







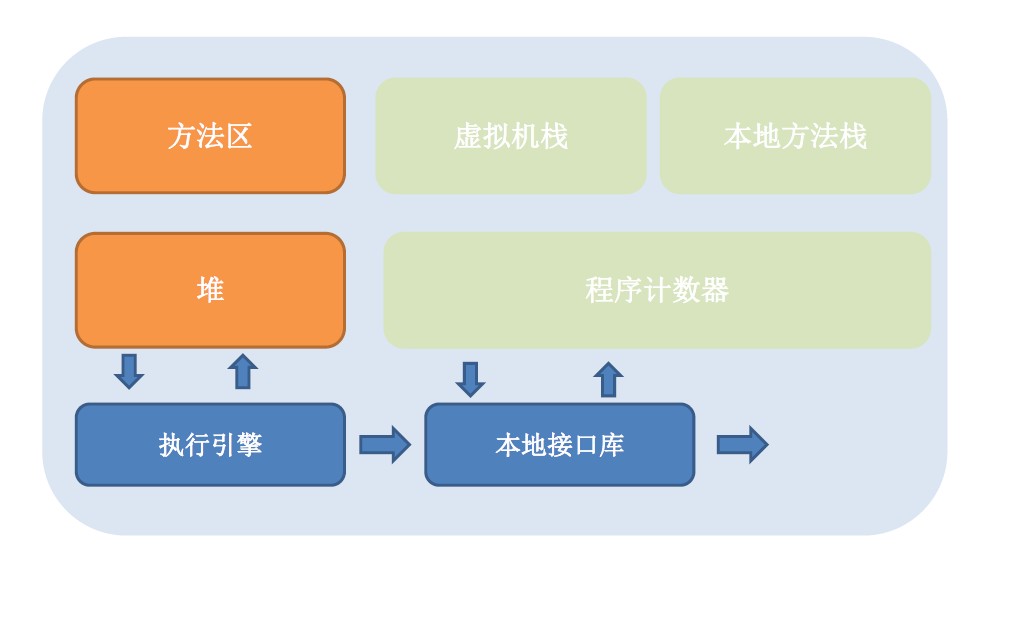
程序计数器:
程序计数器是一块较小的内存空间,它的作用可以看作是当前线程所执行的字节码的行号指示器。在虚拟机的概念模型里,字节码解释器工作时就是通过改变这个计数器的值来选取下一条需要执行的字节码指令,分支、循环、跳转、异常处理、线程恢复等基础功能都需要依赖这个计数器完成。每个线程都有自己的计数器。
如果线程正在执行的是一个Java方法,这个计数器记录的是正在执行的虚拟机字节码指令的地址;如果正在执行的是Native方法,这个计数器的值为空(Undefined)。
此区域占用内存非常少,不会内存溢出的情况。
Java虚拟机栈:
Java虚拟机栈描述的是Java方法执行的内存模型:每个方法被执行的时候都会同时创建一个栈帧(Stack Frame)用于存储局部变量表、操作数栈、动态链接、方法出口等信息。每一个方法被调用直至执行完成的过程,就对应着一个栈帧在虚拟机栈中从入栈到出栈的过程。
经常有人把Java内存分为堆内存和栈内存,这种分法比较粗糙,Java内存区域的划分实际上远比这复杂。其中所说的栈就是虚拟机栈,或者说是虚拟机栈中的局部变量部分。
局部变量表存放了编译期可知的各种基本数据类型(boolean、byte、char、short、int、float、long、double)、对象引用和returnAddress类型(指向了一条字节码指令的地址)。
其中64位长度的long和double类型的数据会占用2个局部变量空间(Slot),其余的数据类型只占用1个。局部变量所属的内存空间在编译期间完成分配,当进入一个方法时,这个方法需要的帧中分配多大的局部变量空间是完全确定的,在方法运行期间不会改变局部变量表的大小。
Java虚拟机规范中对这个区域规定了两个异常状况:如果线程请求的栈深度大于虚拟机说允许的深度,抛出StackOverflowError异常;如果虚拟机栈可以动态扩展,当扩展时无法申请到足够内存时抛出OutOfMemoryError异常。
本地方法栈:
本地方法栈与虚拟机栈所发挥的作用是非常相似的,其区别不过是虚拟机栈为虚拟机执行Java方法(字节码)服务,而本地方法则是虚拟机使用到的Native方法服务。虚拟机规范中对本地方法栈中的方法使用的语言、使用方式和数据结构并没有强制规定,因此具体的虚拟机可以自由实现它。甚至与虚拟机栈合二为一。本地方法栈区域也会抛出StackOverflowError和OutOfmemoryError异常。
java堆:
Java堆是被所有线程共享的一块内存区域,在虚拟机启动时创建。此内存区域的唯一目的就是存放对象实例,几乎所有的对象实例都在这里分配内存。
Java堆是垃圾收集器管理的主要区域,因此很多时候也被称为“GC堆”。如果从内存回收的角度看,由于现在收集器基本上都是采用的分代收集算法,所以Java堆还可以细分为:新生代和老年代;再细致一点的有Eden空间、From Survivor空间、To Survivor空间等。如果从内存分配角度看,线程共享的Java堆中可能划分出多个线程私有的分配缓冲区。进一步划分的目的是为了更好的回收内存,存储的都仍然是对象实例。
方法区:
方法区用于存放已被虚拟机加载的类信息、常量、静态变量、即时编译器编译后的代码等数据。虽然Java虚拟机规范把方法区描述为堆的一个逻辑部分,但是它却有一个别名叫做Non-Heap。
Java虚拟机规范对方法区的限制非常宽松,除了和Java堆一样不需要连续的内存和可以选择固定大小或者可扩展外,还可以选择不实现垃圾收集。这个区域的内存回收目标主要是针对常量池的回收和对类型的卸载,一般来说这个区域的回收效果比较难以令人满意。当方法区无法满足内存分配需求时,抛出OutOfMemoryError异常。
运行时常量池:
运行时常量池(Runtime Constant Pool)是方法区的一部分,Class文件中除了有类的版本、字段、方法、接口等描述信息外,还有一项信息是常量池,用于存放编译期生成的各种字面量和符号引用,这部分内容将在类加载后存放到方法区的运行时常量池中。
运行时常量池相对于Class文件常量池的另一个重要特征是具备动态性,Java语言并不要求常量一定只能在编译期产生,也就是并非预置入Class文件中常量池的内存才能进入方法区运行时常量池,运行期间也可能将新的常量放入池中,这种特性被被使用的较多的是String类的intern()方法。
当常量池无法再申请到内存的时候会抛出OutOfMemoryError异常。















 1324
1324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









