







一、线程取消相关函数
1pthread_cancel().线程取消函数
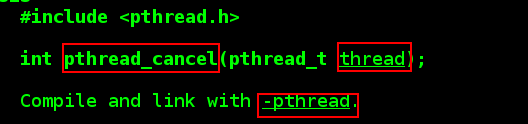
成功返回0,失败返回错误码。
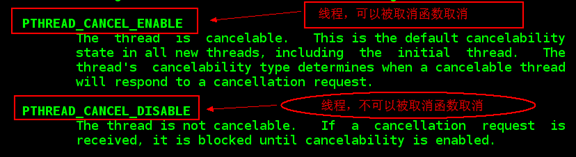
2.pthread_setcancelstate().设置线程取消状态

成功返回0,失败返回错误码。
该函数第一个参数,有两种情况(响应和不响应取消函数),第二个参数就旧状态,一般为空。
3.pthread_setcanceltype().设置取消类型
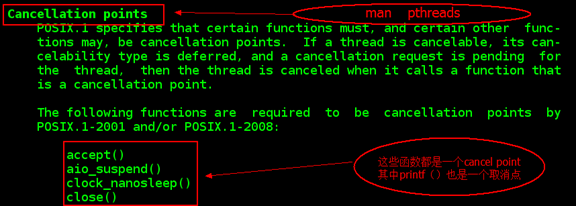
在可取消的状态下 ,又分为立即取消和延时取消。
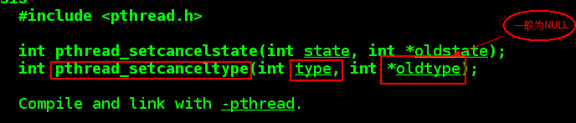
成功返回0,失败返回错误码。
该函数第一个参数:有两个种状态立即取消和延时取消,第二个参数就旧状态,一般为空
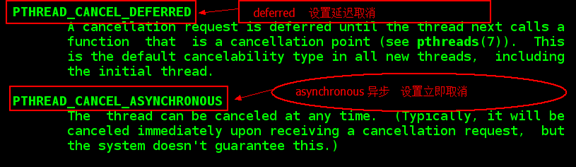
扩展:延时取消涉及到一个取消点(cancel point),在书册中man pthreads
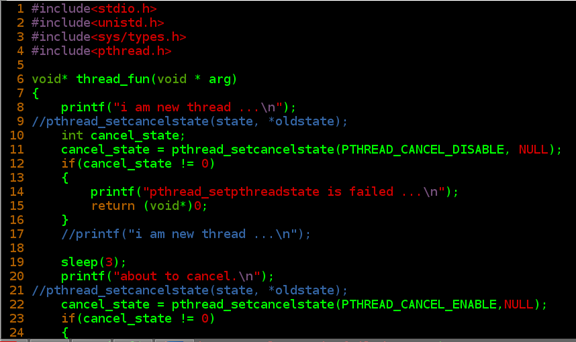
二:代码
#include<stdio.h>
#include<unistd.h>
#include<sys/types.h>
#include<pthread.h>
void* thread_fun(void * arg)
{
printf("i am new thread ...\n");
//pthread_setcancelstate(state, *oldstate);
int cancel_state;
cancel_state = pthread_setcancelstate(PTHREAD_CANCEL_DISABLE, NULL);
if(cancel_state != 0)
{
printf("pthread_setpthreadstate is failed ...\n");
return (void*)0;
}
//printf("i am new thread ...\n");
sleep(3);
printf("about to cancel.\n");
//pthread_setcancelstate(state, *oldstate);
cancel_state = pthread_setcancelstate(PTHREAD_CANCEL_ENABLE,NULL);
if(cancel_state != 0)
{
printf("pthread_setcancelstate is failed ...\n");
return (void*)0;
}
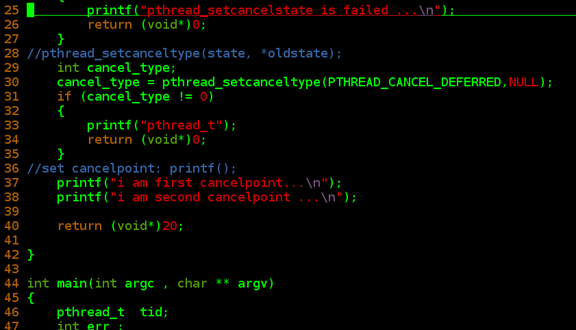
//pthread_setcanceltype(state, *oldstate);
int cancel_type;
cancel_type = pthread_setcanceltype(PTHREAD_CANCEL_DEFERRED,NULL);
if (cancel_type != 0)
{
printf("pthread_t");
return (void*)0;
}
//set cancelpoint: printf();
printf("i am first cancelpoint...\n");
printf("i am second cancelpoint ...\n");
return (void*)20;
}
int main(int argc , char ** argv)
{
pthread_t tid;
int err ;
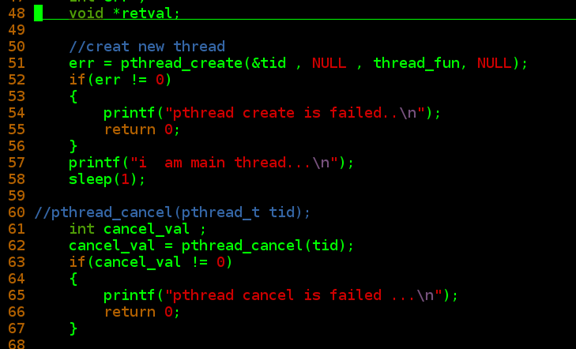
void *retval;
//creat new thread
err = pthread_create(&tid , NULL , thread_fun, NULL);
if(err != 0)
{
printf("pthread create is failed..\n");
return 0;
}
printf("i am main thread...\n");
sleep(1);
//pthread_cancel(pthread_t tid);
int cancel_val ;
cancel_val = pthread_cancel(tid);
if(cancel_val != 0)
{
printf("pthread cancel is failed ...\n");
return 0;
}
// pthread_join(pthread_t tid ,void**retval);
int join_val;
join_val = pthread_join(tid,&retval);
if(join_val != 0)
{
printf("pthread join is failed ...\n");
return 0;
}
//printf(" new thread exit coid");
printf("the new thread exit code is %d\n",(int *)retval);
return 0;
}
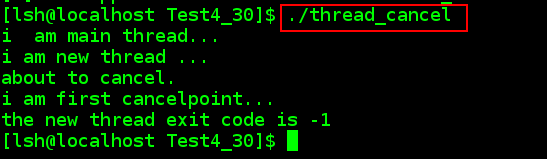
运行程序















 91
91











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









