







红黑树概念
红黑树是一棵二叉搜索树,它在每个节点上增加了一个存储位来表示节点的颜色,可以是Red或Black。通过对任何一条从根到叶子简单路径上的颜色来约束,红黑树保证最长路径不超过最短路径的两倍,因而近似于平衡。
特性如下:
1. 每个节点,不是红色就是黑色的
2. 根节点是黑色的
3. 如果一个节点是红色的,则它的两个子节点是黑色的
4. 对每个节点,从该节点到其所有后代叶节点的简单路径上,均包含相同数目的黑色节点。
本文主要介绍红黑树的插入。
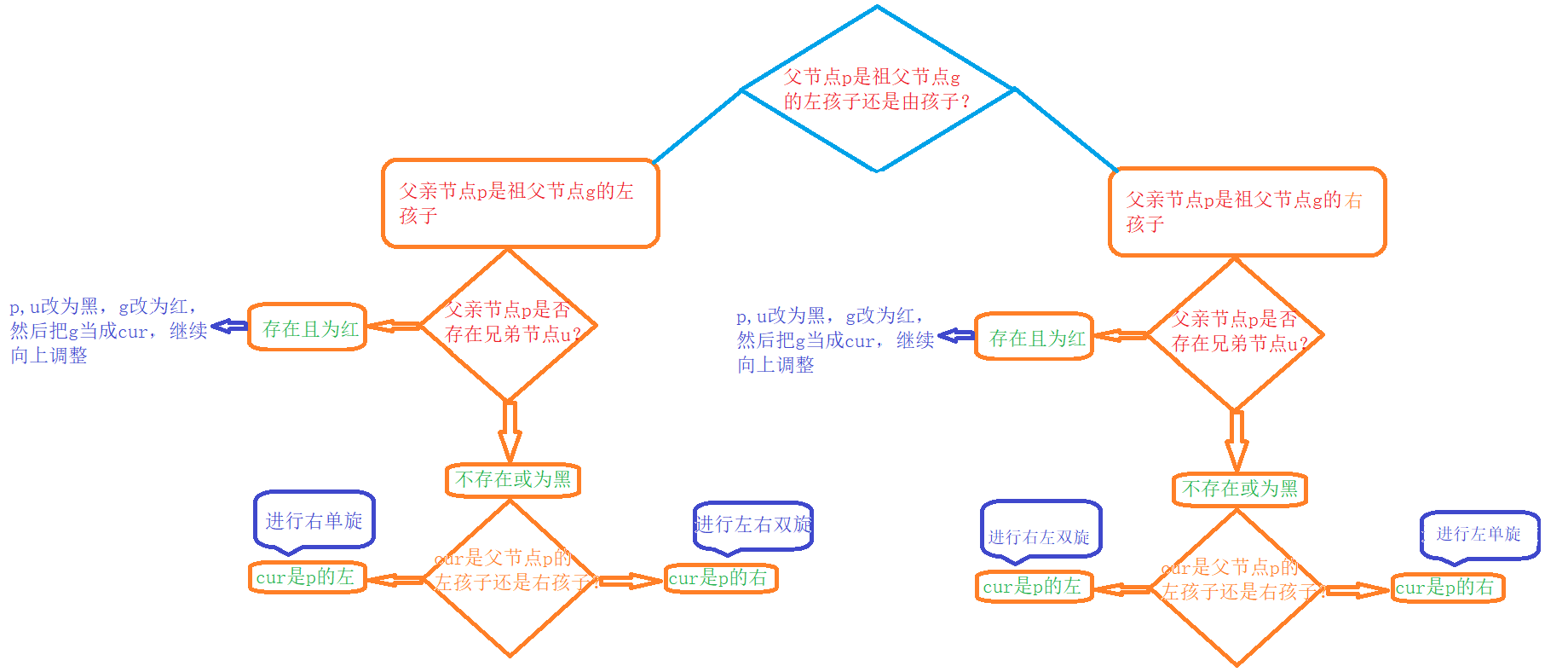
红黑树的插入主要分为两大种情况:cur为当前节点,p为父节点,g为祖父节点,u为叔叔节点
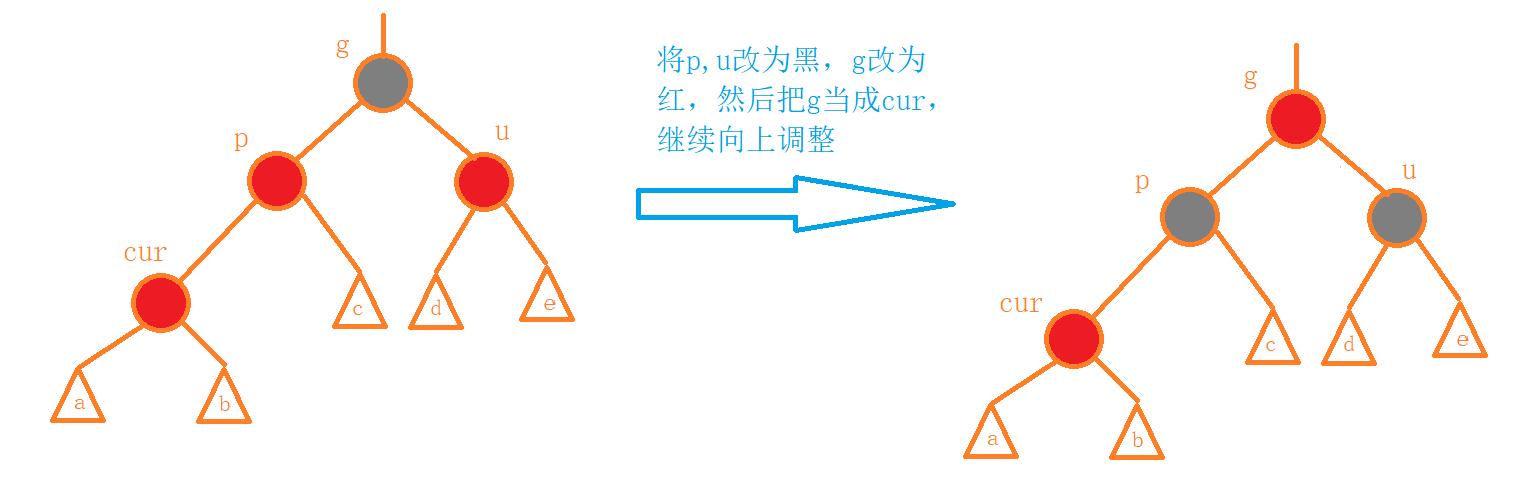
第一种:父亲节点p是祖父节点g的左孩子(分两种情况)
①cur为红,p为红,g为黑,u存在且为红->将p,u改为黑,g改为红,然后把g当成cur,继续向上调整:
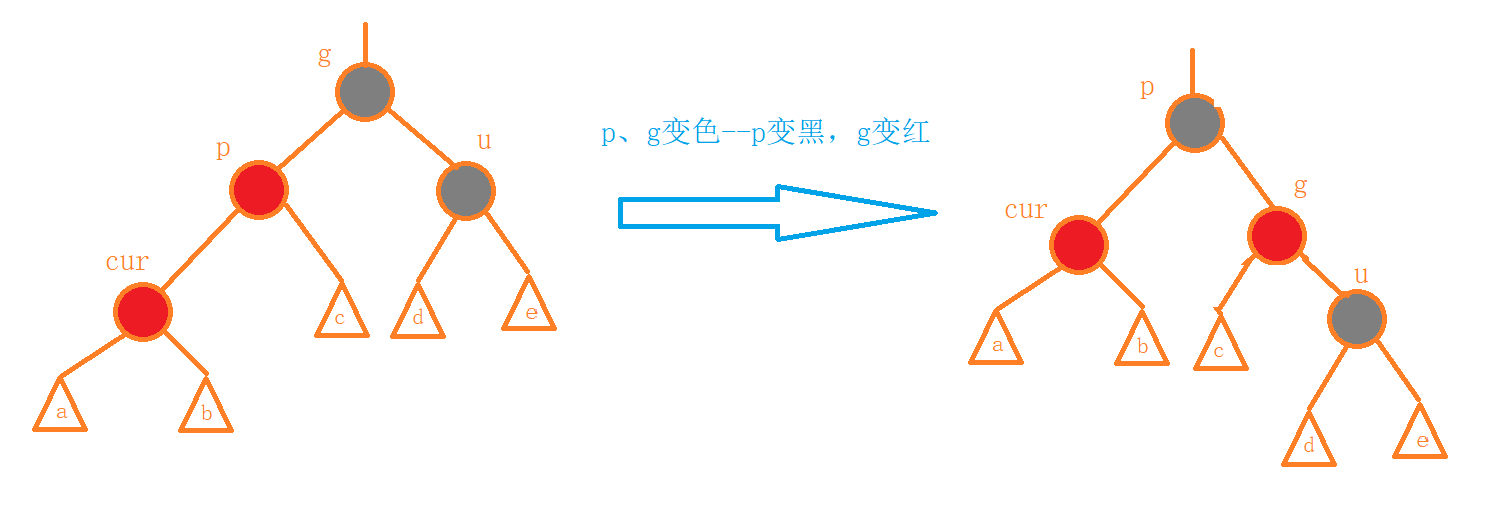
②cur为红,p为红,g为黑,u不存在/u为黑->p、g变色--p变黑,g变红:(分两种情况)
A. cur为p的左孩子,进行右单旋转:
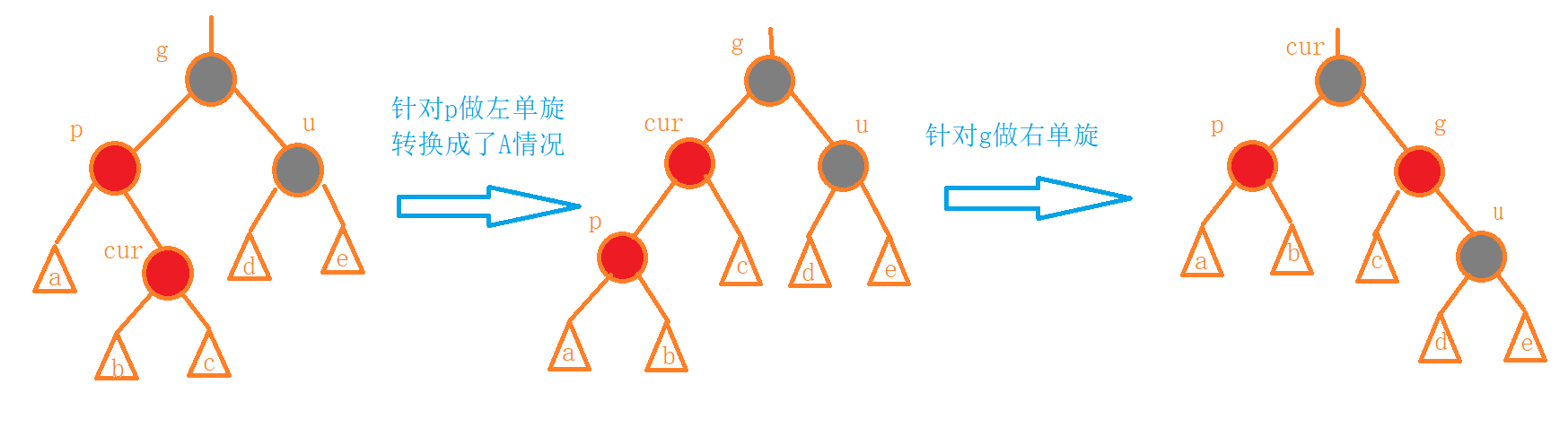
B. cur为p的右孩子,进行左右双旋(其实是先进行左旋转换为A情况,在进行右旋):
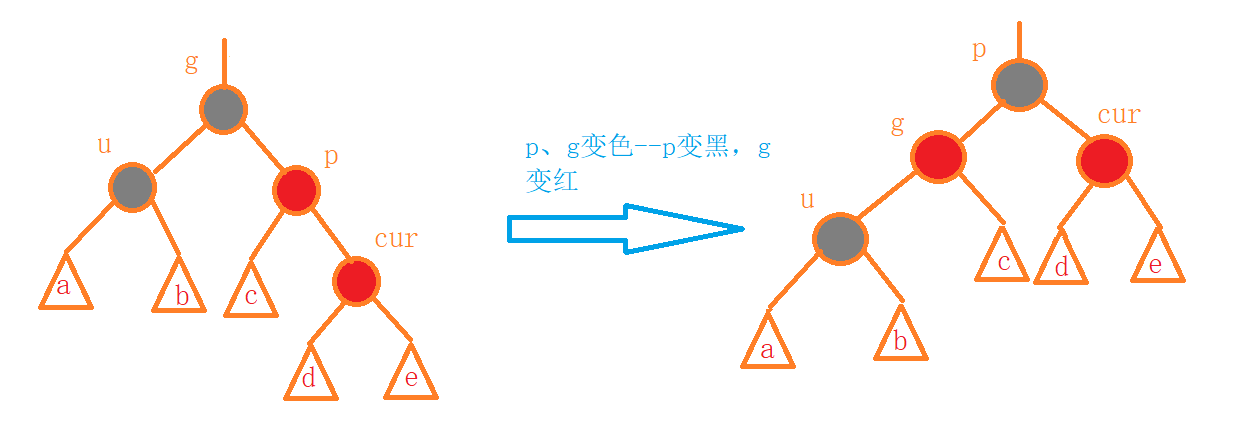
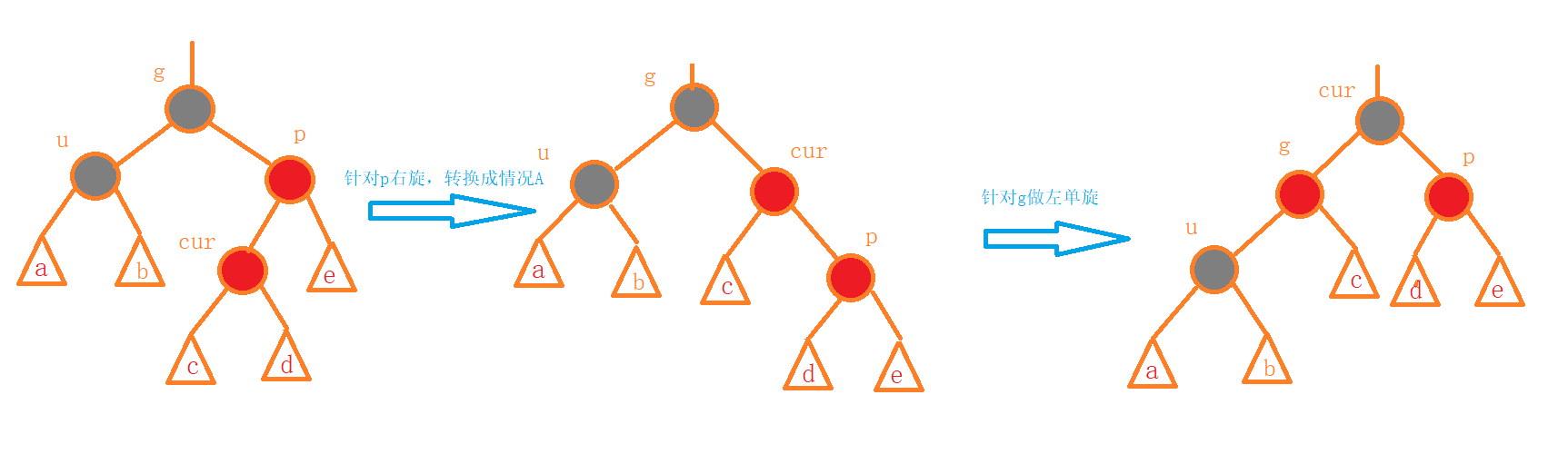
第二种:父亲节点p是祖父节点g的右孩子(分两种情况)
①cur为红,p为红,g为黑,u存在且为红->将p,u改为黑,g改为红,然后把g当成cur,继续向上调整:

②cur为红,p为红,g为黑,u不存在/u为黑->p、g变色--p变黑,g变红:(分两种情况)
A.cur为p的右孩子,进行左单旋转:
B.cur为p的左孩子,进行右左双旋(其实是先进行右旋,转换成A的情况)
最后看一下总体逻辑图:
红黑树的判断:
对于判端一棵树是否是红黑树,其实思路很简单,就是判断红黑树以及它的子树是否满足上述红黑树的特点就好了。
所以,总结下来也就是:
根节点为黑色
没有连续红色节点
每条路径上有相同的黑色节点数
当满足这三个条件的时候,我们就可以认为这棵树是合法的红黑树。
源代码:(没有插入的代码,后面会更新)
#include<iostream>
#include<utility>
using namespace std;
enum Color
{
RED,
BLACK
};
template<class K>
struct RBTreeNode
{
RBTreeNode<K>* _left;
RBTreeNode<K>* _right;
RBTreeNode<K>* _parent;
K _key;
Color _color;
RBTreeNode(const K key)
:_left(NULL)
, _right(NULL)
, _parent(NULL)
, _key(key)
, _color(RED)
{}
};
template<class K>
class RBTree
{
typedef RBTreeNode<K> Node;
public:
RBTree()
: _root(NULL)
{}
bool Insert(const K& key)
{
if (_root == NULL)//如果根节点为空则直接插入
{
_root = new Node(key);
_root->_color = BLACK;
}
Node* cur = _root;
Node* parent = NULL;
//寻找插入位置
while (cur)
{
if (key < cur->_key)//插入节点比当前节点小,向左走
{
parent = cur;
cur = cur->_left;
}
else if (key > cur->_key)//插入节点比当前节点大,向左走
{
parent = cur;
cur = cur->_right;
}
else//插入节点与当前节点相等,说明该树含有该值,直接返回
{
return false;
}
}
//程序走到这里说明找到了需要插入的位置
//需要判断插入左边还是右边
cur = new Node(key);
if (key < parent->_key)//小于父节点,插左边
{
parent->_left = cur;
cur->_parent = parent;
}
else//大于父节点,插右边
{
parent->_right = cur;
cur->_parent = parent;
}
//插完节点后要判断平衡,并进行调整
while (parent && parent->_color == RED)
{
Node* pparent = parent->_parent;//用来记录祖先节点
//parent为祖先节点的左孩子
if (parent == pparent->_left)
{
Node* uncle = pparent->_right;//用来记录叔叔节点
if (uncle && uncle->_color == RED)//叔叔存在且为红
{
parent->_color = uncle->_color = BLACK;//将父节点和叔叔节点置黑
pparent->_color = RED;//祖先节点
cur = pparent;//向上回溯
parent = cur->_parent;
}
else//叔叔不存在或叔叔为黑——又分为两种情况①cur为parent的左,进行右单旋
//②cur为parent的右,进行左右双旋
{
if (cur == parent->_right)//cur为parent的右
{
RotateL(parent);//左旋
swap(parent,cur);
}
RotateR(pparent);//右旋
parent->_color = BLACK;
pparent->_color = RED;
}
}
//parent为祖先节点的右孩子
else
{
Node* uncle = pparent->_right;//记录叔叔节点
if (uncle && uncle->_color == RED)//叔叔存在且为红
{
parent->_color = uncle->_color = BLACK;//将父节点和叔叔节点置黑
pparent->_color = RED;//祖先节点
cur = pparent;//向上回溯
parent = cur->_parent;
}
else//叔叔不存在或叔叔为黑——又分为两种情况①cur为parent的右,进行左单旋
//②cur为parent的左,进行右左双旋
{
if (cur == parent->_left)//cur为左孩子
{
RotateR(parent);
swap(parent, cur);
}
RotateL(pparent);
parent->_color = BLACK;
pparent->_color = RED;
}
}
}
_root->_color = BLACK;//根节点一定要为黑
return true;
}
//右单旋
void RotateR(Node* parent)
{
Node* SubL = parent->_left;
Node* SubLR = SubL->_right;
Node* pparent = parent->_parent;
parent->_left = SubLR;
if (SubLR)//判断SubLR是否存在——这是一个三叉连要保证父子相连
SubLR->_parent = parent;
SubL->_right = parent;
parent->_parent = SubL;
//再判断parent是否为根节点
if (pparent == NULL)//parent是根节点
{
_root = SubL;
}
else//不是根节点
{
//还需判断parent是祖先节点的左孩子还是右孩子
if (parent == pparent->_left)//左孩子
{
pparent->_left = SubL;
}
else//右孩子
{
pparent->_right = SubL;
}
SubL->_parent = pparent;//保证父子相连
}
_root->_parent = NULL;
}
//左单旋
void RotateL(Node* parent)
{
Node* SubR = parent->_right;
Node* SubRL = SubR->_left;
Node* pparent = parent->_parent;
parent->_right = SubRL;
if (SubRL)//判断SubRL是否存在
SubRL->_parent = parent;//保证父子相连
SubR->_left = parent;
parent->_parent = SubR;
//判断parent是否为根节点
if (pparent)//是根节点
{
_root = SubR;
}
else//不是根节点
{
//再判断parent是根节点的左孩子还是右孩子
if (pparent->_left == parent)//左孩子
{
pparent->_left = SubR;
}
else//右孩子
{
pparent->_right = SubR;
}
SubR->_parent = pparent;//保证父子相连
}
_root->_parent= NULL;
}
void Inorder()
{
_Inorder(_root);
cout << endl;
}
void _Inorder(Node* root)
{
if (root == NULL)
return;
if (root)
{
_Inorder(root->_left);
cout << root->_key<<" ";
_Inorder(root->_right);
}
}
bool IsBalance()//判断方法——①每条路径上黑节点的数量相等②不存在连续的红节点③根节点不为红
{
if (_root && _root->_color == Red)//根节点为红
{
return false;
}
int k = 0;//用来记录最左路径上的黑节点
Node* cur = _root;
while (cur)
{
if (cur->_color == BLACK)
++k;
cur = cur->_left;//一直向左走
}
int blacknum = 0;//用来记录其他路径上黑节点的个数和k进行比较
return _IsBalance(_root,k,blacknum);
}
bool _IsBalance(Node* cur,int k,int blacknum)
{
if (cur == NULL)//一条路径
{
if (k != blacknum)//判断两条路径的黑节点是否相等
{
cout << "黑节点个数不同" << endl;
return false;
}
return true;
}
//再判断是否存在连续的红节点
if (cur->_color == RED && cur->_parent->_color == RED)
return false;
if (cur->_color == BLACk)
++blacknum;
return _IsBalance(cur->_left, k, blacknum)
&& _IsBalance(cur->_right,k,blacknum);
}
bool Find(const K& key)
{
Node* cur = _root;
while (cur)
{
if (key < cur->_key)
{
cur = cur->_left;
}
else if (key > cur->_key)
{
cur = cur->_right;
}
else//找到目标值
{
return true;
}
}
return false;
}
private:
Node* _root;
};













 5421
5421











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









