







关于数组,大家并不陌生,几乎所有的程序设计语言都把数组类型设为了固有类型。
数组是n(n>1)个相同类型数据元素构成的有限序列,它是下标-值偶对的集合,即集合中的每一个元素都是由一个值和一组下标组成的。
数组一般分为一维、二维、三维数组,其中二维数组也称为矩阵,本文主要讲解对于矩阵中稀疏矩阵的相关操作算法。
稀疏矩阵
在矩阵中,当数值为0的元素远远多于非0元素的个数,且非0元素的分布并没有规律时,称该矩阵为稀疏矩阵。
例如:
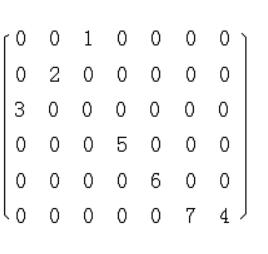
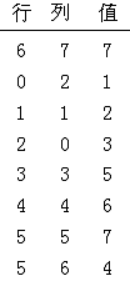
对于稀疏矩阵,我们通常采用三元组的形式来进行压缩,不考虑0元素的个数和位置,只记录非0元素的行列位置和数据值。
三元组:(行号,列号,值)
上图的稀疏矩阵的三元组表示为:
假设以顺序存储结构来存储三元组表,则可以得到稀疏矩阵的一种压缩方式——三元组顺序表。
三元组顺序表
三元组顺序表的相关定义
#include<iostream>
using namespace std;
#define maxsize 1000 //最大存储容量
#define OK 1
#define FALSE 0
typedef int ElemType;
typedef int status;
typedef struct {
int i, j; //行列号
ElemType e; //值
}Triple; //三元组(行号,列号,值)
typedef struct {
Triple data[maxsize + 1];
int mu, nu, tu; //稀疏矩阵的行数,列数,非零元个数
}TSMatrix; //稀疏矩阵
故此时稀疏矩阵的图示为:

稀疏矩阵的输入
首先输入一个稀疏矩阵,然后将其压缩成三元组表。
void CreateMatrix(TSMatrix &M)
{
int A[100][100];
int a, b; //a,b用来存储矩阵的行号列号
int h, l;
int m=0; //m为非零元个数计数器
cout << "请输入矩阵的行号、列号:";
cin >> a >> b;
for (h = 1; h <= a; h++)
for (l = 1; l <= b; l++)
{
cin >> A[h][l];
}
cout << endl;
for (h = 1; h <= a; h++) //将稀疏矩阵的非零元个数表示为三元组表
{
for (l = 1; l <= b; l++)
{
if (A[h][l] != 0)
{
m++;
M.data[m].i = h;
M.data[m].j = l;
M.data[m].e = A[h][l];
}
}
M.tu = m;
M.mu = a;
M.nu = b;
}
}
稀疏矩阵的输出
以三元组表的形式输出非零元素
void PrintTriple(TSMatrix M)
{ // 输出稀疏矩阵M的三元组表示
int i;
cout << M.mu << "行" << M.nu << "列" << M.tu << "个非零元素" << endl << endl;
cout << "行" << " 列" << " 元素值" << endl;
for (i = 1; i <= M.tu; i++)
cout << M.data[i].i << " " << M.data[i].j << " " << M.data[i].e << endl ;
cout << endl;
}
输出稀疏矩阵
将有三元组表中对应位置的元素赋值,其余的均赋值为0
void PrintMatrix(TSMatrix M)
{ //输出稀疏矩阵M
int A[100][100];
int a, b,k=1; //k为三元组表中元素个数的计数器
for (a = 1; a <= M.mu; a++) //将三元组表转化为稀疏矩阵
{
for (b = 1; b <= M.nu; b++)
{
if (a == M.data[k].i && b == M.data[k].j)
{
A[a][b] = M.data[k].e;
k++;
}
else
{
A[a][b] = 0;
}
}
}
cout << "稀疏矩阵为:" << endl;
for (a = 1; a <= M.mu; a++)
{
for (b = 1; b <= M.nu; b++)
cout << A[a][b] << " ";
cout << endl;
}
}
稀疏矩阵的转置算法
转置运算
status TransposeMatrix(TSMatrix M,TSMatrix &T)
{ //稀疏矩阵的转置
int p, q,col;
ElemType e;
//q代表转置后矩阵的元素计数器,p代表原矩阵中元素的计数器,e代表元素值,col代表行号顺序
T.mu = M.nu;
T.nu = M.mu;
T.tu = M.tu;
if (T.tu)
{
q = 1;
for (col = 1; col <= M.nu; col++)
for (p = 1; p <= M.tu; p++)
{
if (M.data[p].j == col)
{
T.data[q].i = M.data[p].j;
T.data[q].j = M.data[p].i;
T.data[q].e = M.data[p].e;
q++;
}
}
}
return OK;
}
快速转置
由于上面算法的时间复杂度太高,为O(M.nu*M.mu),故将算法改进,降低时间复杂度。
思路如下:
- 求原矩阵中每一行的三元组个数
- 求原矩阵中的每一行中第一个三元组在转置后矩阵中的序号
- 讲原矩阵中每个三元组根据序号依次转换到转置后矩阵的相应位置
故在原矩阵中增加了
- 数组num来记录原矩阵中每列的非零元素个数(即转置后矩阵中每行的非零元个数)
- 数组pos来记录转置后矩阵中每行第一个元素的位置
status TransposeMatrix_plus(TSMatrix M, TSMatrix& T)
{ //稀疏矩阵转置的改进版,快速转置
//在原矩阵中增加了num[j]来记录原矩阵M中每列的非零元素个数,即转置后T中每行的非零元个数
//增加了pos[j]来记录转置后矩阵T中每行第一个元素的位置
int i, j, k;
int* num = (int*)malloc(M.nu * sizeof(int));
int* pos = (int*)malloc(M.nu * sizeof(int));
T.mu = M.nu;
T.nu = M.mu;
T.tu = M.tu;
if (M.tu)
{
//第一步:确定M中每一列的num值
for (j = 1; j <= M.nu; j++)
{
num[j] = 0; //将M中的每一列(T中的每一行)的num先设定为零
}
for (k = 1; k <= M.tu; k++)
{
num[M.data[k].j]++; //遍历整个M矩阵,统计M中每一列(T中的每一行)元素个数num
}
//第二步:确定T中各行元素的起始位置pos值
for (j = 2; j <= M.nu; j++)
{
pos[1] = 1;
pos[j] = pos[j - 1] + num[j - 1];
}
//第三步:依次转置矩阵
for (k = 1; k <= M.tu; k++)
{
j = M.data[k].j;
T.data[pos[j]].j = M.data[k].i;
T.data[pos[j]].i = M.data[k].j;
T.data[pos[j]].e = M.data[k].e;
pos[j]++;
}
}
return OK;
}
随意编写了个主函数来进行测试,转置用的是快速转置算法
void main()
{
TSMatrix A, B;
CreateMatrix(A);
PrintTriple(A);
TransposeMatrix_plus(A, B);
cout << "转置后" << endl;
PrintMatrix(B);
}
运行结果如下:

- 走得多慢都无所谓,只要你不停下脚步。
仪式感过后,人烟消散,最委屈的还是主角。















 2670
2670











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









