







MTK camera flashlight bring up
一、查看硬件原理图:
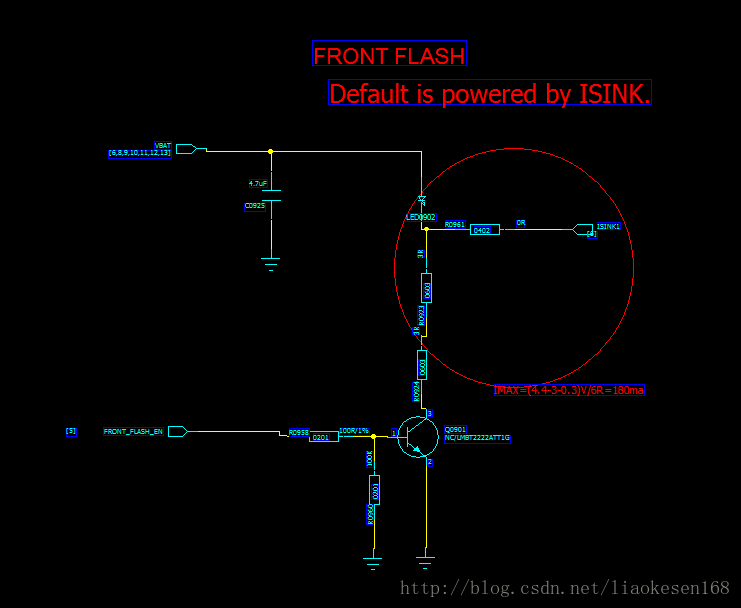
1.front camera:
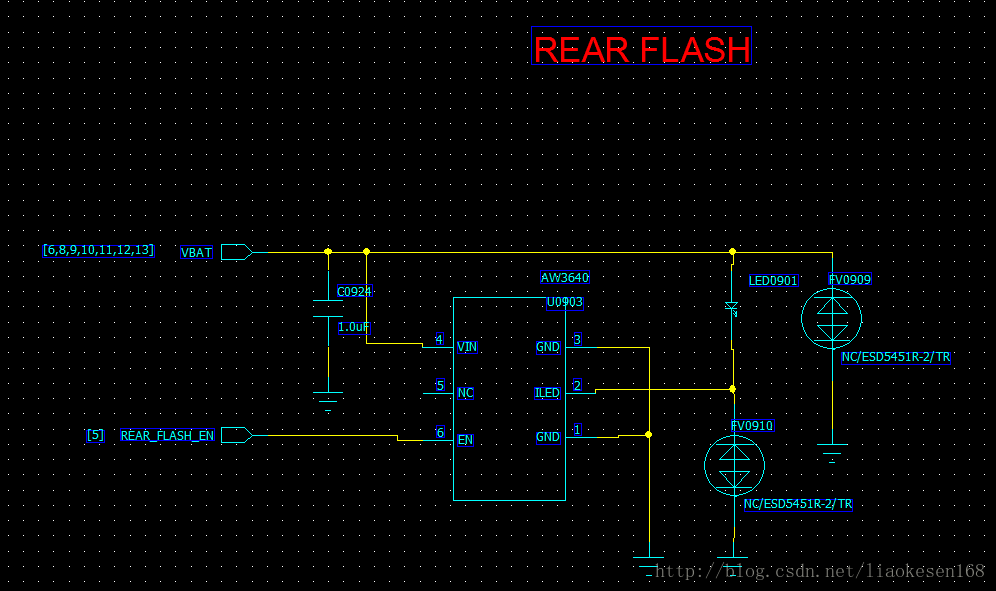
2.rear camera:
3.key note:
(1)注意第一个前摄flashlight:default is powered by ISINK。这里走的是PMIC,没有使用GPIO。
(2)第二个后摄flashlight使用的是GPIO控制。
二、kernel层:
1.front camera 添加驱动文件:
file path:alps/kernel-3.18/drivers/misc/mediatek/flashlight/src/mt6580/sub_strobe.c
example:
/*
* Copyright (C) 2015 MediaTek Inc.
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*/
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/types.h>
#include <linux/wait.h>
#include <linux/slab.h>
#include <linux/fs.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/device.h>
#include <linux/interrupt.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/cdev.h>
#include <linux/errno.h>
#include <linux/time.h>
#include <asm/io.h>
#include <asm/uaccess.h>
#include "kd_camera_typedef.h"
#include <linux/hrtimer.h>
#include <linux/ktime.h>
#include <linux/version.h>
#include <mt-plat/mt_gpio.h>
#ifdef CONFIG_COMPAT
#include <linux/fs.h>
#include <linux/compat.h>
#endif
#include "kd_flashlight.h"
/******************************************************************************
* Debug configuration
******************************************************************************/
/* availible parameter */
/* ANDROID_LOG_ASSERT */
/* ANDROID_LOG_ERROR */
/* ANDROID_LOG_WARNING */
/* ANDROID_LOG_INFO */
/* ANDROID_LOG_DEBUG */
/* ANDROID_LOG_VERBOSE */
#define TAG_NAME "[sub_strobe.c]"
#define PK_DBG_NONE(fmt, arg...) do {} while (0)
#define PK_DBG_FUNC(fmt, arg...) pr_debug(TAG_NAME "%s: " fmt, __func__ , ##arg)
#define PK_WARN(fmt, arg...) pr_warn(TAG_NAME "%s: " fmt, __func__ , ##arg)
#define PK_NOTICE(fmt, arg...) pr_notice(TAG_NAME "%s: " fmt, __func__ , ##arg)
#define PK_INFO(fmt, arg...) pr_info(TAG_NAME "%s: " fmt, __func__ , ##arg)
#define PK_TRC_FUNC(f) pr_debug(TAG_NAME "<%s>\n", __func__)
#define PK_TRC_VERBOSE(fmt, arg...) pr_debug(TAG_NAME fmt, ##arg)
#define PK_ERROR(fmt, arg...) pr_err(TAG_NAME "%s: " fmt, __func__ , ##arg)
#define DEBUG_LEDS_STROBE
#ifdef DEBUG_LEDS_STROBE
#define PK_DBG PK_DBG_FUNC
#define PK_VER PK_TRC_VERBOSE
#define PK_ERR PK_ERROR
#else
#define PK_DBG(a, ...)
#define PK_VER(a, ...)
#define PK_ERR(a, ...)
#endif
#define CONFIG_FLASHLIGHT_EN_BY_ISINK
#if defined (CONFIG_FLASHLIGHT_EN_BY_ISINK)
#include <upmu_common.h>
enum{
C_ISINK_0 = 0, //4mA
C_ISINK_1 = 1, //8mA
C_ISINK_2 = 2, //12mA
C_ISINK_3 = 3, //16mA
C_ISINK_4 = 4, //20mA
C_ISINK_5 = 5 //24mA
};
enum{
C_PMIC_PWM_0 = 0,
C_PMIC_PWM_1 = 1,
C_PMIC_PWM_2 = 2
};
enum{
//32K clock
C_ISINK_1KHZ = 0,
C_ISINK_200HZ = 4,
C_ISINK_5HZ = 199,
C_ISINK_2HZ = 499,
C_ISINK_1HZ = 999,
C_ISINK_05HZ = 1999,
C_ISINK_02HZ = 4999,
C_ISINK_01HZ = 9999,
//2M clock
C_ISINK_2M_20KHZ = 2,
C_ISINK_2M_1KHZ = 61,
C_ISINK_2M_200HZ = 311,
C_ISINK_2M_5HZ = 12499,
C_ISINK_2M_2HZ = 31249,
C_ISINK_2M_1HZ = 62499
};
#define C_NLED_OFF 0
#define C_NLED_ON 1
#endif
static DEFINE_SPINLOCK(g_sub_strobeSMPLock); /* cotta-- SMP proection */
static u32 strobe_Res;
static u32 strobe_Timeus;
static BOOL g_strobe_On;
static int g_duty = -1;
static int g_timeOutTimeMs;
static struct work_struct workTimeOut;
static int FL_Enable(void)
{
#if defined (CONFIG_FLASHLIGHT_EN_BY_ISINK) //internal FL and extennal FL add by zhaoliangming 20160429
pmic_set_register_value(PMIC_ISINK_CH1_EN,C_NLED_ON); // Turn on ISINK Channel 1
pmic_set_register_value(PMIC_ISINK_CH2_EN,C_NLED_ON); // Turn on ISINK Channel 2
pmic_set_register_value(PMIC_ISINK_CH3_EN,C_NLED_ON); // Turn on ISINK Channel 3
#endif
return 0;
}
static int FL_Disable(void)
{
#if defined (CONFIG_FLASHLIGHT_EN_BY_ISINK) //internal FL and external FL add by zhaoliangming 20160429
pmic_set_register_value(PMIC_ISINK_CH1_EN,C_NLED_OFF); // Turn off ISINK Channel 1
pmic_set_register_value(PMIC_ISINK_CH2_EN,C_NLED_OFF); // Turn off ISINK Channel 2
pmic_set_register_value(PMIC_ISINK_CH3_EN,C_NLED_OFF); // Turn off ISINK Channel 3
#endif
return 0;
}
static int FL_dim_duty(kal_uint32 duty)
{
PK_DBG(" FL_dim_duty line=%d\n", __LINE__);
g_duty = duty;
if(duty <32 )
{
pmic_set_register_value(PMIC_ISINK_DIM1_DUTY,duty);
pmic_set_register_value(PMIC_ISINK_DIM2_DUTY,duty);
pmic_set_register_value(PMIC_ISINK_DIM3_DUTY,duty);
}
return 0;
}
static int FL_Init(void)
{
#if defined (CONFIG_FLASHLIGHT_EN_BY_ISINK)
pmic_set_register_value(PMIC_RG_DRV_32K_CK_PDN,0x0); // Disable power down
pmic_set_register_value(PMIC_RG_ISINK1_CK_PDN,0);
pmic_set_register_value(PMIC_RG_ISINK1_CK_SEL,0);
pmic_set_register_value(PMIC_ISINK_CH1_MODE,C_PMIC_PWM_2);//register mode
pmic_set_register_value(PMIC_ISINK_CH1_STEP,C_ISINK_5);//24mA
pmic_set_register_value(PMIC_ISINK_DIM1_DUTY,31);
pmic_set_register_value(PMIC_ISINK_DIM1_FSEL,C_ISINK_1KHZ);//1KHz
pmic_set_register_value(PMIC_RG_ISINK1_DOUBLE_EN,0x1); // Enable double current
pmic_set_register_value(PMIC_RG_DRV_32K_CK_PDN,0x0); // Disable power down
pmic_set_register_value(PMIC_RG_ISINK2_CK_PDN,0);
pmic_set_register_value(PMIC_RG_ISINK2_CK_SEL,0);
pmic_set_register_value(PMIC_ISINK_CH2_MODE,C_PMIC_PWM_2);//register mode
pmic_set_register_value(PMIC_ISINK_CH2_STEP,C_ISINK_5);//24mA
pmic_set_register_value(PMIC_ISINK_DIM2_DUTY,31);
pmic_set_register_value(PMIC_ISINK_DIM2_FSEL,C_ISINK_1KHZ);//1KHz
pmic_set_register_value(PMIC_RG_ISINK2_DOUBLE_EN,0x1); // Enable double current
pmic_set_register_value(PMIC_RG_DRV_32K_CK_PDN,0x0); // Disable power down
pmic_set_register_value(PMIC_RG_ISINK3_CK_PDN,0);
pmic_set_register_value(PMIC_RG_ISINK3_CK_SEL,0);
pmic_set_register_value(PMIC_ISINK_CH3_MODE,C_PMIC_PWM_2);//register mode
pmic_set_register_value(PMIC_ISINK_CH3_STEP,C_ISINK_5);//24mA
pmic_set_register_value(PMIC_ISINK_DIM3_DUTY,31);
pmic_set_register_value(PMIC_ISINK_DIM3_FSEL,C_ISINK_1KHZ);//1KHz
pmic_set_register_value(PMIC_RG_ISINK3_DOUBLE_EN,0x1); // Enable double current
#endif
return 0;
}
static int FL_Uninit(void)
{
return 0;
}
/*****************************************************************************
User interface
*****************************************************************************/
static void work_timeOutFunc(struct work_struct *data)
{
FL_Disable();
PK_DBG("ledTimeOut_callback\n");
}
static enum hrtimer_restart ledTimeOutCallback(struct hrtimer *timer)
{
schedule_work(&workTimeOut);
return HRTIMER_NORESTART;
}
static struct hrtimer g_timeOutTimer;
static void timerInit(void)
{
static int init_flag;
if (init_flag == 0) {
init_flag = 1;
INIT_WORK(&workTimeOut, work_timeOutFunc);
g_timeOutTimeMs = 1000;
hrtimer_init(&g_timeOutTimer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
g_timeOutTimer.function = ledTimeOutCallback;
}
}
static int sub_strobe_ioctl(unsigned int cmd, unsigned long arg)
{
int i4RetValue = 0;
int ior_shift;
int iow_shift;
int iowr_shift;
ior_shift = cmd - (_IOR(FLASHLIGHT_MAGIC, 0, int));
iow_shift = cmd - (_IOW(FLASHLIGHT_MAGIC, 0, int));
iowr_shift = cmd - (_IOWR(FLASHLIGHT_MAGIC, 0, int));
printk(KERN_ERR "koson!!!!! %s:%d cmd=%d arg=%ld\n", __func__, __LINE__, cmd, arg);
/* PK_DBG
("LM3642 constant_flashlight_ioctl() line=%d ior_shift=%d, iow_shift=%d iowr_shift=%d arg=%d\n",
__LINE__, ior_shift, iow_shift, iowr_shift, (int)arg);
*/
switch (cmd) {
case FLASH_IOC_SET_TIME_OUT_TIME_MS:
PK_DBG("FLASH_IOC_SET_TIME_OUT_TIME_MS: %d\n", (int)arg);
g_timeOutTimeMs = arg;
break;
case FLASH_IOC_SET_DUTY:
PK_DBG("FLASHLIGHT_DUTY: %d\n", (int)arg);
FL_dim_duty(arg);
break;
case FLASH_IOC_SET_STEP:
PK_DBG("FLASH_IOC_SET_STEP: %d\n", (int)arg);
break;
case FLASH_IOC_SET_ONOFF:
PK_DBG("FLASHLIGHT_ONOFF: %d\n", (int)arg);
if (arg == 1) {
int s;
int ms;
if (g_timeOutTimeMs > 1000) {
s = g_timeOutTimeMs / 1000;
ms = g_timeOutTimeMs - s * 1000;
} else {
s = 0;
ms = g_timeOutTimeMs;
}
if (g_timeOutTimeMs != 0) {
ktime_t ktime;
ktime = ktime_set(s, ms * 1000000);
hrtimer_start(&g_timeOutTimer, ktime, HRTIMER_MODE_REL);
}
FL_Enable();
} else {
FL_Disable();
hrtimer_cancel(&g_timeOutTimer);
}
break;
default:
PK_DBG(" No such command\n");
i4RetValue = -EPERM;
break;
}
return i4RetValue;
}
static int sub_strobe_open(void *pArg)
{
int i4RetValue = 0;
PK_DBG("constant_flashlight_open line=%d\n", __LINE__);
if (0 == strobe_Res) {
FL_Init();
timerInit();
}
PK_DBG("constant_flashlight_open line=%d\n", __LINE__);
spin_lock_irq(&g_sub_strobeSMPLock);
if (strobe_Res) {
PK_DBG(" busy!\n");
i4RetValue = -EBUSY;
} else {
strobe_Res += 1;
}
spin_unlock_irq(&g_sub_strobeSMPLock);
PK_DBG("constant_flashlight_open line=%d\n", __LINE__);
return i4RetValue;
}
static int sub_strobe_release(void *pArg)
{
PK_DBG(" constant_flashlight_release\n");
if (strobe_Res) {
spin_lock_irq(&g_sub_strobeSMPLock);
strobe_Res = 0;
strobe_Timeus = 0;
/* LED On Status */
g_strobe_On = FALSE;
spin_unlock_irq(&g_sub_strobeSMPLock);
FL_Uninit();
}
PK_DBG(" Done\n");
return 0;
}
FLASHLIGHT_FUNCTION_STRUCT subStrobeFunc = {
sub_strobe_open,
sub_strobe_release,
sub_strobe_ioctl
};
MUINT32 subStrobeInit(PFLASHLIGHT_FUNCTION_STRUCT *pfFunc)
{
if (pfFunc != NULL)
*pfFunc = &subStrobeFunc;
return 0;
}
key note:此处前摄是PMU ISINK控制,虽然原理图上标号为ISINK1,但是它是由ISINK1,2,3组合而成的。
2.rear camera 添加驱动文件:
file path:alps/kernel-3.18/drivers/misc/mediatek/flashlight/src/mt6580/constant_flashlight/leds_strobe.c
example:
/*
* Copyright (C) 2015 MediaTek Inc.
*
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License version 2 as
* published by the Free Software Foundation.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*/
#include <linux/kernel.h>
#include <linux/module.h>
#include <linux/init.h>
#include <linux/types.h>
#include <linux/wait.h>
#include <linux/slab.h>
#include <linux/fs.h>
#include <linux/sched.h>
#include <linux/poll.h>
#include <linux/device.h>
#include <linux/interrupt.h>
#include <linux/delay.h>
#include <linux/platform_device.h>
#include <linux/cdev.h>
#include <linux/errno.h>
#include <linux/time.h>
#include <linux/gpio.h>
#include "kd_flashlight.h"
#include <asm/io.h>
#include <asm/uaccess.h>
#include <mt-plat/mt_gpio.h>
#include "kd_camera_typedef.h"
#include <linux/hrtimer.h>
#include <linux/ktime.h>
#include <linux/version.h>
#include <linux/mutex.h>
#include <linux/i2c.h>
#include <linux/leds.h>
#include <mt-plat/mt_pwm.h>
#include "../../../../imgsensor/src/mt6580/camera_hw/kd_camera_hw.h"
#define GPIO8 8
/******************************************************************************
* Debug configuration
******************************************************************************/
/* availible parameter */
/* ANDROID_LOG_ASSERT */
/* ANDROID_LOG_ERROR */
/* ANDROID_LOG_WARNING */
/* ANDROID_LOG_INFO */
/* ANDROID_LOG_DEBUG */
/* ANDROID_LOG_VERBOSE */
#define TAG_NAME "[leds_strobe.c]"
#define PK_DBG_NONE(fmt, arg...) do {} while (0)
#define PK_DBG_FUNC(fmt, arg...) pr_debug(TAG_NAME "%s: " fmt, __func__ , ##arg)
/*#define DEBUG_LEDS_STROBE*/
#ifdef DEBUG_LEDS_STROBE
#define PK_DBG PK_DBG_FUNC
#else
#define PK_DBG(a, ...)
#endif
/******************************************************************************
* local variables
******************************************************************************/
static DEFINE_SPINLOCK(g_strobeSMPLock); /* cotta-- SMP proection */
static u32 strobe_Res;
static u32 strobe_Timeus;
static BOOL g_strobe_On;
static int g_duty = -1;
static int g_timeOutTimeMs;
static DEFINE_MUTEX(g_strobeSem);
#define STROBE_DEVICE_ID 0xC6
static struct work_struct workTimeOut;
/* #define FLASH_GPIO_ENF GPIO12 */
/* #define FLASH_GPIO_ENT GPIO13 */
//static int g_bLtVersion;
static struct pwm_spec_config pwm_setting;
/*****************************************************************************
Functions
*****************************************************************************/
static void work_timeOutFunc(struct work_struct *data);
int FL_Enable(void)
{
pwm_set_spec_config(&pwm_setting);
return 0;
}
int FL_Disable(void)
{
mt_pwm_disable(PWM1,0);
return 0;
}
int FL_dim_duty(kal_uint32 duty)
{
PK_DBG(" FL_dim_duty line=%d\n", __LINE__);
g_duty = duty;
if(duty == 0)
pwm_setting.PWM_MODE_OLD_REGS.THRESH = 16;
else if (duty == 1)
pwm_setting.PWM_MODE_OLD_REGS.THRESH = 8;
else if (duty > 16)
pwm_setting.PWM_MODE_OLD_REGS.THRESH = 16;
else
pwm_setting.PWM_MODE_OLD_REGS.THRESH = duty;
return 0;
}
int FL_Init(void)
{
mt_set_gpio_mode(GPIO8, GPIO_MODE_02);
pwm_setting.pwm_no = PWM1;
pwm_setting.pmic_pad = 0;
#ifdef PWM_FIFO_1
pwm_setting.mode = PWM_MODE_FIFO;
pwm_setting.clk_div=CLK_DIV1;
pwm_setting.clk_src = PWM_CLK_NEW_MODE_BLOCK_DIV_BY_1625;
pwm_setting.PWM_MODE_FIFO_REGS.IDLE_VALUE = 0;
pwm_setting.PWM_MODE_FIFO_REGS.GUARD_VALUE = 0;
pwm_setting.PWM_MODE_FIFO_REGS.STOP_BITPOS_VALUE = 31;
pwm_setting.PWM_MODE_FIFO_REGS.HDURATION = 4;
pwm_setting.PWM_MODE_FIFO_REGS.LDURATION = 4;
pwm_setting.PWM_MODE_FIFO_REGS.GDURATION =
(pwm_setting.PWM_MODE_FIFO_REGS.HDURATION + 1) * 32 - 1;
pwm_setting.PWM_MODE_FIFO_REGS.GUARD_VALUE = 1;
pwm_setting.PWM_MODE_FIFO_REGS.SEND_DATA0 =50;
pwm_setting.PWM_MODE_FIFO_REGS.WAVE_NUM = 0;
#else
pwm_setting.mode = PWM_MODE_OLD;
pwm_setting.clk_div=CLK_DIV1;
pwm_setting.clk_src = PWM_CLK_OLD_MODE_BLOCK;
pwm_setting.PWM_MODE_OLD_REGS.IDLE_VALUE = 0;
pwm_setting.PWM_MODE_OLD_REGS.GUARD_VALUE = 0;
pwm_setting.PWM_MODE_OLD_REGS.GDURATION = 0;
pwm_setting.PWM_MODE_OLD_REGS.WAVE_NUM = 0;
pwm_setting.PWM_MODE_OLD_REGS.DATA_WIDTH = 16;
pwm_setting.PWM_MODE_OLD_REGS.THRESH = 8;
#endif
/* PK_DBG(" FL_Init line=%d\n", __LINE__); */
return 0;
}
int FL_Uninit(void)
{
FL_Disable();
return 0;
}
/*****************************************************************************
User interface
*****************************************************************************/
static void work_timeOutFunc(struct work_struct *data)
{
FL_Disable();
PK_DBG("ledTimeOut_callback\n");
}
enum hrtimer_restart ledTimeOutCallback(struct hrtimer *timer)
{
schedule_work(&workTimeOut);
return HRTIMER_NORESTART;
}
static struct hrtimer g_timeOutTimer;
void timerInit(void)
{
static int init_flag;
if (init_flag == 0) {
init_flag = 1;
INIT_WORK(&workTimeOut, work_timeOutFunc);
g_timeOutTimeMs = 1000;
hrtimer_init(&g_timeOutTimer, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
g_timeOutTimer.function = ledTimeOutCallback;
}
}
static int constant_flashlight_ioctl(unsigned int cmd, unsigned long arg)
{
int i4RetValue = 0;
int ior_shift;
int iow_shift;
int iowr_shift;
ior_shift = cmd - (_IOR(FLASHLIGHT_MAGIC, 0, int));
iow_shift = cmd - (_IOW(FLASHLIGHT_MAGIC, 0, int));
iowr_shift = cmd - (_IOWR(FLASHLIGHT_MAGIC, 0, int));
switch (cmd) {
case FLASH_IOC_SET_TIME_OUT_TIME_MS:
PK_DBG("FLASH_IOC_SET_TIME_OUT_TIME_MS: %d\n", (int)arg);
g_timeOutTimeMs = arg;
break;
case FLASH_IOC_SET_DUTY:
PK_DBG("FLASHLIGHT_DUTY: %d\n", (int)arg);
FL_dim_duty(arg);
break;
case FLASH_IOC_SET_STEP:
PK_DBG("FLASH_IOC_SET_STEP: %d\n", (int)arg);
break;
case FLASH_IOC_SET_ONOFF:
PK_DBG("FLASHLIGHT_ONOFF: %d\n", (int)arg);
if (arg == 1) {
int s;
int ms;
if (g_timeOutTimeMs > 1000) {
s = g_timeOutTimeMs / 1000;
ms = g_timeOutTimeMs - s * 1000;
} else {
s = 0;
ms = g_timeOutTimeMs;
}
if (g_timeOutTimeMs != 0) {
ktime_t ktime;
ktime = ktime_set(s, ms * 1000000);
hrtimer_start(&g_timeOutTimer, ktime, HRTIMER_MODE_REL);
}
FL_Enable();
} else {
FL_Disable();
hrtimer_cancel(&g_timeOutTimer);
}
break;
default:
PK_DBG(" No such command\n");
i4RetValue = -EPERM;
break;
}
return i4RetValue;
}
static int constant_flashlight_open(void *pArg)
{
int i4RetValue = 0;
PK_DBG("constant_flashlight_open line=%d\n", __LINE__);
if (0 == strobe_Res) {
FL_Init();
timerInit();
}
PK_DBG("constant_flashlight_open line=%d\n", __LINE__);
spin_lock_irq(&g_strobeSMPLock);
if (strobe_Res) {
PK_DBG(" busy!\n");
i4RetValue = -EBUSY;
} else {
strobe_Res += 1;
}
spin_unlock_irq(&g_strobeSMPLock);
PK_DBG("constant_flashlight_open line=%d\n", __LINE__);
return i4RetValue;
}
static int constant_flashlight_release(void *pArg)
{
PK_DBG(" constant_flashlight_release\n");
if (strobe_Res) {
spin_lock_irq(&g_strobeSMPLock);
strobe_Res = 0;
strobe_Timeus = 0;
/* LED On Status */
g_strobe_On = FALSE;
spin_unlock_irq(&g_strobeSMPLock);
FL_Uninit();
}
PK_DBG(" Done\n");
return 0;
}
FLASHLIGHT_FUNCTION_STRUCT constantFlashlightFunc = {
constant_flashlight_open,
constant_flashlight_release,
constant_flashlight_ioctl
};
MUINT32 constantFlashlightInit(PFLASHLIGHT_FUNCTION_STRUCT *pfFunc)
{
if (pfFunc != NULL)
*pfFunc = &constantFlashlightFunc;
return 0;
}
/* LED flash control for high current capture mode*/
ssize_t strobe_VDIrq(void)
{
return 0;
}
EXPORT_SYMBOL(strobe_VDIrq);
二、hal层:
1.front camera 打开flashlight宏控制:
file path:alps/vendor/mediatek/proprietary/custom/mt6580/hal/flashlight/flash_tuning_custom2.h
example:
#define SUB_FLASH_SUPPORT 1















 661
661

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









