






向量表示法和几何建模:
在分析几何问题时,常采用演绎证明、计算化几何和解析几何的方法的方法。
在数学建模中,常用解析几何的方法进行建模,那么首先我们必须先回顾一下向量的概念。一个向量可以有不止三个轴,可以有30维,300维。普通的画图方法难以表示。但是在代数意义上却可以简单表示:
在代码中也可以轻松表示:
import numpy as np
x = np.array([1, 2, 3, 5, 8])向量提供了将几何概念转化为代数表达式,使得几何问题的解决变得更加简单和直接。
在二维空间中,如果我们要将坐标系绕原点旋转一个角度,就可以通过旋转矩阵来实现。
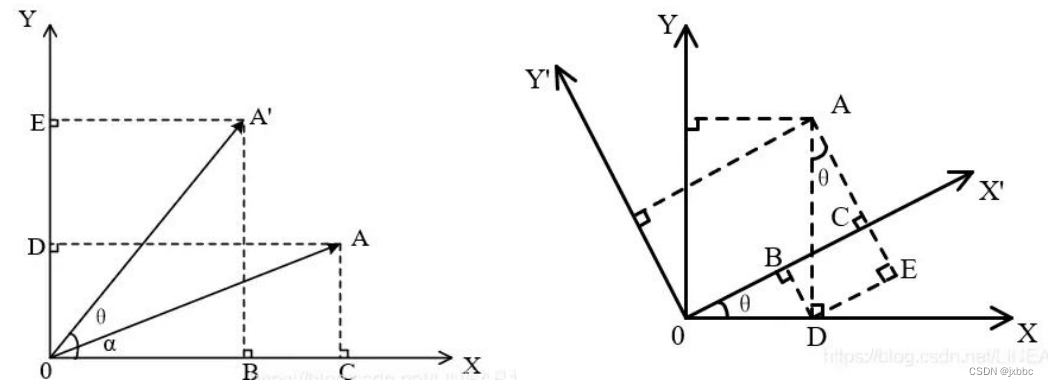
对于逆时针旋转,二维旋转矩阵的形式是:
而在三维空间中,其表达方法则更为复杂,例如:
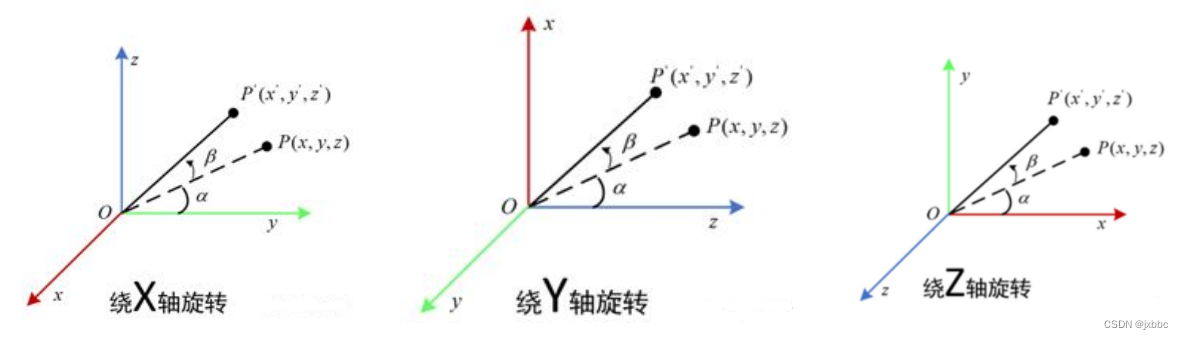
当一个点绕着Z轴进行旋转时,其旋转矩阵可以表示为:
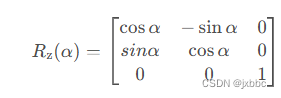
绕其他两轴也类似,在实际应用中,如机器人学和计算机图形学中,便经常会使用到旋转矩阵。
若一个点需要通过不同的轴进行变换,则需要考虑一个旋转顺序的问题,旋转顺序的不同会导致结果存在差异。
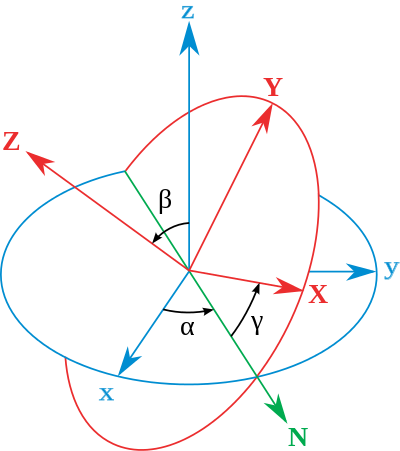
欧拉角是用来确定定点转动刚体位置的三个一组的独立角参量。由章动量θ、旋进角ψ和自转角φ组成,为欧拉首先提出而得名。其是三维空间中用于表示一个物体相对于一个固定坐标系(通常是参考坐标系或世界坐标系)的方向的一组角。常见的旋转顺序有有(x-y-z, y-z-x, z-x-y, x-z-y, z-y-x, y-x-z)六种组合,其中两种比较常用的旋转如下:
- Z-Y-X(Roll-Pitch-Yaw):首先绕zz轴旋转𝛼α(Yaw),然后绕新位置的yy轴旋转𝛽β(Pitch),最后绕新位置的xx轴旋转𝛾γ(Roll)。
- Z-X-Y(Yaw-Pitch-Roll):首先绕zz轴旋转𝛼α(Yaw),然后绕新位置的xx轴旋转𝛽β(Pitch),最后再次绕yy轴旋转𝛾γ(Roll)。
综上,就是几何建模的代数表达过程啦。后续的 平面几何模型介绍和立体几何模型介绍会陆续发出,敬请期待。最后感谢Datawhale给我的这次学习机会,或许会继续努力的。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









