







自动驾驶-决策规划算法七:B样条曲线(C++)
搞要:
本文介绍无人驾驶决策规划算法中的B样条曲线。
语言用的是C++,图形基于easyX库输出。
如有错误或者遗漏之处,欢迎指出。
//由于本文关注的是曲线的轨迹生成算法,所以并没有对航向角进行规划,也没有加上控制,所以在动态展示时只用平移来示意车辆沿着轨迹行驶。
//限于时间关系,公式就不用公式编辑器了,用截图替代,大家看得懂就行;

附赠自动驾驶学习资料和量产经验:链接
基本概念:
B样条曲线概述:
样条是一根富有弹性的细木条或塑料条,在应用CAD/CAM技术以前,制造业普遍采用手工绘制自由曲线。绘制员用压铁压住样条,使其通过所有给定的型值点,再适当地调整压铁,改变样条形态,直到符合设计要求;
B样条曲线是B样条基函数(给定区间上的所有样条函数组成一个线性空间)的线性组合;
贝塞尔曲线的缺陷:
1,确定了多边形的顶点数(n+1个),也就决定了所定义的贝塞尔曲线的阶次(n次),这样很不灵活;
2,当顶点数(n+1)较大时,曲线的次数较高,曲线的导数次数也会较高,因此曲线会出现较多的峰谷值,不利于车辆轨迹的规划;
3,贝塞尔曲线无法进行局部修改,不够灵活;
B样条曲线除了保持Bezier曲线所具有的有点外,还弥补了上述所有的缺陷;
B样条曲线的数学描述:
设有P0, P1 … Pn一共n+1个控制点,这些控制点用于定义样条曲线的走向、界限范围,则k阶B样条曲线的定义为:
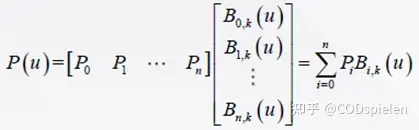
式中,k是阶数,Bik(u)是第i个k阶B样条基函数,与控制点Pi相对应,k≥1;u是自变量,相当于贝塞尔曲线中的t,但定义域可以不是[0, 1],而首末值通常还是定义为0和1,然后取中间一段作为最终定义域;
基函数具有如下德布尔考克斯递推式:
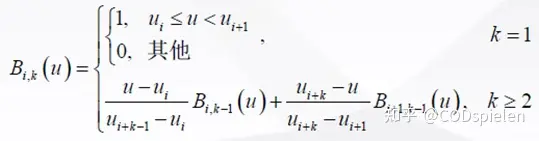
约定:0/0=0;
ui是一组被称为节点矢量的非递减序列的连续变化值,首末值可以定义为0和1,该序列如下:

根据递推式,当阶数k=1时,不同基函数的非零域如下图:
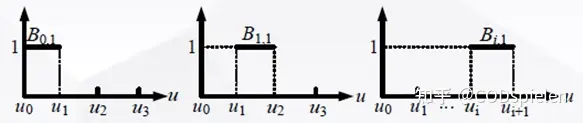
也就是说,k=1时,只有在i对应的u的区间内,Bik才等于1,其他区间都等于0,这也反应了基函数Bik和第i个控制点的对应关系;
k=1时,i从1到k,每个Bik是最基本的基函数,通过上述递推式构成了更高阶的基函数,最终构成整个B样条曲线的表达式,如下图所示;

这是一个4阶B样条曲线,k=4,控制点个数为n,P0为第0个控制点,对应的德布尔考克斯基函数是B04, B14一直到Bn4;
而B04通过递推式可以分解为由B01, B11, B21, B31构成,而这几个最基本的基函数分别在[u0, u1), [u1, u2), [u2, u3), [u3, u4)上才有值,为1;
Bik递推到Bi1后,u的次幂会变为k-1,也就是说K阶B样条曲线是关于u的k-1次曲线,这里和贝塞尔曲线有区别,贝塞尔曲线的阶数和t的次数是相等的,例如3次贝塞尔曲线:

B样条曲线的段数为(n+1) - (k-1) = n-k+2,每段是一小段贝塞尔曲线,证明过程略;
Bik(u)涉及到的节点为ui, u(i+1)…u(i+k),一共k+1个节点,k个区间,因此从B0k(u)到Bnk(u)共涉及n+k+1个节点;
开B样条曲线:起点和终点没有相连;闭B样条曲线:起点和终点相连;
对于闭B样条曲线,u的定义域可以设为[0, 1];
对于汽车轨迹规划,通常用开B样条曲线,u的定义域为[u(k-1), u(n+1)],从u(k-1)开始可以让每个控制点对应的基函数Bik(u)都不为0,可以让每个控制点都对曲线有控制作用,可以表达出完整的线性组合;
阶数k必须小于等于控制点数n+1;
k阶B样条曲线上的一点至多与k个控制顶点有关,与其他控制顶点无关。移动曲线一个控制顶点,至多影响定义在区间上那部分曲线的形状,对曲线的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









