转载:http://blog.csdn.net/zqixiao_09/article/details/50888795
下面将通过一个实例来深入学习Linux platform设备驱动开发流程。
一、platform 驱动的工作过程
platform模型驱动编程,需要实现platform_device(设备)与platform_driver(驱动)在platform(虚拟总线)上的注册、匹配,相互绑定,然后再做为一个普通的字符设备进行相应的应用,总之如果编写的是基于字符设备的platform驱动,在遵循并实现platform总线上驱动与设备的特定接口的情况下,最核心的还是字符设备的核心结构:cdev、 file_operations(他包含的操作函数接口)、dev_t(设备号)、设备文件(/dev)等,因为用platform机制编写的字符驱动,它的本质是字符驱动。platform_driver 只是负责驱动与总线的匹配。platform 驱动只是在字符设备驱动外套一层platform_driver 的外壳。
在一般情况下,2.6内核中已经初始化并挂载了一条platform总线在sysfs文件系统中。那么我们编写platform模型驱动时,需要完成两个工作:
a -- 实现platform驱动
b -- 实现platform设备
然而在实现这两个工作的过程中还需要实现其他的很多小工作,在后面介绍。platform模型驱动的实现过程核心架构就很简单,如下所示:
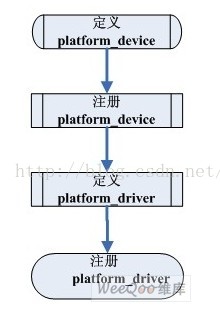
platform驱动模型三个对象:platform总线、platform设备、platform驱动。
platform总线对应的内核结构:struct bus_type-->它包含的最关键的函数:match() (要注意的是,这块由内核完成,我们不参与)
platform设备对应的内核结构:struct platform_device-->注册:platform_device_register(unregister)
platform驱动对应的内核结构:struct platform_driver-->注册:platform_driver_register(unregister)
那具体platform驱动的工作过程是什么呢:
设备(或驱动)注册的时候,都会引发总线调用自己的match函数来寻找目前platform总线是否挂载有与该设备(或驱动)名字匹配的驱动(或设备),如果存在则将双方绑定;
如果先注册设备,驱动还没有注册,那么设备在被注册到总线上时,将不会匹配到与自己同名的驱动,然后在驱动注册到总线上时,因为设备已注册,那么总线会立即匹配与绑定这时的同名的设备与驱动,再调用驱动中的probe函数等;
如果是驱动先注册,同设备驱动一样先会匹配失败,匹配失败将导致它的probe函数暂不调用,而是要等到设备注册成功并与自己匹配绑定后才会调用。
二、实现platform 驱动与设备的详细过程
1、思考问题?
在分析platform 之前,可以先思考一下下面的问题:
a -- 为什么要用 platform 驱动?不用platform驱动可以吗?
b -- 设备驱动中引入platform 概念有什么好处?
现在先不回答,看完下面的分析就明白了,后面会附上总结。
2、platform_device 结构体 VS platform_driver 结构体
这两个结构体分别描述了设备和驱动,二者有什么关系呢?先看一下具体结构体对比
|
设备(硬件部分):中断号,寄存器,DMA等
platform_device 结构体
|
驱动(软件部分)
platform_driver 结构体
|
|
struct platform_device {
const char *name; 名字
int id;
bool id_auto;
struct device
dev; 硬件模块必须包含该结构体
u32
num_resources; 资源个数
struct resource *resource;
资源 人脉
const struct platform_device_id *
id_entry;
/* arch specific additions */
struct pdev_archdata archdata;
};
|
struct platform_driver {
int (*
probe
)(struct platform_device *);
硬件和软件匹配成功之后调用该函数
int (*
remove)(struct platform_device *);
硬件卸载了调用该函数
void (*shutdown)(struct platform_device *);
int (*suspend)(struct platform_device *, pm_message_t state);
int (*resume)(struct platform_device *);
struct device_driver
driver;内核里所有的驱动程序必须包含该结构体
const struct platform_device_id *
id_table; 八字
};
|
|
设备实例:
static struct platform_device hello_device=
{
.name = "bigbang",
.id = -1,
.dev.release = hello_release,
};
|
驱动实例:
static struct platform_driver hello_driver=
{
.driver.name = "bigbang",
.probe = hello_probe,
.remove = hello_remove,
};
|
前面提到,实现platform模型的过程就是总线对设备和驱动的匹配过程 。打个比方,就好比相亲,总线是红娘,设备是男方,驱动是女方:
a -- 红娘(总线)负责男方(设备)和女方(驱动)的撮合;
b -- 男方(女方)找到红娘,说我来登记一下,看有没有合适的姑娘(汉子)—— 设备或驱动的注册;
c -- 红娘这时候就需要看看有没有八字(二者的name 字段)匹配的姑娘(汉子)——match 函数进行匹配,看name是否相同;
d -- 如果八字不合,就告诉男方(女方)没有合适的对象,先等着,别急着乱做事 —— 设备和驱动会等待,直到匹配成功;
e -- 终于遇到八字匹配的了,那就结婚呗!接完婚,男方就向女方交代,我有多少存款,我的房子在哪,钱放在哪等等( struct resource *resource),女方说好啊,于是去房子里拿钱,去给男方买菜啦,给自己买衣服、化妆品、首饰啊等等(int (*probe)(struct platform_device *) 匹配成功后驱动执行的第一个函数),当然如果男的跟小三跑了(设备卸载),女方也不会继续待下去的( int (*remove)(struct platform_device *))。
3、设备资源结构体
在struct platform_device 结构体中有一重要成员 struct resource *resource
- struct resource {
- resource_size_t start; 资源起始地址
- resource_size_t end; 资源结束地址
- const char *name;
- unsigned long flags; 区分是资源什么类型的
- struct resource *parent, *sibling, *child;
- };
-
- #define IORESOURCE_MEM 0x00000200
- #define IORESOURCE_IRQ 0x00000400
flags 指资源类型,我们常用的是 IORESOURCE_MEM、IORESOURCE_IRQ 这两种。start 和 end 的含义会随着 flags而变更,如
a -- flags为IORESOURCE_MEM 时,start 、end 分别表示该platform_device占据的内存的开始地址和结束值;
b -- flags为 IORESOURCE_IRQ 时,start 、end 分别表示该platform_device使用的中断号的开始地址和结束值;
下面看一个实例:
- static struct resource beep_resource[] =
- {
- [0] = {
- .start = 0x114000a0,
- .end = 0x114000a0+0x4,
- .flags = IORESOURCE_MEM,
- },
-
- [1] = {
- .start = 0x139D0000,
- .end = 0x139D0000+0x14,
- .flags = IORESOURCE_MEM,
- },
- };
4、将字符设备添加到 platform的driver中
前面我们提到platform 驱动只是在字符设备驱动外套一层platform_driver 的外壳,下面我们看一下添加的过程:
- static struct file_operations hello_ops=
- {
- .open = hello_open,
- .release = hello_release,
- .unlocked_ioctl = hello_ioctl,
- };
-
- static int hello_remove(struct platform_device *pdev)
- {
- 注销分配的各种资源
- }
-
- static int hello_probe(struct platform_device *pdev)
- {
- 1.申请设备号
- 2.cdev初始化注册,&hello_ops
- 3.从pdev读出硬件资源
- 4.对硬件资源初始化,ioremap,request_irq( )
- }
-
- static int hello_init(void)
- {
- 只注册 platform_driver
- }
-
- static void hello_exit(void)
- {
- 只注销 platform_driver
- }
可以看到,模块加载和卸载函数仅仅通过paltform_driver_register()、paltform_driver_unregister() 函数进行 platform_driver 的注册和注销,而原先注册和注销字符设备的工作已经被移交到 platform_driver 的 probe() 和 remove() 成员函数中。
5、platform是如何匹配device和driver
这时就该总线出场了,系统为platform总线定义了一个bus_type 的实例platform_bus_type,其定义如下:
- struct bus_type platform_bus_type = {
- .name = "platform",
- .dev_groups = platform_dev_groups,
- .match = platform_match,
- .uevent = platform_uevent,
- .pm = &platform_dev_pm_ops,
- };
其又是怎样工作的呢?在platform.c (e:\linux-3.14-fs4412\drivers\base) 31577 2014/3/31 中可以看到
- __platform_driver_register()
- {
- drv->driver.bus = &platform_bus_type; 536行
- }
在 platform_bus_type 中调用 了platform_match:
- static int platform_match(struct device *dev, struct device_driver *drv)
- {
- struct platform_device *pdev = to_platform_device(dev);
- struct platform_driver *pdrv = to_platform_driver(drv);
-
- 匹配设备树信息,如果有设备树,就调用 of_driver_match_device() 函数进行匹配
- if (of_driver_match_device(dev, drv))
- return 1;
-
-
- 匹配id_table
- if (pdrv->id_table)
- return platform_match_id(pdrv->id_table, pdev) != NULL;
-
- 最基本匹配规则
- return (strcmp(pdev->name, drv->name) == 0);
- }
6、解决问题
现在可以回答这两个问题了
a -- 为什么要用 platform 驱动?不用platform驱动可以吗?
b -- 设备驱动中引入platform 概念有什么好处?
引入platform模型符合Linux 设备模型 —— 总线、设备、驱动,设备模型中配套的sysfs节点都可以用,方便我们的开发;当然你也可以选择不用,不过就失去了一些platform带来的便利;
设备驱动中引入platform 概念,隔离BSP和驱动。在BSP中定义platform设备和设备使用的资源、设备的具体匹配信息,而在驱动中,只需要通过API去获取资源和数据,做到了板相关代码和驱动代码的分离,使得驱动具有更好的可扩展性和跨平台性。
三、实例
这是一个蜂鸣器的驱动,其实前面已经有解析 Linux 字符设备驱动开发基础(二)—— 编写简单 PWM 设备驱动, 下面来看一下,套上platform 外壳后的程序:
1、device.c
- #include <linux/module.h>
- #include <linux/device.h>
- #include <linux/platform_device.h>
- #include <linux/ioport.h>
-
- static struct resource beep_resource[] =
- {
- [0] ={
- .start = 0x114000a0,
- .end = 0x114000a0 + 0x4,
- .flags = IORESOURCE_MEM,
- },
-
- [1] ={
- .start = 0x139D0000,
- .end = 0x139D0000 + 0x14,
- .flags = IORESOURCE_MEM,
- }
- };
-
- static void hello_release(struct device *dev)
- {
- printk("hello_release\n");
- return ;
- }
-
-
-
- static struct platform_device hello_device=
- {
- .name = "bigbang",
- .id = -1,
- .dev.release = hello_release,
- .num_resources = ARRAY_SIZE(beep_resource),
- .resource = beep_resource,
- };
-
- static int hello_init(void)
- {
- printk("hello_init");
- return platform_device_register(&hello_device);
- }
-
- static void hello_exit(void)
- {
- printk("hello_exit");
- platform_device_unregister(&hello_device);
- return;
- }
-
- MODULE_LICENSE("GPL");
- module_init(hello_init);
- module_exit(hello_exit);
2、driver.c
- #include <linux/module.h>
- #include <linux/fs.h>
- #include <linux/cdev.h>
- #include <linux/device.h>
- #include <linux/platform_device.h>
- #include <asm/io.h>
-
- static int major = 250;
- static int minor=0;
- static dev_t devno;
- static struct class *cls;
- static struct device *test_device;
-
- #define TCFG0 0x0000
- #define TCFG1 0x0004
- #define TCON 0x0008
- #define TCNTB0 0x000C
- #define TCMPB0 0x0010
-
- static unsigned int *gpd0con;
- static void *timer_base;
-
- #define MAGIC_NUMBER 'k'
- #define BEEP_ON _IO(MAGIC_NUMBER ,0)
- #define BEEP_OFF _IO(MAGIC_NUMBER ,1)
- #define BEEP_FREQ _IO(MAGIC_NUMBER ,2)
-
- static void fs4412_beep_init(void)
- {
- writel ((readl(gpd0con)&~(0xf<<0)) | (0x2<<0),gpd0con);
- writel ((readl(timer_base +TCFG0 )&~(0xff<<0)) | (0xff <<0),timer_base +TCFG0);
- writel ((readl(timer_base +TCFG1 )&~(0xf<<0)) | (0x2 <<0),timer_base +TCFG1 );
-
- writel (500, timer_base +TCNTB0 );
- writel (250, timer_base +TCMPB0 );
- writel ((readl(timer_base +TCON )&~(0xf<<0)) | (0x2 <<0),timer_base +TCON );
- }
-
- void fs4412_beep_on(void)
- {
- writel ((readl(timer_base +TCON )&~(0xf<<0)) | (0x9 <<0),timer_base +TCON );
- }
-
- void fs4412_beep_off(void)
- {
- writel ((readl(timer_base +TCON )&~(0xf<<0)) | (0x0 <<0),timer_base +TCON );
- }
-
- static void beep_unmap(void)
- {
- iounmap(gpd0con);
- iounmap(timer_base);
- }
-
- static int beep_open (struct inode *inode, struct file *filep)
- {
- fs4412_beep_on();
- return 0;
- }
-
- static int beep_release(struct inode *inode, struct file *filep)
- {
- fs4412_beep_off();
- return 0;
- }
-
- #define BEPP_IN_FREQ 100000
- static void beep_freq(unsigned long arg)
- {
- writel(BEPP_IN_FREQ/arg, timer_base +TCNTB0 );
- writel(BEPP_IN_FREQ/(2*arg), timer_base +TCMPB0 );
-
- }
-
- static long beep_ioctl(struct file *filep, unsigned int cmd, unsigned long arg)
- {
- switch(cmd)
- {
- case BEEP_ON:
- fs4412_beep_on();
- break;
- case BEEP_OFF:
- fs4412_beep_off();
- break;
- case BEEP_FREQ:
- beep_freq( arg );
- break;
- default :
- return -EINVAL;
- }
- return 0;
- }
-
- static struct file_operations beep_ops=
- {
- .open = beep_open,
- .release = beep_release,
- .unlocked_ioctl = beep_ioctl,
- };
-
- static int beep_probe(struct platform_device *pdev)
- {
- int ret;
- printk("match ok!");
-
- gpd0con = ioremap(pdev->resource[0].start,pdev->resource[0].end - pdev->resource[0].start);
- timer_base = ioremap(pdev->resource[1].start, pdev->resource[1].end - pdev->resource[1].start);
-
- devno = MKDEV(major,minor);
- ret = register_chrdev(major,"beep",&beep_ops);
-
- cls = class_create(THIS_MODULE, "myclass");
- if(IS_ERR(cls))
- {
- unregister_chrdev(major,"beep");
- return -EBUSY;
- }
-
- test_device = device_create(cls,NULL,devno,NULL,"beep");
- if(IS_ERR(test_device))
- {
- class_destroy(cls);
- unregister_chrdev(major,"beep");
- return -EBUSY;
- }
-
- fs4412_beep_init();
-
- return 0;
- }
-
- static int beep_remove(struct platform_device *pdev)
- {
- beep_unmap();
- device_destroy(cls,devno);
- class_destroy(cls);
- unregister_chrdev(major,"beep");
-
- return 0;
- }
-
-
- static struct platform_driver beep_driver=
- {
- .driver.name = "bigbang",
- .probe = beep_probe,
- .remove = beep_remove,
- };
-
-
- static int beep_init(void)
- {
- printk("beep_init");
-
- return platform_driver_register(&beep_driver);
- }
-
- static void beep_exit(void)
- {
- printk("beep_exit");
- platform_driver_unregister(&beep_driver);
-
- return;
- }
-
-
- MODULE_LICENSE("GPL");
- module_init(beep_init);
- module_exit(beep_exit);
3、makefile
- ifneq ($(KERNELRELEASE),)
- obj-m:=device.o driver.o
- $(info "2nd")
- else
- #KDIR := /lib/modules/$(shell uname -r)/build
- KDIR := /home/fs/linux/linux-3.14-fs4412
- PWD:=$(shell pwd)
- all:
- $(info "1st")
- make -C $(KDIR) M=$(PWD) modules
- clean:
- rm -f *.ko *.o *.symvers *.mod.c *.mod.o *.order
- endif
- #include <sys/types.h>
- #include <sys/stat.h>
- #include <fcntl.h>
- #include <stdio.h>
-
- main()
- {
- int fd,i,lednum;
-
- fd = open("/dev/beep",O_RDWR);
- if(fd<0)
- {
- perror("open fail \n");
- return ;
- }
-
- sleep(10);
- close(fd);
- }























 263
263

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









