







图的拓扑排序
AOV网
在一个表示工程(例如拍戏、教学安排)的有向图中,用顶点表示活动(每个阶段该做的事情),用弧表示活动之间的优先关系,这样的有向图为顶点表示活动的网叫做AOV网(Activity On vertex NetWord)。AOV网中的弧表示活动之间存在某种制约关系。并且AOV网中不能出现回路。
举个例子:拍戏这个工程,必须先把剧本给定好,然后再开始挑演员,选场地,进行拍摄,一步一步来,不能在拍摄过程中场地还没安排好就开始拍摄,也就是说拍摄的前提必须时场地给选好了。
拓扑序列
设G=(V,E)是一个具有n个顶点的有向图,V中的顶点序列V1,V2,V…满足若从顶点Vi到Vj有一条路径,则在顶点序列中顶点Vi比在顶点Vj之前。则经这样一个序列成为拓扑序列。
例如:
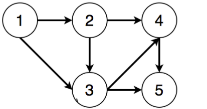
结点1必须在结点2、3之前
结点2必须在结点3、4之前
结点3必须在结点4、5之前
结点4必须在结点5之前
则一个满足条件的拓扑序列为[1, 2, 3, 4, 5]
而这样的序列可能不止一条。
拓扑排序
拓扑排序就是对一个有向图构造拓扑序列的过程。
在任何有向无环图中,拓扑排序满足这样一种条件:对于有向图中任意两个顶点u和v,若存在一条有向边从u指向v,则在拓扑排序中u一定出现在v前面。
拓扑排序的前提
必须是一个有向无环图(directed acyclic graph,DAG)
为什么说必须是有向无环图呢,看如下例子
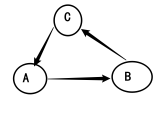
假设想从A开始,而根据拓扑排序原理,C在A的前面,那应该从C开始,而不是A,同样的B又排在C的前面,那也应该是从B开始而不是A或C…这样就分不清到底是从哪个点开始的,也就导致分不清顶点优先级。
两种方式实现拓扑排序
- 邻接表+深度优先搜索(DFS)实现拓扑排序
要想实现深度优先,那么就必定用到递归,而要实现拓扑排序就要进行有向图是否有环的判断,并且要对每个结点进行递归判断其邻接表是否成环。
为什么要对每个结点进行成环的判断呢?如下:
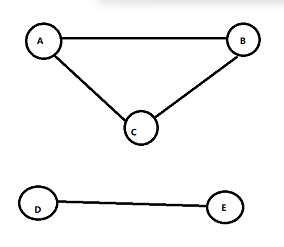
这是一幅不连通的图。如果我们只对一个结点进行判断,例如对D进行判断,那D和E构成的图确实不成环,但实际上整幅图的A、B、C结点却是成环的,这就导致与实际情况不符,所以要对每个结点进行递归判断是否成环。
- 代码实现
//拓扑排序---DFS实现
//返回值是集合
public ArrayList<String> topSortByDFS() {
//定义一个集合类型数组,其下元素均为集合
List[] lists = new List[numOfVertex];
//初始化集合数组中的所有集合
for (int i = 0; i < numOfVertex; i++) {
lists[i] = new ArrayList<Integer>();
}
//获取每个顶点的邻接表,将邻接表存到整数类型的集合中,各顶点的邻接表代表该顶点将来会访问的点
for (int i = 0; i < numOfVertex; i++) {
EdgeNode eNode = headVertex[i].firstEdge;
while (eNode != null) {
lists[i].add(eNode.EdgeData);
eNode = eNode.nextEdge;
}
}
//定义一个栈用来存储被访问了的顶点
Stack<String> stack = new Stack<>();
//用于标记顶点是否被访问过
boolean[] globalMarked = new boolean[numOfVertex];
//用于标记各个顶点对应的邻接表中的所有元素是否被访问过
boolean[] localMarked = new boolean[numOfVertex];
//如果遍历所有顶点后存在环,那么返回空集合
for (int i = 0; i < numOfVertex; i++) {
if(hasCircle(globalMarked,localMarked,lists,i,stack)){
return new ArrayList<>();
}
}
//如果遍历完所有顶点后发现并不存在环,那么将栈中存储的元素弹出并存放到集合中
ArrayList<String> list = new ArrayList<>();
for (int i = 0; i < numOfVertex; i++) {
list.add(stack.pop());
}
return list;
}
//判断是否构成环
private boolean hasCircle(boolean[] globalMarked, boolean[] localMarked, List<Integer>[] lists, int index, Stack<String> stack) {
//如果邻接表中的元素被访问过,那么就存在环
if(localMarked[index]){
return true;
}
//true表示访问过,如果索引为index的点被访问过,则回溯
if(globalMarked[index]){
return false;
}
globalMarked[index] = true;
localMarked[index] = true;
//lists[index]集合中存储的是顶点的邻接表的集合
for(int nextNode : lists[index]){
if(hasCircle(globalMarked,localMarked,lists,nextNode,stack)){
return true;
}
}
//对邻接表中元素判断完后都要重新赋值为false,方便对下一个顶点的邻接表进行判断
localMarked[index] = false;
stack.push(getNameOfVertexByIndex(index));
return false;
}
PS:代码参考
- 邻接表+广度优先搜索(BFS)实现拓扑排序
为了说明如何得到一个有向无环图的拓扑排序,我们首先需要了解有向图结点的入度(indegree)和出度(outdegree)的概念。
假设有向图中不存在环,也就是不存在起点和重点为统一结点的有向边。
入度: 设有向图中有一结点v,其入度即为当前所有从其他结点出发,终点为v的的边的数目。也就是所有指向v的有向边的数目。
出度: 设有向图中有一结点v,其出度即为当前所有起点为v,指向其他结点的边的数目。也就是所有由v发出的边的数目。
- 主要思路
(1)选择一个入度为0的顶点并输出。
(2)从AOV网中删除此入度为0的顶点及其所有出边。
无法遍历完所有的结点,则意味着当前的图不是有向无环图,存在环,也就不存在拓扑排序。
- 代码实现
//拓扑排序
public ArrayList<String> topSortByBFS(){
//该数组存储各个顶点的入度值
int[] inDegree = new int[numOfVertex];
EdgeNode v;
//初始化所有入度值;headVertex是顶点结点
for(VertexNode vertex : headVertex){
v = vertex.firstEdge;
while(v!=null){
inDegree[v.EdgeData]++;
v = v.nextEdge;
}
}
//定义一个队列,存储入度为0的结点数据值
Deque<String> deque = new ArrayDeque<>();
//定义一个集合,存储出栈的值
ArrayList<String> list = new ArrayList<>();
//将所有入度为0的结点入队
for(int i = 0; i<numOfVertex; i++){
if(inDegree[i] == 0){
deque.offer(headVertex[i].vertexData);
}
}
//当队列中存在元素时
while(!deque.isEmpty()){
//让最先入队的出队
String curr = deque.poll();
//出队后的元素用集合接收
list.add(curr);
//根据结点数据域获取入队为0的顶点的下标
int index = getIndexByString(curr);
//利用下标获取对应顶点
VertexNode vertex = headVertex[index];
EdgeNode e = vertex.firstEdge;
//遍历该顶点的邻接表
while(e != null){
int k = e.EdgeData;
//每次父节点弹出队列后,其直接子节点的入度减少
inDegree[k]--;
if(inDegree[k] == 0){
deque.offer(headVertex[k].vertexData);
}
e = e.nextEdge;
}
}
//如果list集合元素个数等于顶点个数,表示拓扑排序完成,没有环存在,反之不等于时表示图中存在环,则返回空集合
return list.size() == numOfVertex ? list : new ArrayList<>();
}














 2451
2451











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









