







 本文探讨了二叉树中结点的前驱和后继节点的概念,通过先序、中序和后序遍历的方式详细阐述了如何找到这些节点,并给出了C++实现的讨论及代码测试。
本文探讨了二叉树中结点的前驱和后继节点的概念,通过先序、中序和后序遍历的方式详细阐述了如何找到这些节点,并给出了C++实现的讨论及代码测试。
前提
二叉树的几何结构和遍历路径,是查找前驱和后继的基础。
结点分类
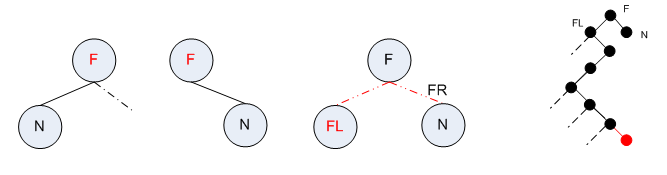
几何结构千变万化,但单个结点必然和至多3点邻接:左(或右)父,左子和右子。按照“X”型助记,交叉点为研究对象。为求结点N的前驱结点Pre和后继结点Suc,设N的左子lchild,右子rchildm,N的左父亲lparent,右父亲rparent;

先后顺序
同一几何结构,不同的遍历方式得到不同的遍历路径;具体到单个结点,也就有不同的前驱结点和后继结点。
定义的二叉树数据结构(C++)
template<typename T> struct BNode
{
T m_data;
BNode<T>* rchild;
BNode<T>* lchild;
BNode<T>* parent;
int ltag;
int rtag;
BNode(T data=0):m_data(data),rchild(NULL),lchild(NULL),parent(NULL),ltag(0),rtag(0){}
};
template<typename T> struct BTree
{
BNode<T>* m_root;
BNode<T>* index;
BNode<T>* pre;
T m_data;
BTree(BNode<T>* root=NULL,T data=0):m_root(root),m_data(data),pre(NULL){}
}具体讨论
4.1 先序遍历
先序前驱与后序后继,先序后继与后续前驱,和中序前驱与中序后继,分别形成3对镜像过程。
4.1.1 先序前驱
- 若当前节点拥有右父亲节点,则Pre=node->parent;
- 若当前节点拥有左父亲节点,且父亲节点左子树为空,则Pre=node->parent;
- 若当前节点拥有左父亲节点,且父亲节点左子树不为空,则Pre等于父亲节点左子树的最右的末节点(至右至左);
T get_pre_pre(BNode<T>* root)//先序遍历的前驱节点
{
if(root==NULL)
{
return 0;
}
BNode<T>* father=root->parent;
if(!father)
{
return 0;
}
if(root==father->lchild)
{
return father->m_data;
}
else if(root==father->rchild)
{
if(!father->lchild)
{
return 0;
}
BNode<T>* child=father->lchild;
while(child->rchild||child->lchild)
{
while(child->rchild)
{
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









