









 本文详细介绍了如何在RT-Thread中将LVGL触摸屏驱动与STM32F469的FT6336或FT6206触摸芯片对接并移植,包括Kconfig文件的配置、LVGL输出设备初始化和读取回调函数的实现。
本文详细介绍了如何在RT-Thread中将LVGL触摸屏驱动与STM32F469的FT6336或FT6206触摸芯片对接并移植,包括Kconfig文件的配置、LVGL输出设备初始化和读取回调函数的实现。
RT-Thread 软件包-LVGL用户手册-LVGL触摸屏驱动的对接与移植①
RT-Thread 软件包-LVGL用户手册-LVGL触摸屏驱动的对接与移植①

LVGL触摸屏驱动的对接与移植
1 介绍
本章节介绍如何使用RT-Thread的Touch框架来讲触摸屏驱动对接到LVGL输入设备框架上。
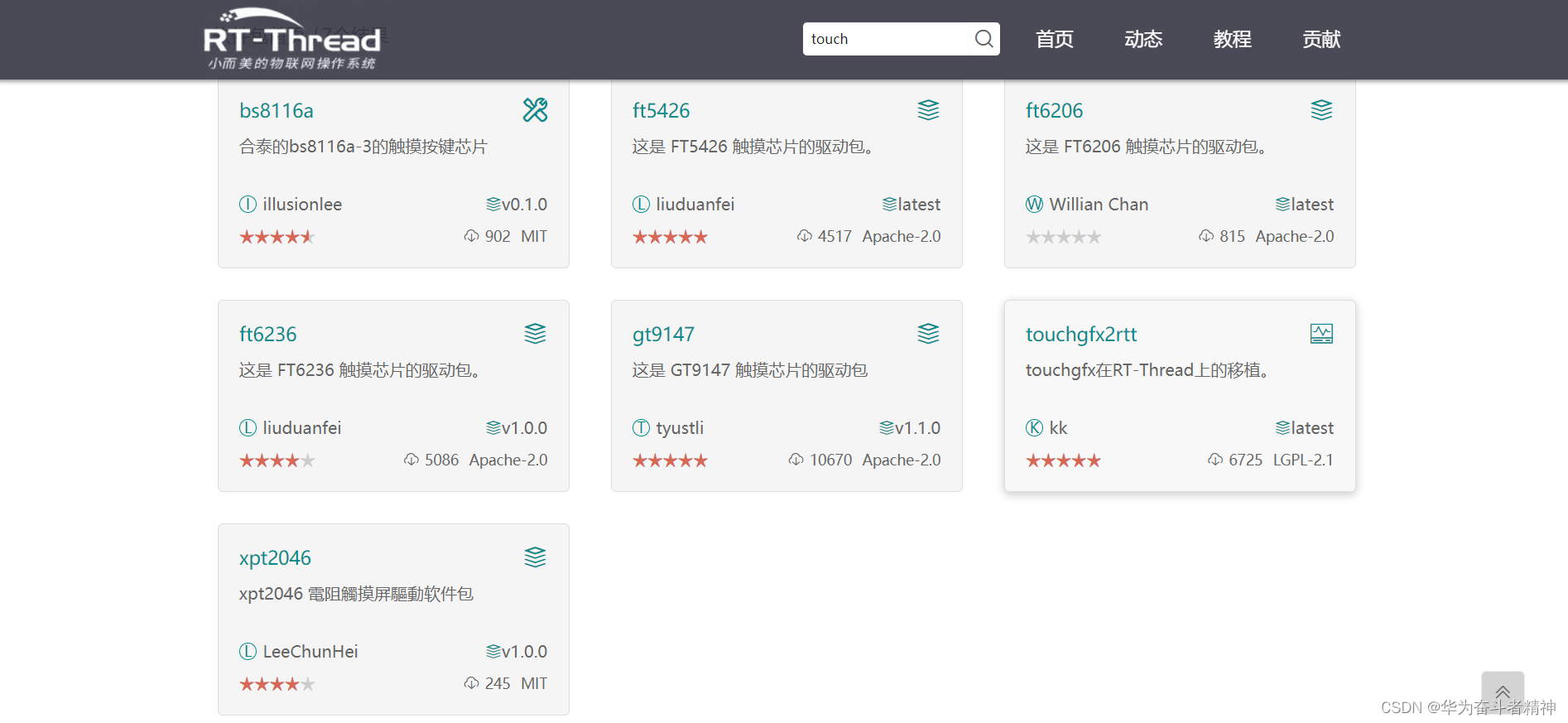
目前RT-Thread的Touch框架以及触摸驱动软件包已经很完善,囊括了多种常用的触摸芯片:
2 前期准备
这里我以 stm32f469-st-disco BSP为例。该开发板不同批次有两种两种触摸芯片,分别是 FT6336 和 FT6206,这里以 FT6336 为例。首先我们应该查询一下芯片的手册:

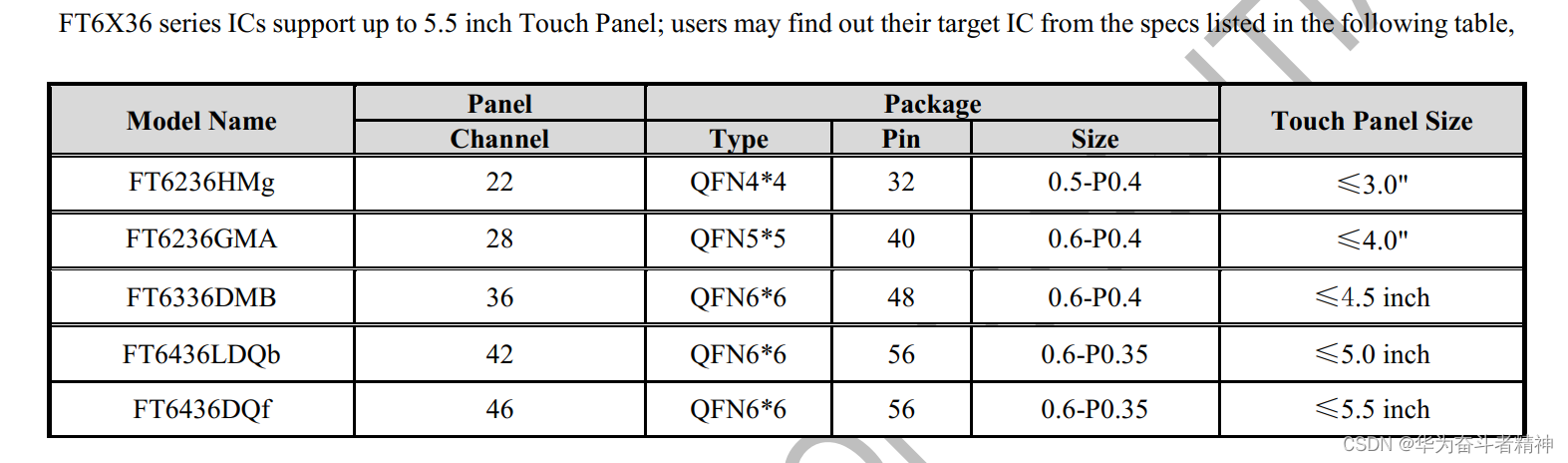
这里为什么要叫大家先看一下数据手册呢,显然,目前软件包还没有支持 FT6336 这个触摸芯片,当我们查找数据手册知道,原来他们属于 FT6x36 系列的触摸芯片。那我们可以知道软件包里面是有 FT6236 这个触摸驱动的。所以,我们可以使用这个触摸驱动来移植。

详细内容参考:软件包介绍
FT6236
简介
ft6236 软件包提供了使用触摸芯片 ft6236 基本功能,并且本软件包已经对接到了 Touch 框架,通过 Touch 框架,开发者可以快速的将此触摸芯片驱动起来。
支持情况
FT6236 触摸芯片 支持情况
I2C 通讯接口 √
中断的工作模式
轮询的工作模式 √
使用说明
软件包依赖
- RT-Thread 4.0.0+
\ | /
- RT - Thread Operating System
/ | \ 4.0.3 build Jul 23 2020
2006 - 2020 Copyright by rt-thread team
msh >
- Touch 组件,在 menuconfig 中开启 Touch 组件的路径如下:
RT-Thread Components --->
Device Drivers --->
[*] Using Touch device drivers
I2C 驱动:ft6236 设备使用 I2C 进行数据通讯,需要系统 I2C 驱动支持,在 menuconfig 中开启 I2C 驱动的路径如下:
Hardware Drivers Config --->
On-chip Peripheral Drivers --->
[*] Enable I2C1 BUS (software simulation) --->
获取软件包
使用 ft6236 软件包需要在 RT-Thread 的包管理中选中它,具体路径如下:
RT-Thread online packages --->
peripheral libraries and drivers --->
touch drivers --->
FT6236 touch driver package.
Version (latest) --->
[ ] Enable 6236 example (NEW)
配置完成后,使用 pkgs --update 更新软件包。
使用软件包
ft6236 软件包初始化函数如下所示:
int rt_hw_ft6236_init(const char *name, struct rt_touch_config *cfg, rt_base_t pin)
该函数需要由用户调用,函数主要完成的功能有:
- 设备配置和初始化(根据传入的配置信息,配置接口设备);
- 注册相应的传感器设备,完成 ft6236 设备的注册;
- 设置复位引脚
初始化示例
#define REST_PIN GET_PIN(D, 3)
int rt_hw_6236_init(void)
{
struct rt_touch_config config;
config.dev_name = "i2c1";
rt_hw_ft6236_init("touch", &config, REST_PIN);
return 0;
}
INIT_ENV_EXPORT(rt_hw_ft6236_init);
注意事项
该软件包目前仅提供一个触点。
在初始化示例中,需要根据自己板子上的实际连接情况,修改 I2C 的设备名。
3 正式移植
3.1 编写Kconfig文件
config BSP_USING_TOUCH_FT6X36
bool "FT6x36"
select BSP_USING_I2C1
select PKG_USING_TOUCH_DRIVERS
select PKG_USING_FT6236
根据原理图选择具体的I2C总线(根据自己BSP的通信方式)
开启软件包的触摸驱动框架
选择一款具体的触摸驱动软件包
config BSP_USING_LVGL
bool "Enable LVGL for LCD"
select BSP_USING_LCD_OTM8009A
select PKG_USING_LVGL
select BSP_USING_TOUCH_FT6X36
default n
在LVGL的配置项添加 select BSP_USING_TOUCH_FT6X36
3.2 修改 lv_port_indev.c 文件
3.2.1 Touch的硬件初始化
static int lv_hw_touch_init(void)
{
struct rt_touch_config cfg;
cfg.dev_name = BSP_TOUCH_I2C_BUS_NAME;/* 使用的I2C设备名 */
#ifdef BSP_USING_TOUCH_FT6X36
rt_hw_ft6236_init(TOUCH_DEV_NAME, &cfg, BSP_TOUCH_I2C_RESET_PIN); /* 软件包提供的初始化函数 */
#endif /* BSP_USING_TOUCH_FT6X36 */
touch_dev = rt_device_find(TOUCH_DEV_NAME);
if (rt_device_open(touch_dev, RT_DEVICE_FLAG_RDONLY) != RT_EOK)
{
LOG_E("Can't open touch device:%s", TOUCH_DEV_NAME);
return -RT_ERROR;
}
return RT_EOK;
}
INIT_COMPONENT_EXPORT(lv_hw_touch_init);
这里就参考软件包的使用方法:
ft-6236-init
3.2.2 LVGL的输出设备初始化
void lv_port_indev_init(void)
{
static lv_indev_drv_t indev_drv;
lv_indev_drv_init(&indev_drv); /*Basic initialization*/
indev_drv.type = LV_INDEV_TYPE_POINTER;
indev_drv.read_cb = input_read;
/*Register the driver in LVGL and save the created input device object*/
touch_indev = lv_indev_drv_register(&indev_drv);
}
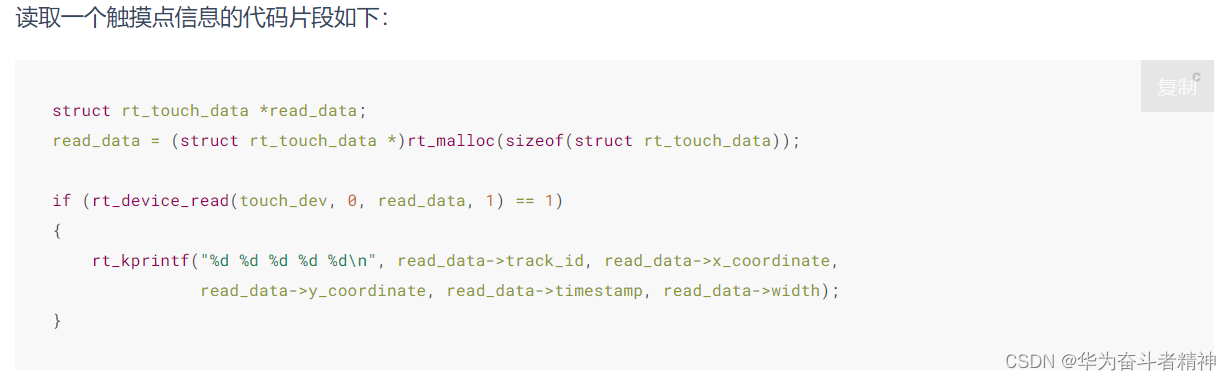
3.2.3 完成LVGL的读取回调函数 input_read
static void input_read(lv_indev_drv_t *indev_drv, lv_indev_data_t *data)
{
struct rt_touch_data *read_data;
/* 可以将内存分配这个步骤改为全局变量,以提高读取效率 */
read_data = (struct rt_touch_data *)rt_calloc(1, sizeof(struct rt_touch_data));
rt_device_read(touch_dev, 0, read_data, 1);
/* 如果没有触摸事件,直接返回 */
if (read_data->event == RT_TOUCH_EVENT_NONE)
return;
/* 这里需要注意的是:触摸驱动的原点可能和LCD的原点不一致,所以需要我们进行一些处理 */
#ifdef BSP_USING_TOUCH_FT6X36
data->point.x = read_data->y_coordinate;
data->point.y = LCD_HEIGHT - read_data->x_coordinate;
#endif /* BSP_USING_TOUCH_FT6X36 */
if (read_data->event == RT_TOUCH_EVENT_DOWN)
data->state = LV_INDEV_STATE_PR;
if (read_data->event == RT_TOUCH_EVENT_MOVE)
data->state = LV_INDEV_STATE_PR;
if (read_data->event == RT_TOUCH_EVENT_UP)
data->state = LV_INDEV_STATE_REL;
}
这个可以参考RT-Thread 文档中心的Touch框架的使用 :



















 1594
1594

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











