







【无人机控制】基于SQP 求解器、 Runge-Kutta、模型预测控制 (MPC) 实现四旋翼飞行器的全系统动力学设计

文章介绍
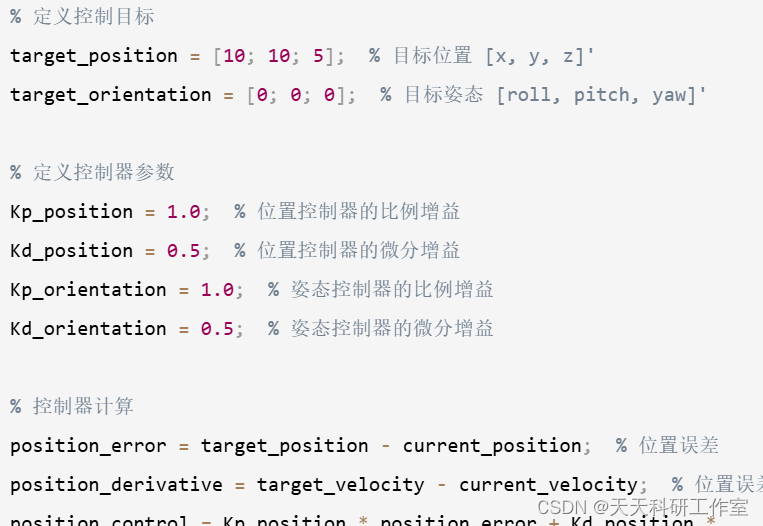
MATLAB基于SQP求解器、Runge-Kutta方法和模型预测控制(MPC)提供了强大的工具和函数库,可以进行四旋翼飞行器的全系统动力学设计和分析。你可以利用这些工具和方法来优化飞行器的控制策略、模拟飞行器的运动行为,并设计高性能的飞行控制器,以满足飞行任务的要求。
下面是对这些概念和方法的简要介绍:
- SQP求解器(Sequential Quadratic
Programming):SQP是一种数学优化算法,用于求解非线性约束最优化问题。在四旋翼飞行器的全系统动力学设计和分析中,可以使用SQP求解器来优化飞行器的控制策略、性能指标或其他约束条件。MATLAB提供了优化工具箱,其中包含了SQP求解器的实现,例如fmincon函数可以用于求解非线性约束优化问题。- Runge-Kutta方法:Runge-Kutta方法是一种常用的数值积分方法,用于求解常微分方程(ODE)。在四旋翼飞行器的全系统动力学设计和分析中,可以使用Runge-Kutta方法来数值求解飞行器的运动方程

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











