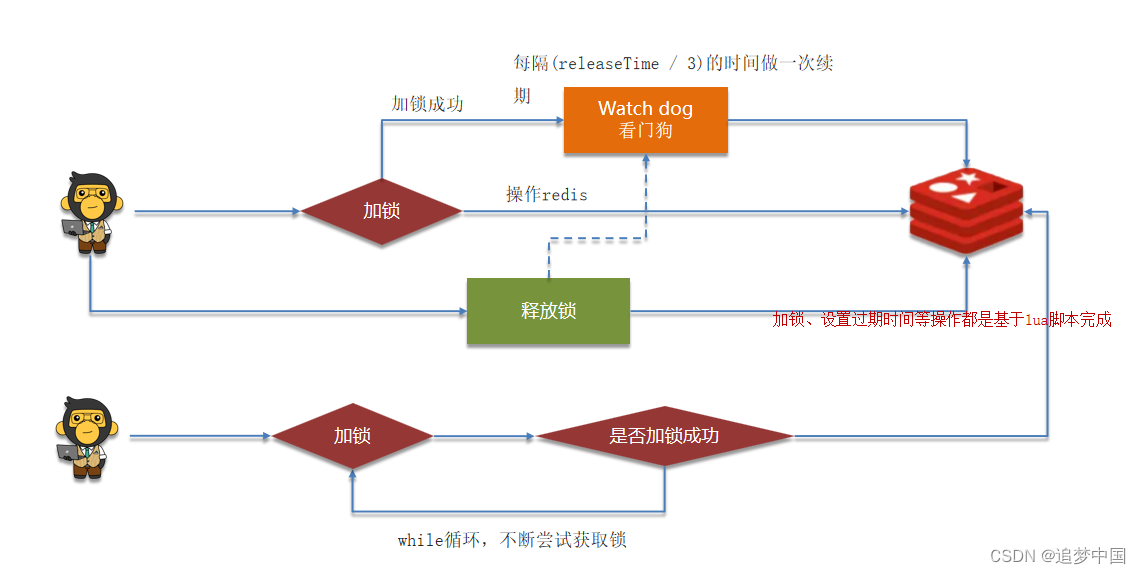
2.给锁续期
redisson实现的分布式锁-执行流程
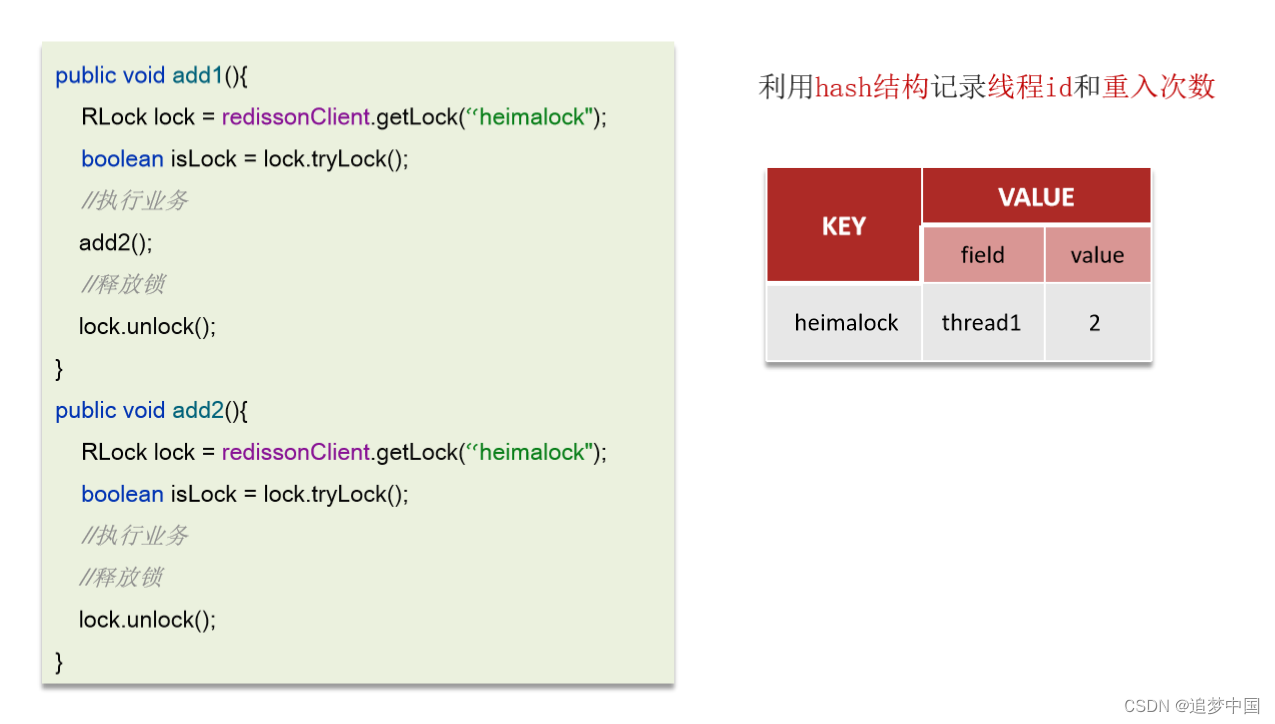
redisson实现的分布式锁-可重入
利用hash结构记录线程id和重入次数
在Redis中提供的集群方案
主从复制
哨兵模式
分片集群
主从复制
单节点Redis的并发能力是有上限的,要进一步提高Redis的并发能力,就需要搭建主从集群,实现读写分离

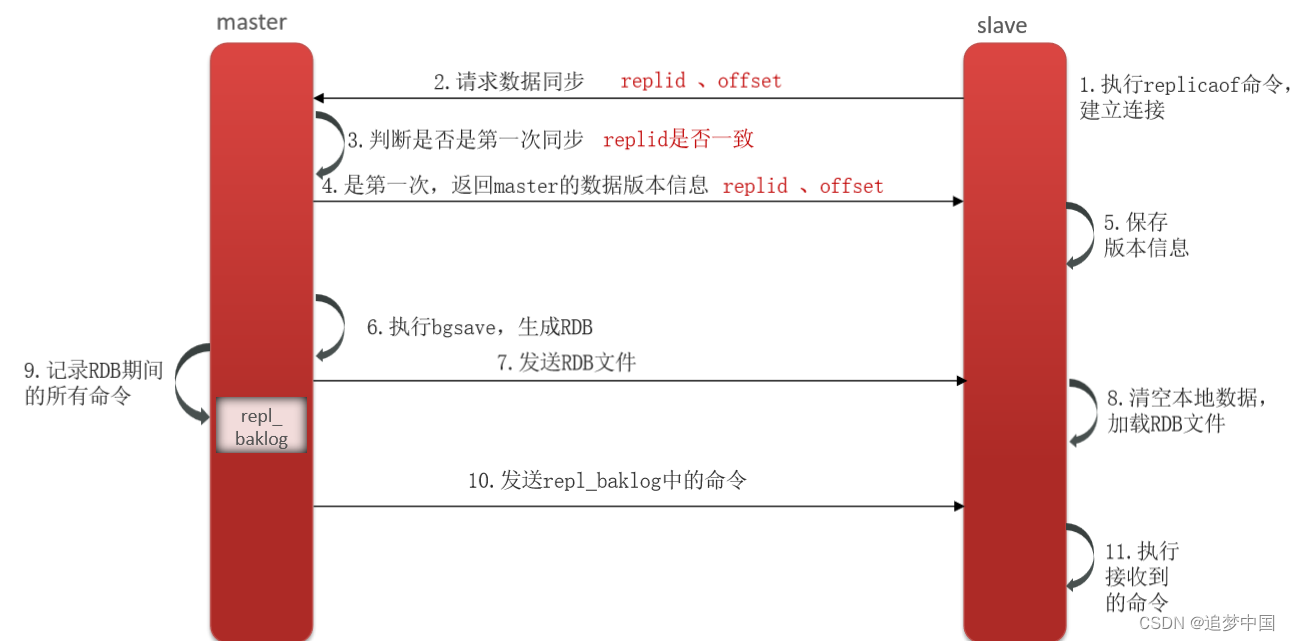
主从数据同步原理
主从全量同步:
Replication Id:简称replid,是数据集的标记,id一致则说明是同一数据集。每一个master都有唯一的replid,slave则会继承master节点的replid
offset:偏移量,随着记录在repl_baklog中的数据增多而逐渐增大。slave完成同步时也会记录当前同步的offset。如果slave的offset小于master的offset,说明slave数据落后于master,需要更新。
主从增量同步(slave重启或后期数据变化:

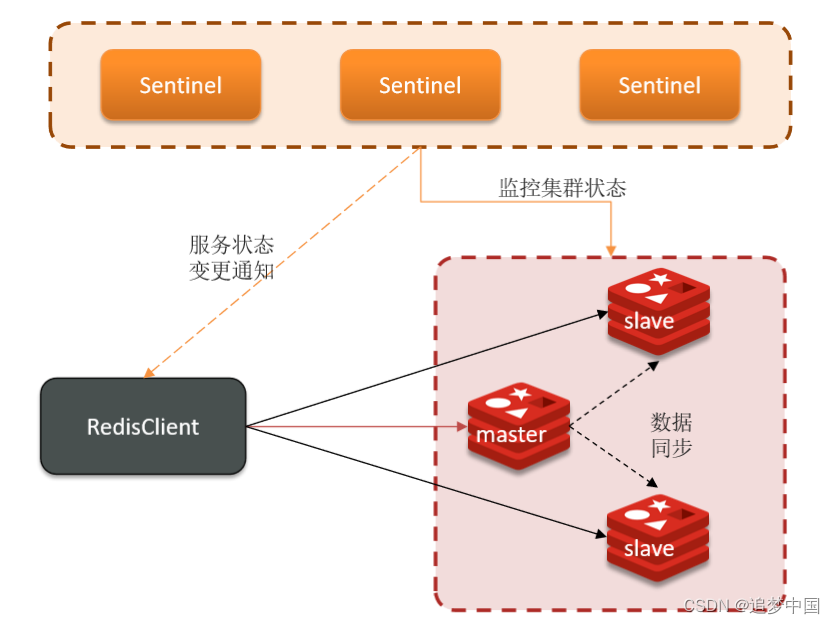
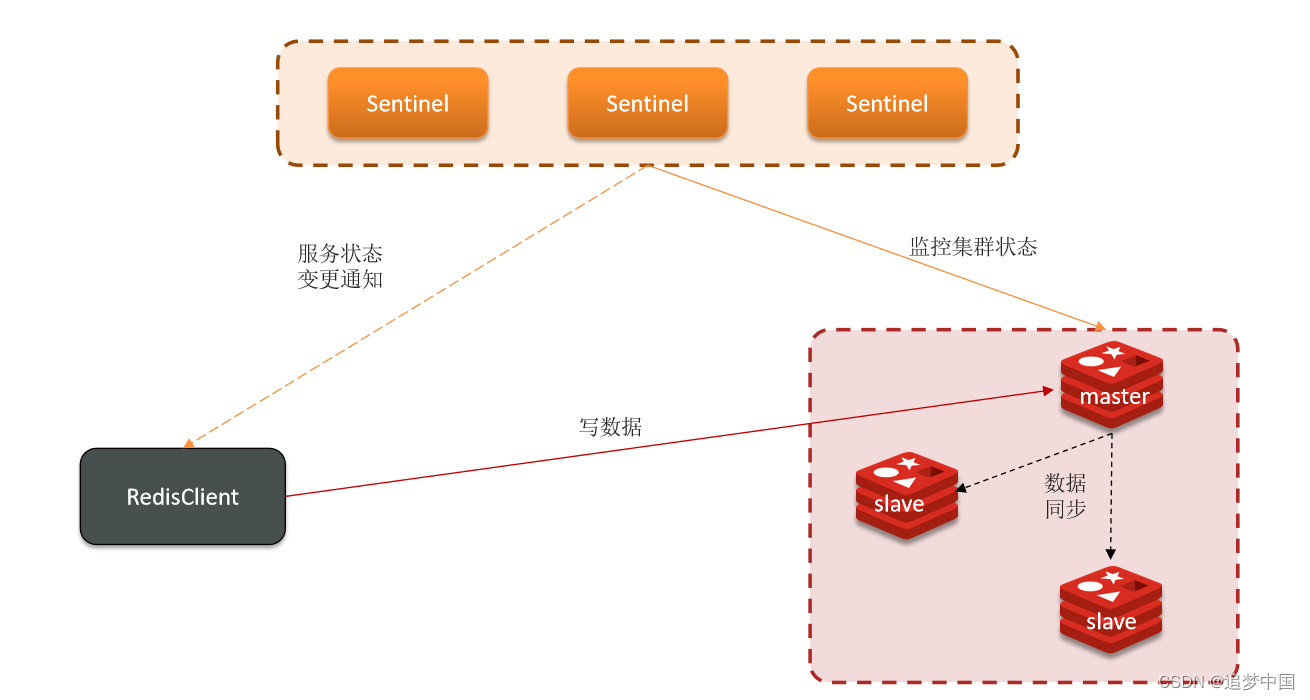
哨兵模式
Redis提供了哨兵(Sentinel)机制来实现主从集群的自动故障恢复。哨兵的结构和作用如下:
监控:Sentinel 会不断检查您的master和slave是否按预期工作
自动故障恢复:如果master故障,Sentinel会将一个slave提升为master。当故障实例恢复后也以新的master为主
通知:Sentinel充当Redis客户端的服务发现来源,当集群发生故障转移时,会将最新信息推送给Redis的客户端
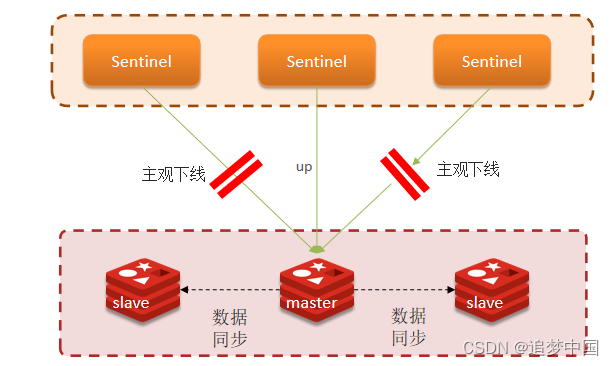
Sentinel基于心跳机制监测服务状态,每隔1秒向集群的每个实例发送ping命令:
主观下线:如果某sentinel节点发现某实例未在规定时间响应,则认为该实例主观下线。
客观下线:若超过指定数量(quorum)的sentinel都认为该实例主观下线,则该实例客观下线。quorum值最好超过Sentinel实例数量的一半。
哨兵选主规则:
首先判断主与从节点断开时间长短,如超过指定值就排该从节点
然后判断从节点的slave-priority值,越小优先级越高
如果slave-prority一样,则判断slave节点的offset值,越大优先级越高
最后是判断slave节点的运行id大小,越小优先级越高。
redis集群(哨兵模式)脑裂
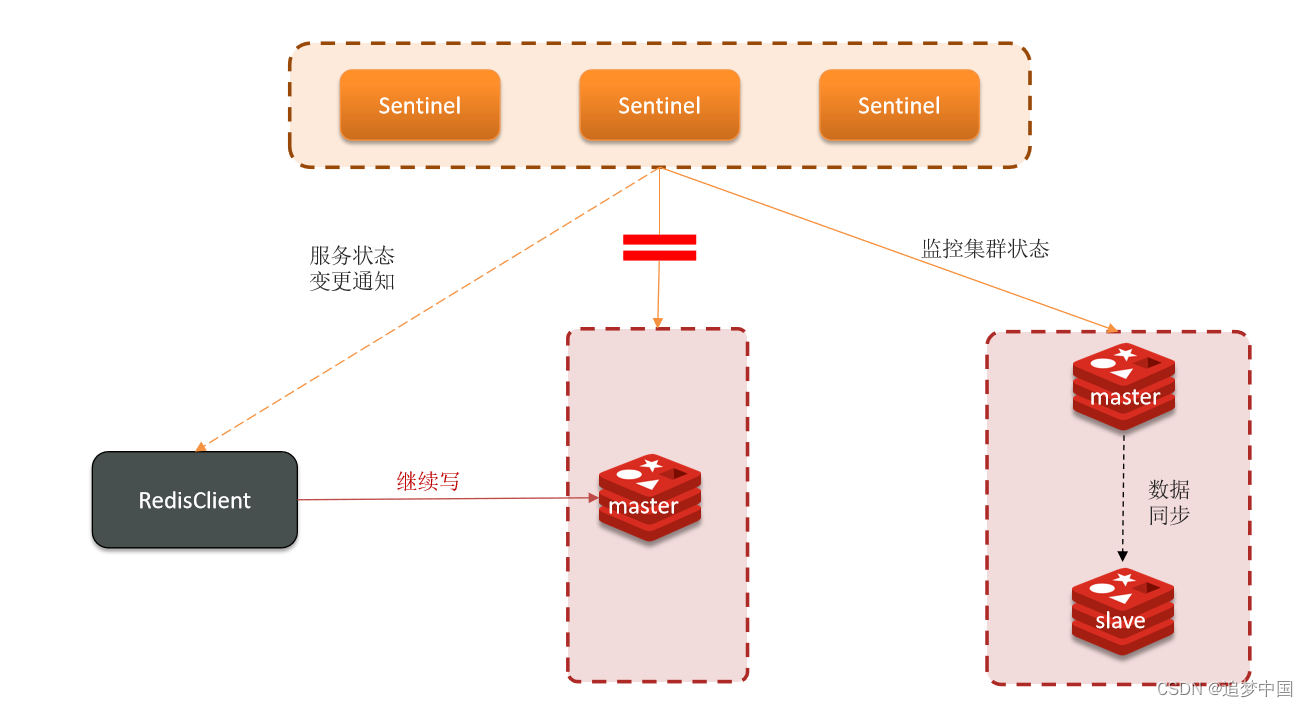
redis中有两个配置参数:
min-replicas-to-write 1 表示最少的salve节点为1个
min-replicas-max-lag 5 表示数据复制和同步的延迟不能超过5秒
分片集群结构
主从和哨兵可以解决高可用、高并发读的问题。但是依然有两个问题没有解决:
海量数据存储问题
高并发写的问题
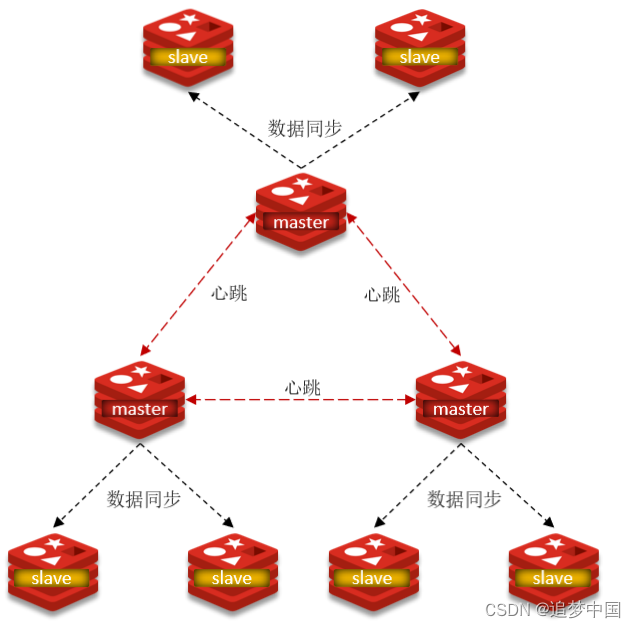
使用分片集群可以解决上述问题,分片集群特征:
集群中有多个master,每个master保存不同数据
每个master都可以有多个slave节点
master之间通过ping监测彼此健康状态
客户端请求可以访问集群任意节点,最终都会被转发到正确节点
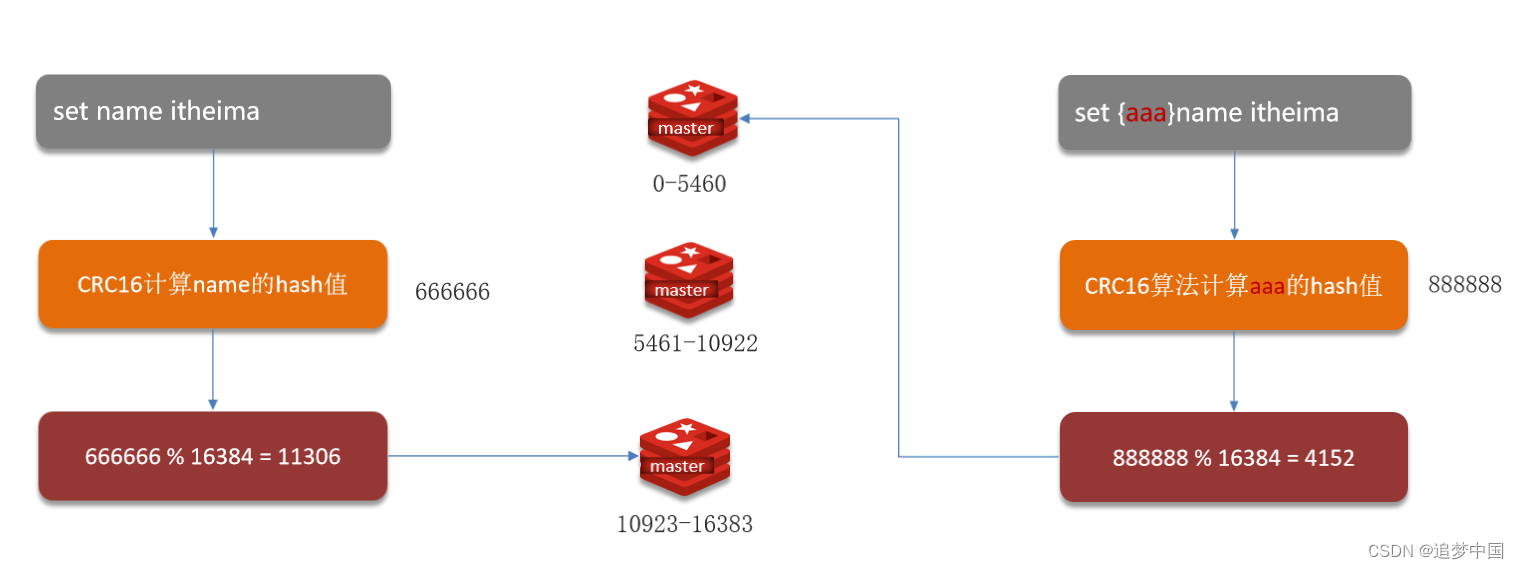
Redis 分片集群引入了哈希槽的概念,Redis 集群有 16384 个哈希槽,每个 key通过 CRC16 校验后对 16384 取模来决定放置哪个槽,集群的每个节点负责一部分 hash 槽。
Redis是单线程的,但是为什么还那么快
Redis是纯内存操作,执行速度非常快
采用单线程,避免不必要的上下文切换可竞争条件,多线程还要考虑线程安全问题
使用I/O多路复用模型,非阻塞IO
I/O多路复用模型
Redis是纯内存操作,执行速度非常快,它的性能瓶颈是网络延迟而不是执行速度, I/O多路复用模型主要就是实现了高效的网络请求
- 用户空间和内核空间
- 常见的IO模型
阻塞IO(Blocking IO) 非阻塞IO(Nonblocking IO) IO多路复用(IO Multiplexing) - Redis网络模型
用户空间和内核空间
- Linux系统中一个进程使用的内存情况划分两部分:内核空间、用户空间
- 用户空间只能执行受限的命令(Ring3),而且不能直接调用系统资源
(硬件系统),必须通过内核提供的接口来访问 - 内核空间可以执行特权命令(Ring0),调用一切系统资源(硬件系统)
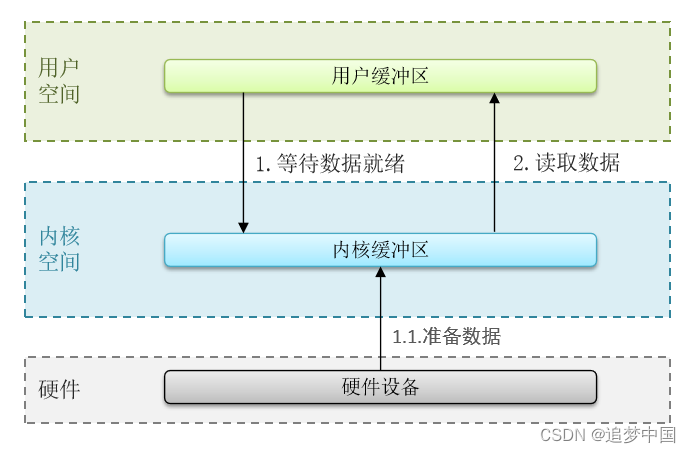
Linux系统为了提高IO效率,会在用户空间和内核空间都加入缓冲区:
- 写数据时,要把用户缓冲数据拷贝到内核缓冲区,然后写入设备
- 读数据时,要从设备读取数据到内核缓冲区,然后拷贝到用户缓冲区
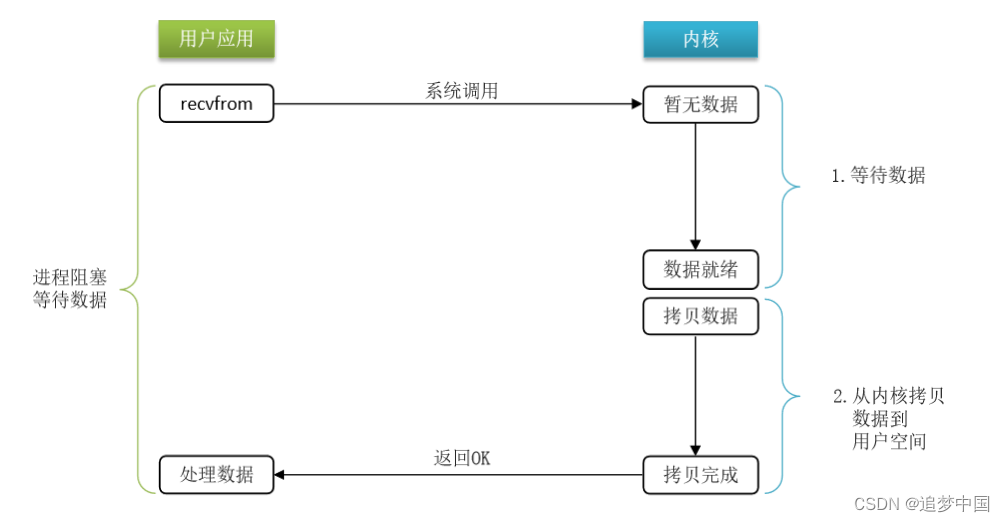
阻塞IO
阻塞IO就是两个阶段都必须阻塞等待:
阶段一:
- 用户进程尝试读取数据(比如网卡数据)
- 此时数据尚未到达,内核需要等待数据
- 此时用户进程也处于阻塞状态
阶段二:
- 数据到达并拷贝到内核缓冲区,代表已就绪
- 将内核数据拷贝到用户缓冲区
- 拷贝过程中,用户进程依然阻塞等待
- 拷贝完成,用户进程解除阻塞,处理数据
可以看到,阻塞IO模型中,用户进程在两个阶段都是阻塞状态。
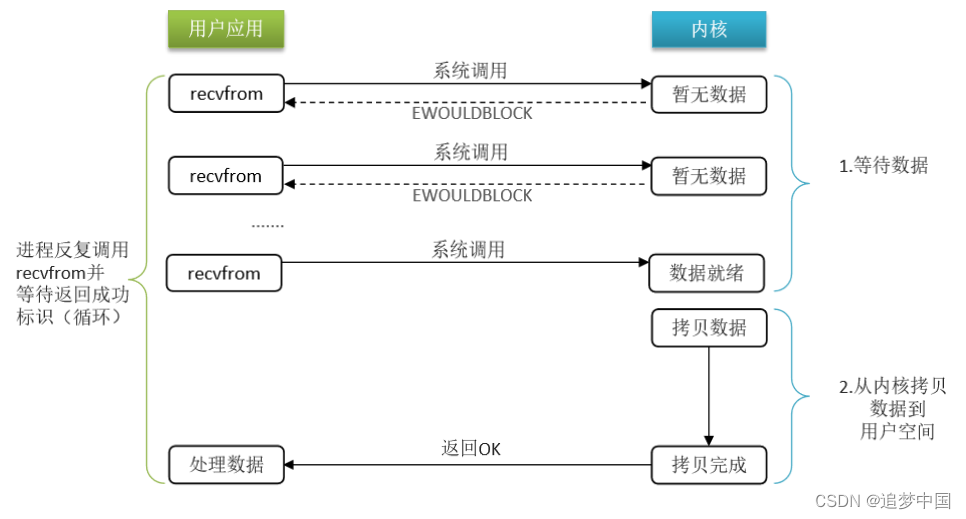
非阻塞IO
非阻塞IO的recvfrom操作会立即返回结果而不是阻塞用户进程。
阶段一:
- 用户进程尝试读取数据(比如网卡数据)
- 此时数据尚未到达,内核需要等待数据
- 返回异常给用户进程
- 用户进程拿到error后,再次尝试读取
- 循环往复,直到数据就绪
阶段二:
- 将内核数据拷贝到用户缓冲区
- 拷贝过程中,用户进程依然阻塞等待
- 拷贝完成,用户进程解除阻塞,处理数据
可以看到,非阻塞IO模型中,用户进程在第一个阶段是非阻塞,第二个阶段是阻塞状态。虽然是非阻塞,但性能并没有得到提高。而且盲等机制会导致CPU空转,CPU使用率暴增。
IO多路复用
IO多路复用是利用单个线程来同时监听多个Socket ,并在某个Socket可读、可写时得到通知,从而避免无效的等待,充分利用CPU资源。不过监听Socket的方式、通知的方式又有多种实现,常见的有:
- select
- poll
- epoll
差异:
- select和poll只会通知用户进程有Socket就绪,但不确定具体是哪个Socket ,需要用户进程逐个遍历Socket来确认
- epoll则会在通知用户进程Socket就绪的同时,把已就绪的Socket写入用户空间
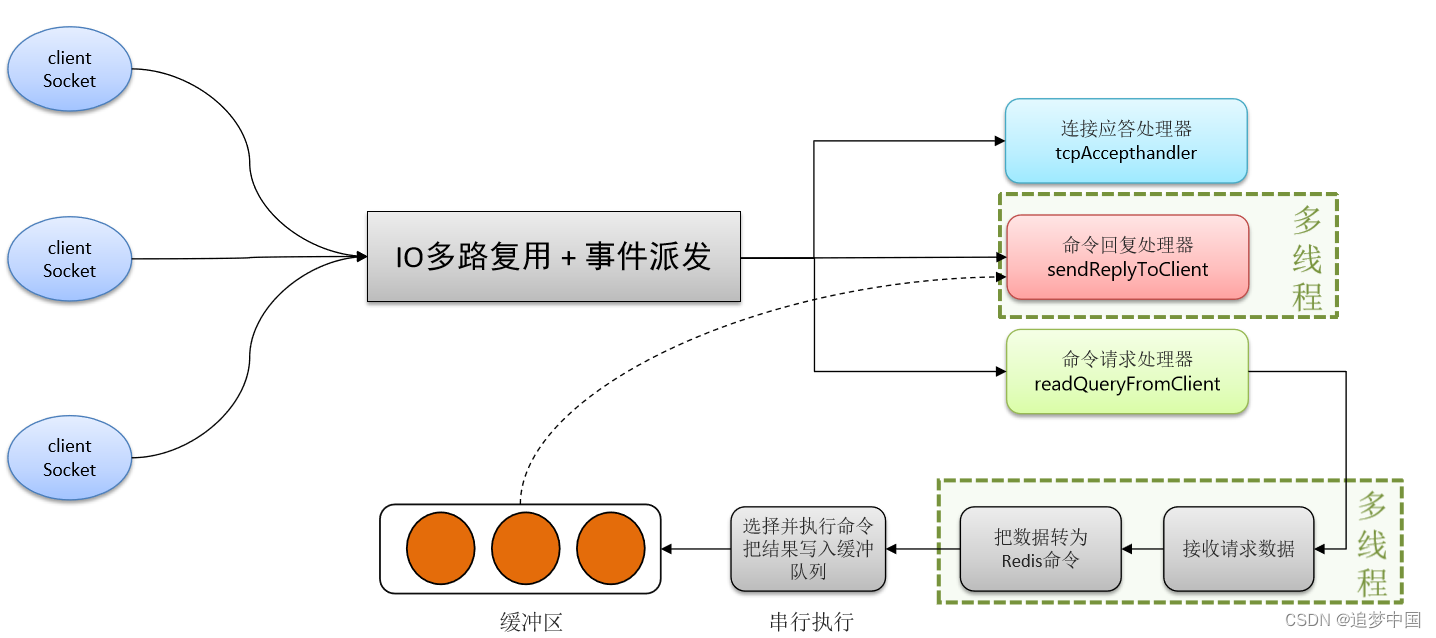
Redis网络模型
Redis通过IO多路复用来提高网络性能,并且支持各种不同的多路复用实现,并且将这些实现进行封装, 提供了统一的高性能事件库
I/O多路复用
是指利用单个线程来同时监听多个Socket ,并在某个Socket可读、可写时得到通知,从而避免无效的等待,充分利用CPU资源。目前的I/O多路复用都是采用的epoll模式实现,它会在通知用户进程Socket就绪的同时,把已就绪的Socket写入用户空间,不需要挨个遍历Socket来判断是否就绪,提升了性能。
Redis网络模型
就是使用I/O多路复用结合事件的处理器来应对多个Socket请求
- 连接应答处理器
- 命令回复处理器,在Redis6.0之后,为了提升更好的性能,使用了多线程来处理回复事件
- 命令请求处理器,在Redis6.0之后,将命令的转换使用了多线程,增加命令转换速度,在命令执行的时候,依然是单线程















 603
603











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









