







 博客介绍了多种树结构。链表不适用于大量输入数据,树采用第一儿子/下一兄弟表示法实现。介绍了二叉树、二叉查找树、AVL树、伸展树、B树的特性、操作及平衡调整方法。还提及B树在磁盘数据存储中的应用,最后说明了树在标准库set和map容器中的应用。
博客介绍了多种树结构。链表不适用于大量输入数据,树采用第一儿子/下一兄弟表示法实现。介绍了二叉树、二叉查找树、AVL树、伸展树、B树的特性、操作及平衡调整方法。还提及B树在磁盘数据存储中的应用,最后说明了树在标准库set和map容器中的应用。
Table of Contents
对于大量的输入数据,链表的线性访问时间太长,不宜使用。
树的实现
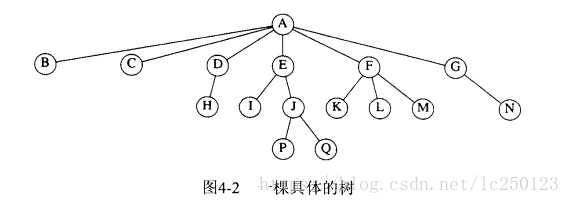
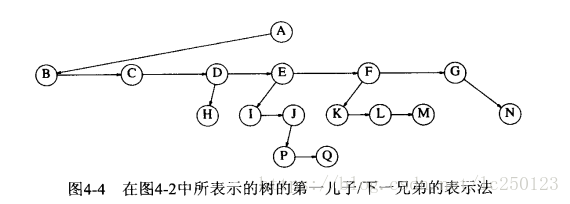
由于树的每个结点的儿子数可能变化很大并且事先不知道,因此在数据结构中建立到各儿子结点的直接链接是不可行的,因为这会产生太多浪费的空间。最好的办法是使用:第一儿子/下一兄弟表示法。
struct TreeNode
{
Object element;
TreeNode *firstChild;
TreeNode *nextSibling;
}结点的所有儿子结点都放在 firstChild 链表中,兄弟结点在 nextSibling 链表中。
二叉树
因为一个二叉树结点最多有两个儿子,所以可以直接链接到它们。实现如下
struct BinaryNode
{
Object element; // The data in the node
BinaryNode *left; // Left child
BinaryNode *right; // Right child
};具有 N 个结点的二叉树,都将需要 N + 1 个 NULL 链。
二叉树分三种遍历:前根、中根、后根遍历。
查找树 ADT -- 二叉查找树
二叉树的一个重要应用是它们在查找中的应用。
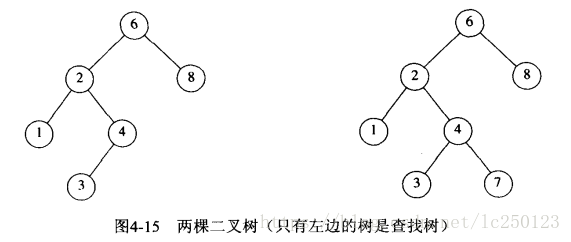
二叉查找树的性质是:对于树中的每个结点 X,它的左子树中所有项的值小于 X 中的项,而它的右子树中所有项的值都大于 X 中的项。
下面的代码中 Comparable 指的是具有比较功能的,查找是基于 “<” 操作符的,所以必须在 Comparable 中进行定义该操作符。
#ifndef BINARYSEARCHTREE_H
#define BINARYSEARCHTREE_H
template <typename Comparable>
class BinarySearchTree
{
public:
BinarySearchTree( ):root(nullptr){}
BinarySearchTree( const BinarySearchTree & rhs );
~BinarySearchTree( )
{ makeEmpty(); }
const Comparable & findMin( ) const
{ return findMin(root)->element; }
const Comparable & findMax( ) const
{ return findMax(root)->element; }
bool contains( const Comparable & x ) const
{ return contains(x, root); }
bool isEmpty( ) const
{
if( root == nullptr )
return true;
else
return false;
}
void printTree( ) const
{ printTree(root); }
void makeEmpty( )
{ makeEmpty(root); }
void insert( const Comparable & x )
{ insert(x, root); }
void remove( const Comparable & x )
{ remove(x, root); }
const BinarySearchTree & operator=( const BinarySearchTree & rhs )
{
if( this != &rhs )
{
makeEmpty();
root = clone(rhs.root);
}
return *this;
}
private:
struct BinaryNode
{
Comparable element;
BinaryNode *left;
BinaryNode *right;
BinaryNode( const Comparable & theElement, BinaryNode *lt, BinaryNode *rt )
: element( theElement ), left( lt ), right( rt ) { }
};
BinaryNode *root; // 根节点
void insert( const Comparable & x, BinaryNode * & t )
{
if( t == nullptr ){
// 如果树中不存在该结点,最终会将树的一个空节点指向这个新节点
t = new BinaryNode(x, nullptr, nullptr);
}else if ( x < t->element ) {
insert( x, t->left );
}else if ( t->element < x) {
insert( x, t->right );
}else {
; // 树中已存在这样的结点,do-nothing
}
}
void remove( const Comparable & x, BinaryNode * & t )
{
if( t == nullptr )
return;
if( x < t->element )
remove(x, t->left);
else if ( t->element < x ) {
remove(x, t->right);
}else if ( t->left != nullptr && t->right != nullptr) {
t->element = findMin(t->right)->element;
remove(t->element, t->right);
}else {
BinaryNode *oldNode = t;
t = (t->left != nullptr) ? t->left : t->right;
delete oldNode;
}
}
BinaryNode * findMin( BinaryNode *t ) const
{
if( t == nullptr )
return nullptr;
if( t->left == nullptr )
return t;
return findMin(t->left);
}
BinaryNode * findMax( BinaryNode *t ) const
{
if( t == nullptr)
return nullptr;
if( t->right == nullptr )
return t;
return findMax(t->right);
}
bool contains( const Comparable & x, BinaryNode *t ) const
{
if( t == nullptr )
return false;
else if (x < t->element) {
return contains(x, t->left);
}else if (t->element < x) {
return contains(x, t->right);
}else {
return true; // 匹配
}
}
void makeEmpty( BinaryNode * & t )
{
if( t != nullptr)
{
makeEmpty(t->left);
makeEmpty(t->right);
delete t;
}
t = nullptr;
}
void printTree( AvlNode *t, void *arg ) const // 后根遍历打印
{
if( t == nullptr )
return;
if( t->left )
printTree(t->left, arg);
if( t->right )
printTree(t->right, arg);
printf((char *)arg, t->element);
}
BinaryNode * clone( BinaryNode *t ) const
{
if( t == nullptr )
return nullptr;
return new BinaryNode(t->element, clone(t->left), clone(t->right));
}
};
#endif // BINARYSEARCHTREE_H
上面是 BinarySearchTree 的实现代码。
一棵树的所有结点的深度和称为 内部路径长(internal path length),记为 D(N)。根结点的深度为 0。
可以推得:D(N) = O(NlogN)。所以任意结点预期的深度为 O(logN)。通常是以 2 为底的 log(N) 稍多一些。
上面的代码中,remove 操作始终使用 右侧子树 中的最小点代替被删除的操作,多次的 insert / remove 操作后二叉树明显的不平衡状态。
AVL 树
AVL 树是带有平衡条件的二叉查找树。一颗 AVL 树是每个结点的左子树和右子树的高度最多差 1 的二叉查找树(空树的高度定义为 -1)。
对 AVL 树,插入和删除操作会引起它的不平衡。
引起不平衡的插入操作有以下四种情景:
- (1)对 A 结点的左儿子的左子树进行一次插入
- (2)对 A 结点的左儿子的右子树进行一次插入
- (3)对 A 结点的右儿子的左子树进行一次插入
- (4)对 A 结点的左儿子的右子树进行一次插入
其中(1)和(4)成镜像对称,调整平衡需要 “单旋转” 操作,(2)和(3)成镜像对称,调整平衡需要 “双旋转” 操作。
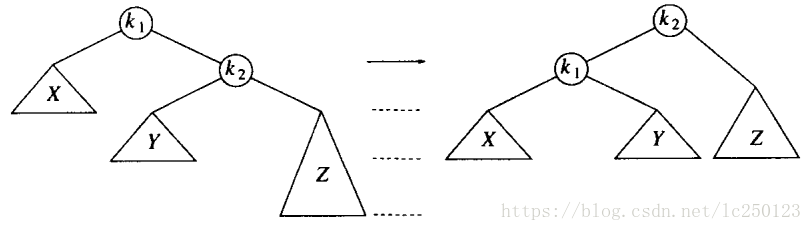
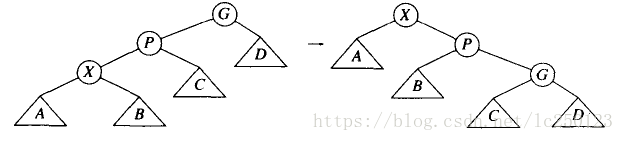
单旋转:
对应情景(1):对 k2 结点的左儿子的左子树进行一次插入
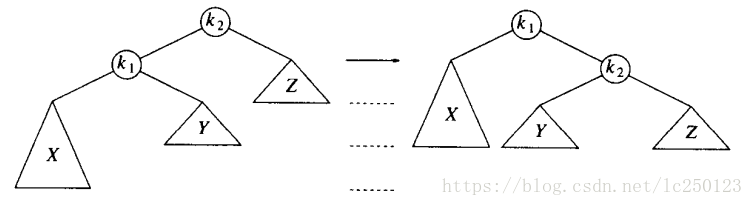
对应情景(4):对 k1 结点的左儿子的右子树进行一次插入
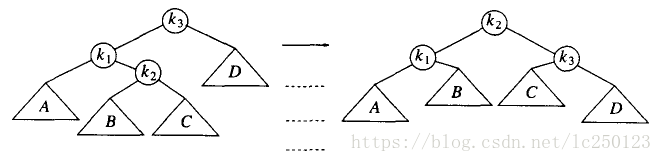
双旋转:
对于如下的情形,单旋转并不能解决:

因为 Y 过深,所以不管怎么单旋转都无法达到平衡。
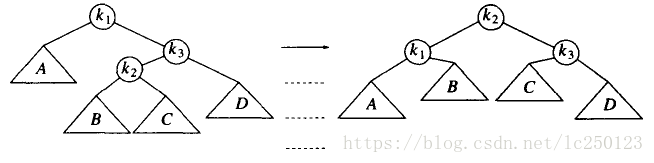
对应情景(2):对 k3 结点的左儿子的右子树进行一次插入
对应情景(3):对 k1 结点的右儿子的左子树进行一次插入
下面的代码中 Comparable 指的是具有比较功能的,查找是基于 “<” 操作符的,所以必须在 Comparable 中进行定义该操作符。
#ifndef AVLTREE_H
#define AVLTREE_H
#define max(a, b) ((a)>(b)?(a):(b))
template <typename Comparable>
class AvlTree
{
public:
AvlTree( ):root(nullptr){}
AvlTree( const AvlTree & rhs );
~AvlTree( )
{ makeEmpty(); }
const Comparable & findMin( ) const
{ return findMin(root)->element; }
const Comparable & findMax( ) const
{ return findMax(root)->element; }
bool contains( const Comparable & x ) const
{ return contains(x, root); }
bool isEmpty( ) const
{
if( root == nullptr )
return true;
else
return false;
}
void printTree( void *arg ) const
{ printTree(root, arg); }
void makeEmpty( )
{ makeEmpty(root); }
void insert( const Comparable & x )
{ insert(x, root); }
void remove( const Comparable & x )
{ remove(x, root); }
const AvlTree & operator=( const AvlTree & rhs )
{
if( this != &rhs )
{
makeEmpty();
root = clone(rhs.root);
}
return *this;
}
private:
struct AvlNode
{
Comparable element;
AvlNode *left;
AvlNode *right;
int height;
AvlNode( const Comparable & theElement, AvlNode *lt, AvlNode *rt, int h = 0 )
: element( theElement ), left( lt ), right( rt ), height( h ) { }
};
AvlNode *root; // 根节点
// 获得结点的高度
int height( AvlNode *t ) const
{
return t == nullptr ? -1 : t->height;
}
/*
* k2 k1
* / \ / \
* k1 A --> k3 k2
* / \ | / \
* k3 B O B A
* |
* O
*/
void rotateWithLeftChild(AvlNode * & k2)
{
AvlNode *k1 = k2->left;
k2->left = k1->right;
k1->right = k2;
k2->height = max(height(k2->left), height(k2->right)) + 1;
k1->height = max(height(k1->left), k2->height) + 1;
//此时该部分的根节点变成 k1,由于是引用,直接赋值就可改变
//原来 k2 的父节点指向孩子的指针为 k1
k2 = k1;
}
/*
* k1 k2
* / \ / \
* A k2 --> k1 K3
* / \ / \ |
* B K3 A B O
* |
* O
*/
void rotateWithRightChild(AvlNode * & k1)
{
AvlNode *k2 = k1->right;
k1->right = k2->left;
k2->left = k1;
k1->height = max(height(k1->left), height(k1->right)) + 1;
k2->height = max(height(k2->right), k1->height) + 1;
k1 = k2;
}
/*
* k3 k3 k3 k2 k2
* / \ / \ / \ / \ / \
* k1 B --> k2 B 或 k2 B --> k1 k3 或 k1 k3
* / \ / \ / / / \ / \ \
* A k2 k1 O k1 A O B A O B
* | / / \
* O A A O
*/
void doubleWithLeftChild(AvlNode * & k3)
{
rotateWithRightChild(k3->left);
rotateWithLeftChild(k3);
}
/*
* k3 k3 k3 k2 k2
* / \ / \ / \ / \ / \
* A k1 --> A k2 或 A k2 --> k3 k1 或 k3 k1
* / \ / \ \ / \ \ / / \
* k2 B O k1 k1 A O B A O B
* | \ / \
* O B O B
*/
void doubleWithRightChild(AvlNode * & k3)
{
rotateWithLeftChild(k3->right);
rotateWithRightChild(k3);
}
void rebalance(AvlNode * & t)
{
if(t){
int diff = height(t->left) - height(t->right);
if(diff == 2)
{
if(height(t->left->left) - height(t->right) == 1)
rotateWithLeftChild(t);
else
doubleWithLeftChild(t);
}
if(diff == -2)
{
if(height(t->right->right) - height(t->left) == 1)
rotateWithRightChild(t);
else
doubleWithRightChild(t);
}
}
}
void insert( const Comparable & x, AvlNode * & t )
{
if( t == nullptr ){
// 如果树中不存在该结点,最终会将树的一个空节点指向这个新节点
t = new AvlNode(x, nullptr, nullptr);
}else if ( x < t->element ) {
insert( x, t->left );
rebalance(t);
}else if ( t->element < x) {
insert( x, t->right );
rebalance(t);
}else {
; // 树中已存在这样的结点,do-nothing
}
t->height = max(height(t->left), height(t->right)) + 1;
}
void remove( const Comparable & x, AvlNode * & t )
{
if( t == nullptr )
return;
if( x < t->element ){
remove(x, t->left);
rebalance(t);
}else if ( t->element < x ) {
remove(x, t->right);
rebalance(t);
}else if ( t->left != nullptr && t->right != nullptr) {
t->element = findMin(t->right)->element;
remove(t->element, t->right);
rebalance(t);
}else {
AvlNode *oldNode = t;
t = (t->left != nullptr) ? t->left : t->right;
delete oldNode;
}
if(t != nullptr)
t->height = max(height(t->left), height(t->right)) + 1;
}
AvlNode * findMin( AvlNode *t ) const
{
if( t == nullptr )
return nullptr;
if( t->left == nullptr )
return t;
return findMin(t->left);
}
AvlNode * findMax( AvlNode *t ) const
{
if( t == nullptr)
return nullptr;
if( t->right == nullptr )
return t;
return findMax(t->right);
}
bool contains( const Comparable & x, AvlNode *t ) const
{
if( t == nullptr )
return false;
else if (x < t->element) {
return contains(x, t->left);
}else if (t->element < x) {
return contains(x, t->right);
}else {
return true; // 匹配
}
}
void makeEmpty( AvlNode * & t )
{
if( t != nullptr)
{
makeEmpty(t->left);
makeEmpty(t->right);
delete t;
}
t = nullptr;
}
void printTree( AvlNode *t, void *arg ) const // 后根遍历打印
{
if( t == nullptr )
return;
if( t->left )
printTree(t->left, arg);
if( t->right )
printTree(t->right, arg);
printf((char *)arg, t->element);
}
AvlNode * clone( AvlNode *t ) const
{
if( t == nullptr )
return nullptr;
return new AvlNode(t->element, clone(t->left), clone(t->right), t->height);
}
};
/*
* 只要你碰到*&,就应该想到**。也就是说这个函数修改或可能修改调用者的指针,
* 而调用者像普通变量一样传递这个指针,不使用地址操作符&。
*/
#endif // AVLTREE_H
测试程序:
int main(int argc, char *argv[])
{
AvlTree<int> avlTree;
avlTree.insert(20);
avlTree.insert(30);
avlTree.insert(10);
avlTree.insert(22);
avlTree.insert(40);
avlTree.insert(50);
avlTree.insert(44);
avlTree.insert(55);
avlTree.insert(12);
avlTree.insert(3);
char buf[5] = " %d ";
avlTree.printTree((void*)buf);
avlTree.remove(10);
avlTree.remove(30);
avlTree.printTree((void*)buf);
return 0;
}输出:3 12 10 22 20 40 55 50 44 30
3 12 22 20 44 55 50 40
伸展树
具有这样特性的树叫伸展树:它保证从空树开始,任意连续 M 次对树的操作最多花费 O(MlogN) 时间。如果任意特定操作可以有最坏时间界 O(N),而我们仍然要求一个 O(logN) 的摊还时间界,那么很清楚,只要有一个结点被访问,它就必须被移动。
因为在许多应用中当一个结点被访问时,它就很可能不久再被访问。而且伸展树还不要求保留高度或平衡信息,因此可以在某种程度上节省空间并简化代码。所以伸展树很有应用场景。
用伸展的方法移动被访问的结点,分以下两种情形:
之字形:
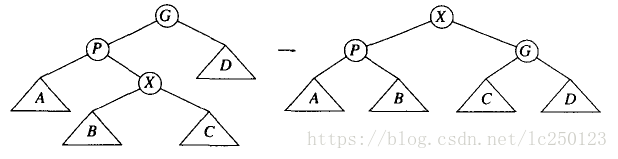
一字形:
对结点 X 的访问会引起右边的结果。
伸展树有几种变体,我们以后讨论。
B 树
考虑这样的情况,有许多数据,内存装不下,那么就意味着必须把数据结构放到磁盘上。而磁盘的的访问时间一般都比较长,拿7200 转/min 的磁盘来说,1 转占用 1/120s,即 8.3ms,平均认为转到一般发现要寻找的信息,即 4.1ms,加上平均寻道时间,一般的访问时间会在 12ms 左右。如果数据存储在硬盘上,以前面的数据结构来说,也就 AVL 树效率最高。拿 1000W 的数据来说,需要的访问次数大约为 log10000000 = 24 次。用时约 12*24 = 288ms,这还是我们对系统拥有完整控制资源的情况下。
如何使访问次数低于 24,很明显我们要构造 M 叉查找树。在二叉树中我们需要一个键来决定到底取用两个分支中的哪个,而在 M 叉查找树中需要 M-1 个键来决定选取哪个分支,同时需要保证 M 叉查找树以某种方式得到平衡。

实现这种想法的一种方法是使用 M 阶 B 树:
(1)数据项存储在树叶上。
(2)非叶结点存储直到 M-1 个键,以指示搜索的方向;键 i 代表子树 i+1 中的最小的键。
(3)树的根要么是一片树叶,要么其儿子数在 2 和 M 之间。
(4)除根外,所有非叶结点的儿子数在 和 M 之间。(保证其不会退化为二叉树)
(5)所有的树叶都在相同的深度上并有 和 L 之间个数项,稍后描述 L。
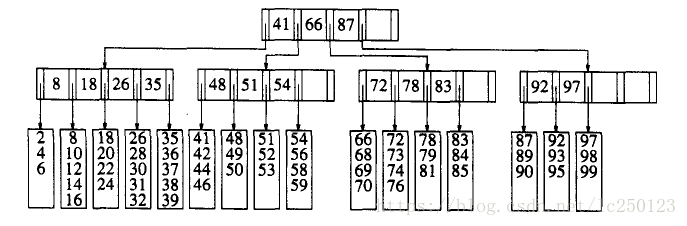
以下是一个 5 阶 B 树的一个例子(L = 5):
如何确定 L 值:
一个结点代表一个磁盘区块,假设一个区块容纳 8192 字节,一个键值假设为 32 字节(比如身份证号占 17 字节),在一个 M 阶的 B 树中,我们有 M-1 个键,总数占 32M-32 字节,然后有 M 个分支,由于每个分支基本上都是别的区块,因此我们可以假设一个分支就像一个指针,占 4 个字节,这样总共 36M-32 字节,那么不超过 8192 的最大 M 值为 228。假设一个数据记录占 256 字节,那么一个区块最多能装 32 个记录,如是 L=32。这样就保证每片树叶有 16 到 32 个数据记录以及每个内部结点(除根外)至少以 114 种方式分叉。如果有 1000W 记录,那么至多存在 1e7 / 16 = 625000 片树叶。在最坏情况下树叶将在第 4 层上(近似 )。同时我们也可以将根节点和下一层存放在内存以提升速率。
对 B 树的插入和删除:
插入时要考虑树叶是否装满,满后分裂为两片树叶,考虑父节点儿子个数是否已满,父节点已满就分裂父节点,同理往上,如果达到根结点满,就分裂根结点,然后添加一个新根。还有一种方法处理儿子过多的情况,就是在相邻结点有空间时把一个儿子过继过去。
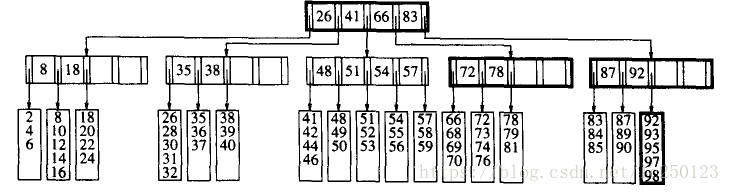
删除时要考虑叶结点小于 的情况,我们可以在没有达到 L 值时合并一个邻项来矫正,如果最终导致根结点只有一个儿子,就删除根节点。如下是删除 99 后的情况:
树在标准库中的应用
下面两个 STL 容器都是由自顶向下红黑树实现的:
set 容器:set 是一个排序后的容器,该容器不允许重复。
map 容器:map 用来存储排序后的由键和值组成的项的集合。键必须唯一,但是多个键可以对应同一个值。因此,值不需要唯一。在 map 中的键保持逻辑排序后的顺序。
map 中需要注意的地方:
map 中有一个重要的操作符重载: ValueType & operator[] ( const KeyType & key ); 其有改变 map 本身的功能,如果 map 中存在这个 key,就返回指向相应的值的引用。如果 map 中不存在 key,就在 map 中插入一个默认的值,然后返回指向这个插入的默认值的引用。所以如果函数中传入的是 const map 就不要使用这个功能。
map<string, double> salaries;
salaries["Pat"] = 7500.00;
cout << salaries["Pat"] << endl;
cout << salaries["Jan"] << endl;
输出:
7500.00
0

















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









