






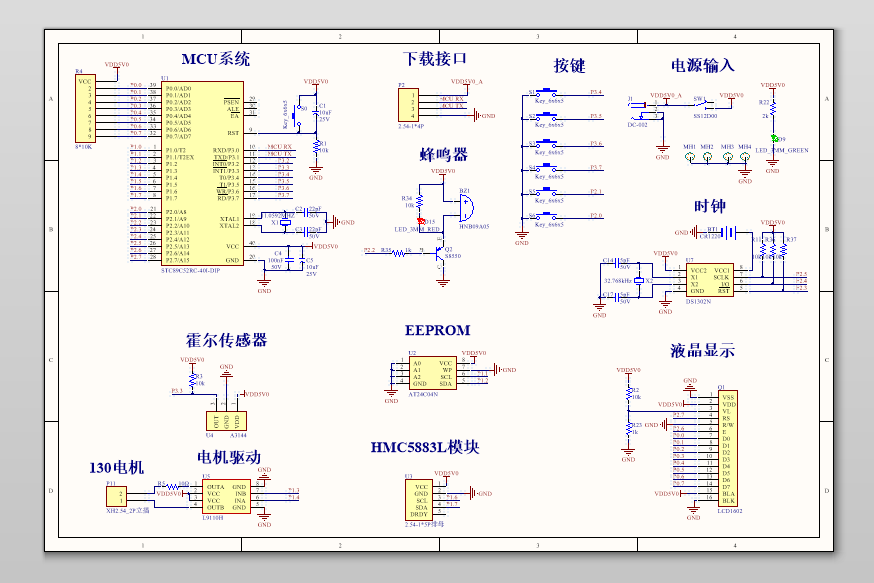
功能介绍:
0.本系统采用STC89C52作为单片机
1.采用LCD1602液晶可实时显示码表信息
2.蜂鸣器和LED组成声光报警电路,当速度超过设定的阈值启动报警
3.DS1302时钟芯片可实时显示系统时间
4.采用DC002作为电源接口可直接输入5V给整个系统供电
5.设计的EEPROM支持掉电数据保存,下次使用可查看上次码表记录的相关信息
6.方位传感器采用HMC5883L模块,支持自行车或其他载体的方位信息
7.采用小电机和霍尔传感器模拟车子运动的过程
原理图:
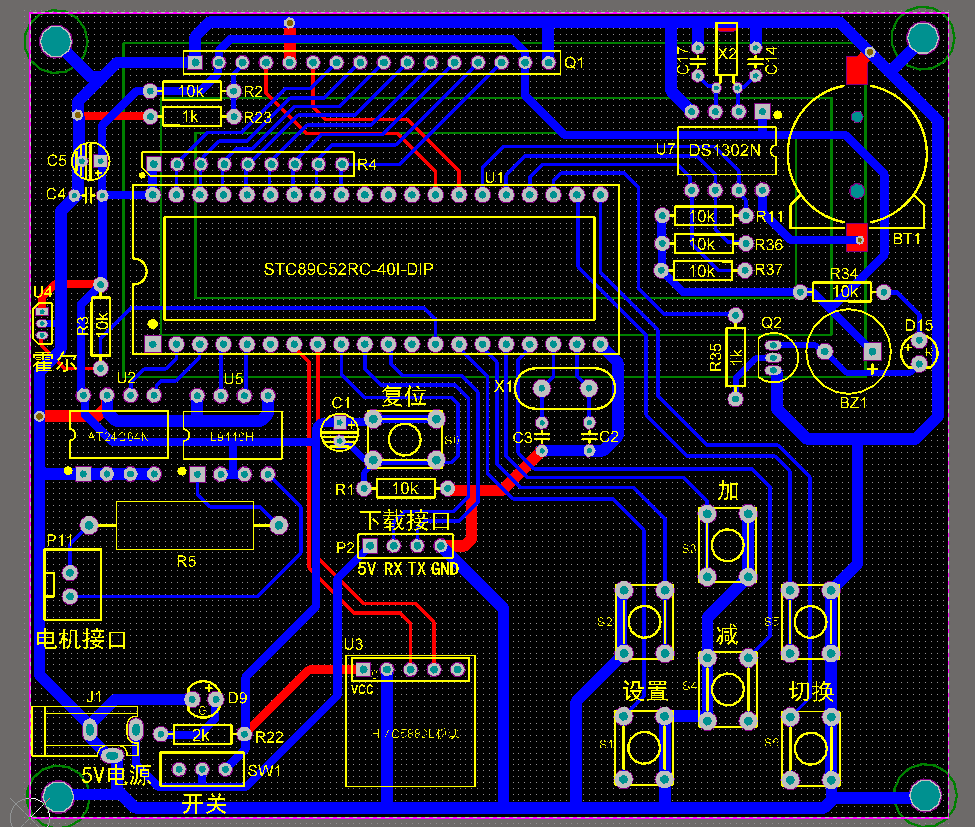
PCB:
主程序:
#include "main.h"
#define DIAMETER 20 //直径,单位mm
float distance = 0; //单位m
float totalDistBuf = 0; //单位m
float rate = 0; //单位km/h
float totalDist = 0; //单位km
unsigned char rateAlarm = 30; //单位km/h
unsigned char second = 0;
unsigned char minute = 0;
unsigned long pulseCnt = 0;
bit dispFlag = 1;
bit setTimeFlag = 0;
bit setAlarmFlag = 0;
bit motorFlag = 0;
bit refreshFlag = 0;
bit writeFlag = 0;
bit isNewFlag = 1;
unsigned char pwmValue = 8;
unsigned char setIndex = 0;
unsigned char xdata dispRow0[16];
unsigned char xdata dispRow1[16];
enum{
DISP_RATE_MODE, DISP_DIR_MODE, DISP_TIME_MODE, SET_ALARM_MODE
} dispMode;
void main()
{
MOTOR = 0;
MOTOR_N = 0; //电机关闭
//初始化
LCD_Init();
DS1302_Init();
EEPROM_Init();
// EEPROM_WriteByte(IS_NEW_ADDR, 1); //将芯片设为新芯片
ReadEEPROM();
// isNewFlag = 1;
if (isNewFlag != 0) //新芯片
{
EEPROM_WriteByte(IS_NEW_ADDR, 0);
//给出初始值
rateAlarm = 30;
totalDist = 0;
WriteEEPROM();
}
DS1302_ReadTime();
Timer0_Init();
Timer1_Init();
EXT1_Init();
//开机显示
LCD_DispStr(0, 0, " Welcome! ");
HMC5883_Init();
DelayS(2);
LCD_Clear();
while(1)
{
//每秒钟更新数据
if (refreshFlag == 1)
{
distance = distance + DIAMETER * 2 * 3.14 * (float)pulseCnt / 1000 ; //单位m
totalDist = totalDist + DIAMETER * 2 * 3.14 * (float)pulseCnt / 1000; //单位km
rate = 3.6 * DIAMETER * 2 * 3.14 * (float)pulseCnt / 1000; //单位km/h
pulseCnt = 0;
EX1 = 1;
refreshFlag = 0;
}
//每分钟写一次EEPROM
if (writeFlag == 1)
{
if (totalDist != totalDistBuf) //里程是否发生变化
{
WriteEEPROM();
}
totalDistBuf = totalDist;
writeFlag = 0;
}
//显示函数
if (dispFlag == 1)
{
if (dispMode == DISP_RATE_MODE) //显示速度
{
DispRate();
}
else if (dispMode == DISP_DIR_MODE) //显示方向
{
DispDirection();
}
else if (dispMode == DISP_TIME_MODE) //显示时间
{
if (setTimeFlag == 0)
{
DS1302_ReadTime();
DispTime(setIndex, setTimeFlag);
}
}
else if (dispMode == SET_ALARM_MODE) //显示报警速度
{
if (setAlarmFlag == 0)
{
// ReadEEPROM();
if (totalDist != totalDistBuf)
{
WriteEEPROM();
}
totalDistBuf = totalDist;
DispAlarm(setIndex, setAlarmFlag);
}
}
}
//超速报警
if (rate > rateAlarm)
{
BUZZER = 0;
}
else
{
BUZZER = 1;
}
KeyProcess();
}
}
void ReadEEPROM(void)
{
isNewFlag = EEPROM_ReadByte(IS_NEW_ADDR);
rateAlarm = EEPROM_ReadByte(IS_NEW_ADDR + 1);
totalDist = EEPROM_ReadByte(IS_NEW_ADDR + 2);
totalDist = ((unsigned int)totalDist << 8) | EEPROM_ReadByte(IS_NEW_ADDR + 3);
}
void WriteEEPROM(void)
{
EEPROM_WriteByte(IS_NEW_ADDR + 1, rateAlarm);
EEPROM_WriteByte(IS_NEW_ADDR + 2, (((unsigned int)totalDist & 0xFF00) >> 8));
EEPROM_WriteByte(IS_NEW_ADDR + 3, ((unsigned int)totalDist & 0x00FF));
}
void DispDirection(void) //显示方向
{
xdata char dis[16];
xdata float GaX, GaY;
xdata unsigned int angle;
HMC5883_MultipleRead();
GaX = (float)(BUF[0] << 8 | BUF[1]) / 1090; // Combine MSB and LSB of X Data output register
//GaZ = (BUF[2] << 8 | BUF[3]) / 1090; // Combine MSB and LSB of Z Data output register
GaY = (float)(BUF[4] << 8 | BUF[5]) / 1090; // Combine MSB and LSB of Y Data output register
if ((GaX > 0) && (GaY > 0))
angle = atan(GaY / GaX) * 57;
else if ((GaX > 0) && (GaY < 0))
angle = 360 + atan(GaY / GaX) * 57;
else if ((GaX == 0) && (GaY > 0))
angle = 90;
else if ((GaX == 0) && (GaY < 0))
angle = 270;
else if (GaX < 0)
angle = 180 + atan(GaY / GaX) * 57;
angle = angle + 90 - 37; //手动校正
if (angle >= 360)
{
angle = angle - 360;
}
LCD_DispStr(0, 0, "You are heading ");
sprintf(dis, " A:%03d", angle);
LCD_DispStr(0, 1, dis);
LCD_DispOneChar(7, 1, 0xdf);
if ((angle < 22.5) || (angle > 337.5))
{
LCD_DispStr(10, 1, "N ");
}
else if ((angle >= 22.5) && (angle < 67.5))
{
LCD_DispStr(10, 1, "N-E");
}
else if ((angle >= 67.5) && (angle < 112.5))
{
LCD_DispStr(10, 1, "E ");
}
else if ((angle >= 112.5) && (angle < 157.5))
{
LCD_DispStr(10, 1, "S-E");
}
else if ((angle >= 157.5) && (angle < 202.5))
{
LCD_DispStr(10, 1, "S ");
}
else if ((angle >= 202.5) && (angle < 247.5))
{
LCD_DispStr(10, 1, "S-W");
}
else if ((angle >= 247.5) && (angle < 292.5))
{
LCD_DispStr(10, 1, "W ");
}
else if ((angle >= 292.5) && (angle < 337.5))
{
LCD_DispStr(10, 1, "N-W");
}
}
void DispAlarm(unsigned char setIndex, bit setAlarmFlag) //显示报警速度
{
if (setAlarmFlag == 1)
{
LCD_WriteCommand(0x0F, 0);
}
else
{
LCD_WriteCommand(0x0C, 0);
LCD_WriteCommand(0x0C, 0);
}
sprintf(dispRow0, "Alarm:%6.2fkm/h", (float)rateAlarm);
sprintf(dispRow1, "Total:%8.2fkm", (float)totalDist / 1000);
LCD_DispStr(0, 0, dispRow0);
LCD_DispStr(0, 1, dispRow1);
switch (setIndex)
{
case 1: LCD_LocateXY(8, 0); break;
case 2: LCD_LocateXY(13, 1); break;
default: ;
}
}
void DispRate() //显示当前速度
{
sprintf(dispRow0, "Rate:%7.2fkm/h", rate);
sprintf(dispRow1, "Dist:%9.2fkm", distance / 1000);
LCD_DispStr(0, 0, dispRow0);
LCD_DispStr(0, 1, dispRow1);
}
void DispTime(unsigned char setIndex, bit setTimeFlag) //显示时间
{
if (setTimeFlag == 1)
{
LCD_WriteCommand(0x0F, 0);
}
else
{
LCD_WriteCommand(0x0C, 0);
LCD_WriteCommand(0x0C, 0);
}
sprintf(dispRow0, "%02d/%02d/%02d ", (int)timeBufDec[1], (int)timeBufDec[2], (int)timeBufDec[3]);
sprintf(dispRow1, " %02d:%02d:%02d ", (int)timeBufDec[4], (int)timeBufDec[5], (int)timeBufDec[6]);
LCD_DispStr(0, 0, dispRow0);
LCD_DispStr(0, 1, dispRow1);
switch (timeBufDec[7])
{
case 0: LCD_DispStr(10, 0, " Sun. "); break;
case 1: LCD_DispStr(10, 0, " Sun. "); break;
case 2: LCD_DispStr(10, 0, " Mon. "); break;
case 3: LCD_DispStr(10, 0, " Tue. "); break;
case 4: LCD_DispStr(10, 0, " Wed. "); break;
case 5: LCD_DispStr(10, 0, "Thur. "); break;
case 6: LCD_DispStr(10, 0, " Fri. "); break;
case 7: LCD_DispStr(10, 0, " Sat. "); break;
default: ;
}
switch (setIndex)
{
case 1: LCD_LocateXY(1 , 0); break;
case 2: LCD_LocateXY(4 , 0); break;
case 3: LCD_LocateXY(7 , 0); break;
case 4: LCD_LocateXY(14, 0); break;
case 5: LCD_LocateXY(5 , 1); break;
case 6: LCD_LocateXY(8 , 1); break;
case 7: LCD_LocateXY(11, 1); break;
default: ;
}
}
void KeyProcess()
{
if (!KEY_SET) //设置键按下
{
DelayMs(10);
if (!KEY_SET)
{
if (dispMode == DISP_TIME_MODE)
{
if (setTimeFlag == 0)
{
setTimeFlag = 1;
setIndex = 1;
DispTime(setIndex, setTimeFlag);
}
}
else if(dispMode == SET_ALARM_MODE)
{
if (setAlarmFlag == 0)
{
setAlarmFlag = 1;
setIndex = 1;
DispAlarm(setIndex, setAlarmFlag);
}
}
else
{
motorFlag = ~motorFlag;
}
}
while (!KEY_SET)
;
}
if (!KEY_UP) //加键按下
{
DelayMs(150);
if (!KEY_UP)
{
if (dispMode == DISP_TIME_MODE)
{
if (setTimeFlag == 1)
{
switch (setIndex)
{
case 1:
{
timeBufDec[1]++;
if (timeBufDec[1] >= 100)
{
timeBufDec[1] = 0;
}
break;
}
case 2:
{
timeBufDec[2]++;
if (timeBufDec[2] >= 13)
{
timeBufDec[2] = 1;
}
break;
}
case 3:
{
timeBufDec[3]++;
if (timeBufDec[3] >= YDay(timeBufDec[1], timeBufDec[2]) + 1)
{
timeBufDec[3] = 1;
}
break;
}
case 4:
{
timeBufDec[7]++;
if (timeBufDec[7] > 7)
{
timeBufDec[7] = 1;
}
break;
}
case 5:
{
timeBufDec[4]++;
if (timeBufDec[4] >= 24)
{
timeBufDec[4] = 0;
}
break;
}
case 6:
{
timeBufDec[5]++;
if (timeBufDec[5] >= 60)
{
timeBufDec[5] = 0;
}
break;
}
case 7:
{
timeBufDec[6]++;
if (timeBufDec[6] >= 60)
{
timeBufDec[6] = 0;
}
break;
}
default:;
}
DispTime(setIndex, setTimeFlag);
}
}
else if (dispMode == SET_ALARM_MODE)
{
if (setAlarmFlag)
{
switch (setIndex)
{
case 1:
if (rateAlarm > 200)
{
rateAlarm = 200;
}
else
{
rateAlarm++;
}
break;
case 2:
totalDist = 0;
break;
}
DispAlarm(setIndex, setAlarmFlag);
}
}
else
{
if (pwmValue <= 11)
{
pwmValue++;
}
}
}
//while (!KEY_UP);
}
if (!KEY_DOWN)//减键按下
{
DelayMs(150);
if (!KEY_DOWN)
{
if (dispMode == DISP_TIME_MODE)
{
if (setTimeFlag == 1)
{
switch (setIndex)
{
case 1:
{
if (timeBufDec[1] == 0)
{
timeBufDec[1] = 100;
}
timeBufDec[1]--;
break;
}
case 2:
{
timeBufDec[2]--;
if (timeBufDec[2] < 1)
{
timeBufDec[2] = 12;
}
break;
}
case 3:
{
timeBufDec[3]--;
if (timeBufDec[3] < 1)
{
timeBufDec[3] = YDay(timeBufDec[1], timeBufDec[2]);
}
break;
}
case 4:
{
timeBufDec[7]--;
if (timeBufDec[7] < 1)
{
timeBufDec[7] = 7;
}
break;
}
case 5:
{
if (timeBufDec[4] == 0)
{
timeBufDec[4] = 24;
}
timeBufDec[4]--;
break;
}
case 6:
{
if (timeBufDec[5] == 0)
{
timeBufDec[5] = 60;
}
timeBufDec[5]--;
break;
}
case 7:
{
if (timeBufDec[6] == 0)
{
timeBufDec[6] = 60;
}
timeBufDec[6]--;
break;
}
default:;
}
DispTime(setIndex, setTimeFlag);
}
}
else if (dispMode == SET_ALARM_MODE)
{
if (setAlarmFlag)
{
switch (setIndex)
{
case 1:
if (rateAlarm <= 0)
{
rateAlarm = 0;
}
else
{
rateAlarm--;
}
break;
case 2:
totalDist = 0;
break;
}
DispAlarm(setIndex, setAlarmFlag);
}
}
else
{
if (pwmValue > 8)
{
pwmValue--;
}
}
}
//while (!KEY_DOWN);
}
仿真演示视频:
https://www.bilibili.com/video/BV13R4y1G7k4/
实物演示视频:
https://www.bilibili.com/video/BV1Q5411Q7HL/


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









