







##hough 变换
原理
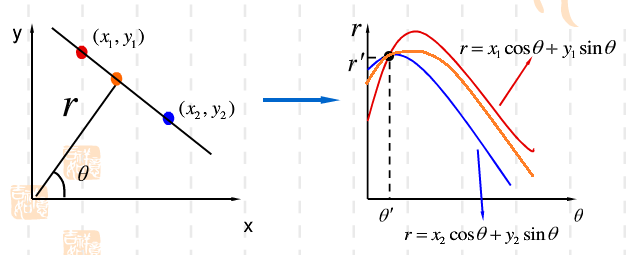
过直角坐标系下的一个点,有无数条线,每条线都有唯一的极坐标表示(ρ,Θ)。在极坐标系下的点,用经过该点的直线极坐标表示为曲线。
在直角坐标系下的一个(直线交)点,在极坐标系下可表示为一个曲线。
在直角坐标系下的一条直线,在极坐标系下可表示为一个(曲线交)点。
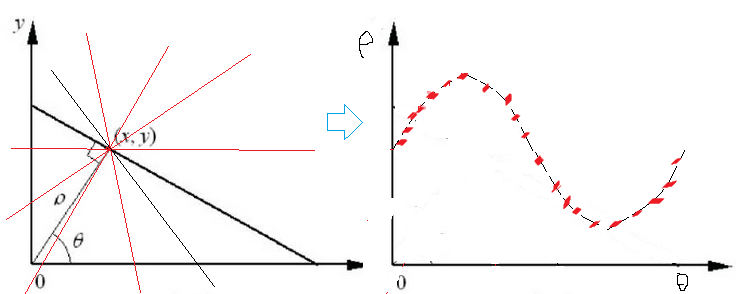
直角坐标系下的直线,在极坐标系下则表示为曲线交点(包含同一条直线)
详细介绍
http://blog.csdn.net/on2way/article/details/47028969
分析这么多,可想而知那么一个hough变换在算法设计上就可以如下步骤:
(1)将参数空间(ρ,θ)量化,赋初值一个二维矩阵M,M(ρ,θ)就是一个累加器了。
(2)然后对图像边界上的每一个点进行变换,变换到属于哪一组(ρ,θ),就把该组(ρ,θ)对应的累加器数加1,这里的需要变换的点就是上面说的经过边缘提取以后的图像了。
(3)当所有点处理完成后,就来分析得到的M(ρ,θ),设置一个阈值T,认为当M(ρ,θ)>T,就认为存在一条有意义的直线存在。而对应的M(ρ,θ)就是这组直线的参数,至于T是多少,自己去式,试的比较合适为止。
(4)有了M(ρ,θ)和点(x,y)计算出来这个直线就ok了。
说了这么多,这就是原理上hough变换的最底层原理,事实上完全可以自己写程序去实现这些,然而,也说过,hough变换是一个耗时耗力的算法,自己写循环实现通常很慢,曾经用matlab写过这个,也有实际的hough变换例子可以看看:
虹膜识别(三):Hough变换检测内圆边缘
那么我们在实际中大可不必自己写,opencv已经集成了hough变换的函数,调用它的函数效率高,也很简单。
Opencv中检测直线的函数有cv2.HoughLines(),cv2.HoughLinesP()
函数cv2.HoughLines()返回值有三个(opencv 3.0),实际是个二维矩阵,表述的就是上述的(ρ,θ),其中ρ的单位是像素长度(也就是直线到图像原点(0,0)点的距离),而θ的单位是弧度。
这个函数有四个输入,第一个是二值图像,上述的canny变换后的图像,二三参数分别是ρ和θ的精确度,可以理解为步长。第四个参数为阈值T,认为当累加器中的值高于T是才认为是一条直线。自己画了个图实验一下:
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('line.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度图像
#open to see how to use: cv2.Canny
#http://blog.csdn.net/on2way/article/details/46851451
edges = cv2.Canny(gray,50,200)
plt.subplot(121),plt.imshow(edges,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
lines = cv2.HoughLines(edges,1,np.pi/180,160)
lines1 = lines[:,0,:]#提取为为二维
for rho,theta in lines1[:]:
a = np.cos(theta)
b = np.sin(theta)
x0 = a*rho
y0 = b*rho
x1 = int(x0 + 1000*(-b))
y1 = int(y0 + 1000*(a))
x2 = int(x0 - 1000*(-b))
y2 = int(y0 - 1000*(a))
cv2.line(img,(x1,y1),(x2,y2),(255,0,0),1)
plt.subplot(122),plt.imshow(img,)
plt.xticks([]),plt.yticks([])
函数cv2.HoughLinesP()是一种概率直线检测,我们知道,原理上讲hough变换是一个耗时耗力的算法,尤其是每一个点计算,即使经过了canny转换了有的时候点的个数依然是庞大的,这个时候我们采取一种概率挑选机制,不是所有的点都计算,而是随机的选取一些个点来计算,相当于降采样了。这样的话我们的阈值设置上也要降低一些。在参数输入输出上,输入不过多了两个参数:minLineLengh(线的最短长度,比这个短的都被忽略)和MaxLineCap(两条直线之间的最大间隔,小于此值,认为是一条直线)。输出上也变了,不再是直线参数的,这个函数输出的直接就是直线点的坐标位置,这样可以省去一系列for循环中的由参数空间到图像的实际坐标点的转换。
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread('room.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)#灰度图像
#open to see how to use: cv2.Canny
#http://blog.csdn.net/on2way/article/details/46851451
edges = cv2.Canny(gray,50,200)
plt.subplot(121),plt.imshow(edges,'gray')
plt.xticks([]),plt.yticks([])
#hough transform
lines = cv2.HoughLinesP(edges,1,np.pi/180,30,minLineLength=60,maxLineGap=10)
lines1 = lines[:,0,:]#提取为二维
for x1,y1,x2,y2 in lines1[:]:
cv2.line(img,(x1,y1),(x2,y2),(255,0,0),1)
plt.subplot(122),plt.imshow(img,)
plt.xticks([]),plt.yticks([])
C++: void HoughLinesP(InputArray image, OutputArray lines, double rho, double theta, int threshold, double minLineLength=0, double maxLineGap=0 )
第一个参数,InputArray类型的image,输入图像,即源图像,需为8位的单通道二进制图像,可以将任意的源图载入进来后由函数修改成此格式后,再填在这里。
第二个参数,InputArray类型的lines,经过调用HoughLinesP函数后后存储了检测到的线条的输出矢量,每一条线由具有四个元素的矢量(x_1,y_1, x_2, y_2) 表示,其中,(x_1, y_1)和(x_2, y_2) 是是每个检测到的线段的结束点。
第三个参数,double类型的rho,以像素为单位的距离精度。另一种形容方式是直线搜索时的进步尺寸的单位半径。
第四个参数,double类型的theta,以弧度为单位的角度精度。另一种形容方式是直线搜索时的进步尺寸的单位角度。
第五个参数,int类型的threshold,累加平面的阈值参数,即识别某部分为图中的一条直线时它在累加平面中必须达到的值。大于阈值threshold的线段才可以被检测通过并返回到结果中。
第六个参数,double类型的minLineLength,有默认值0,表示最低线段的长度,比这个设定参数短的线段就不能被显现出来。
第七个参数,double类型的maxLineGap,有默认值0,允许将同一行点与点之间连接起来的最大的距离。















 375
375

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









