



变量、函数进阶
十三、变量、函数进阶
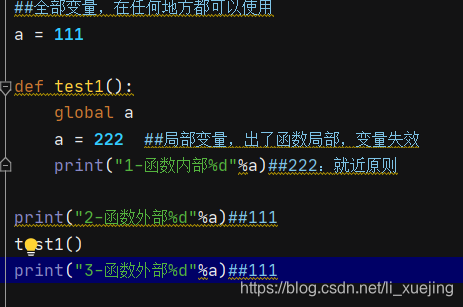
13.1变量的作用域
局部变量:函数内部定义
生命周期:第一次执行(第一次函数调用)出生函数执行完成
全局变量:在函数外定义
在函数内容使用全局变量:global
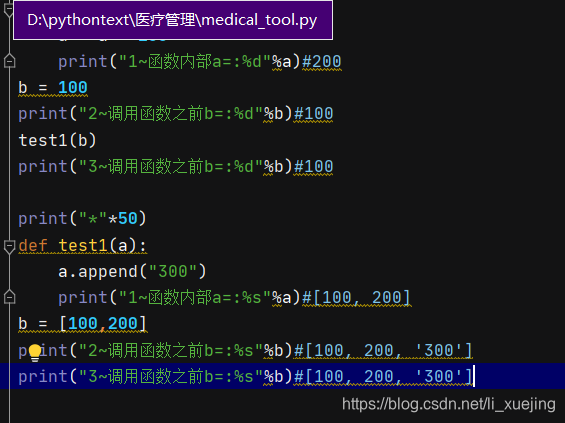
13.2引用问题
基本类型:直接把数值传递给函数,,直接给了100块钱RMB
数值、字符串、浮点、布尔类型
引用类型:传递的是内存空间地址,,给了一张银行卡,里面有100块钱
列表、字典
十四、异常
14.1什么是异常
程序没有像预期一样的执行
计划:今天早睡,明天早起,去食堂吃个美好的早餐;但是第二天食堂不营
业,异常:计划被打乱了,没法好好运行了
14.2语法
n=input(“请输入一个数字:”)
try:
n=int(n)##如果n不是数值,不能跳转
m=100/n#分母不能为0
print(m)
exceptValueError:
print(“ValueError值错误”)
exceptZeroDivisionError:
print(“ZeroDivisionError分母为0”)
exceptExceptionasresut:
print(“未知错误:%s”%resut)
56
else:
print(“尝试成功执行这里,OK”)
finally:#最后、绝
print(“不管异常是否发生,这里一定运行”)

















 1026
1026

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









