







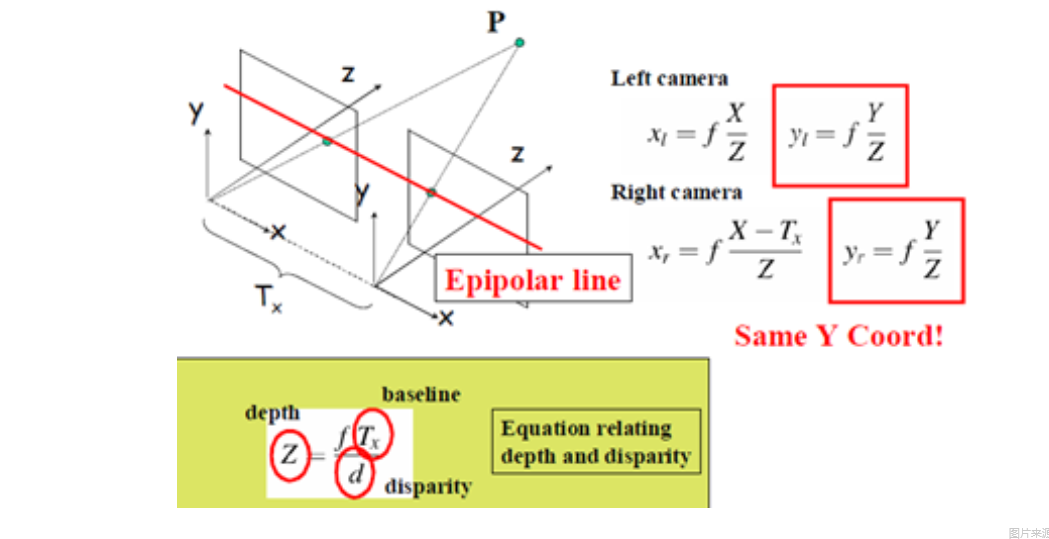
基本原理
详细原理请阅读这篇文章http://www.360doc.com/content/14/0205/15/10724725_349968116.shtml.
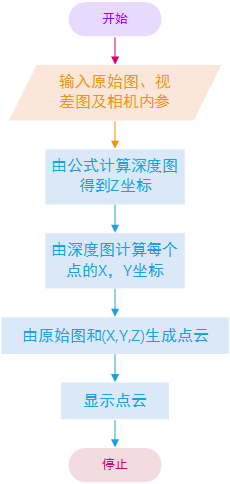
基本流程
代码
本代码运行需要在VS上配置好opencv3.1+openNI+PCL,opencv3.1的配置可以在网上找到很多资料,openNI和PCL的配置可以参看上一篇博文下http://blog.csdn.net/u014283958/article/details/52599457
下面是代码:
//by shuishui shiwenjun 20160926
#include <pcl/visualization/cloud_viewer.h>
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <opencv2/opencv.hpp>
usingnamespace cv;
usingnamespacestd;
usingnamespace pcl;
int user_data;
//相机内参,根据输入改动
constdouble u0 = 1329.49 / 4;//由于后面resize成原图的1/4所以有些参数要缩小相同倍数
constdouble v0 = 954.485 / 4;
constdouble fx = 6872.874 / 4;
constdouble fy = 6872.874 / 4;
constdouble Tx = 174.724;
constdouble doffs = 293.97 / 4;
void viewerOneOff(visualization::PCLVisualizer& viewer)
{
viewer.setBackgroundColor(0.0, 0.0, 0.0);
}
int main()
{
PointCloud<PointXYZRGB>cloud_a;
PointCloud<PointXYZRGB>::Ptr cloud(new PointCloud<PointXYZRGB>);
Mat color1 = imread("im0.png");
Mat depth = imread("Sword1_perfect_d.png");
Resize
//color1.resize();
Mat color;
resize(color1, color,Size(color1.cols/4,color1.rows/4), 0, 0,CV_INTER_LINEAR);
//imshow("h",color);
//waitKey(0);
int rowNumber = color.rows;
int colNumber = color.cols;
cloud_a.height = rowNumber;
cloud_a.width = colNumber;
cloud_a.points.resize(cloud_a.width * cloud_a.height);
for (unsignedint u = 0; u < rowNumber; ++u)
{
for (unsignedint v = 0; v < colNumber; ++v)
{
/*unsigned intnum = rowNumber*colNumber-(u*colNumber + v)-1;*/
unsignedint num = u*colNumber + v;
double Xw = 0, Yw = 0, Zw = 0;
Zw = fx*Tx / (((double)depth.at<Vec3b>(u, v)[0]) + doffs);
Xw = (v+1 - u0) * Zw / fx;
Yw = (u+1 - v0) * Zw / fy;
cloud_a.points[num].b =color.at<Vec3b>(u, v)[0];
cloud_a.points[num].g =color.at<Vec3b>(u, v)[1];
cloud_a.points[num].r =color.at<Vec3b>(u, v)[2];
cloud_a.points[num].x =Xw;
cloud_a.points[num].y =Yw;
cloud_a.points[num].z =Zw;
}
}
*cloud = cloud_a;
visualization::CloudViewerviewer("Cloud Viewer");
viewer.showCloud(cloud);
viewer.runOnVisualizationThreadOnce(viewerOneOff);
while (!viewer.wasStopped())
{
user_data = 9;
}
return0;
}效果图
输入:
“im0.png”可以从http://vision.middlebury.edu/stereo/data/scenes2014/datasets/Sword1-perfect/im0.png 下载;
“Sword1_perfect_d.png”
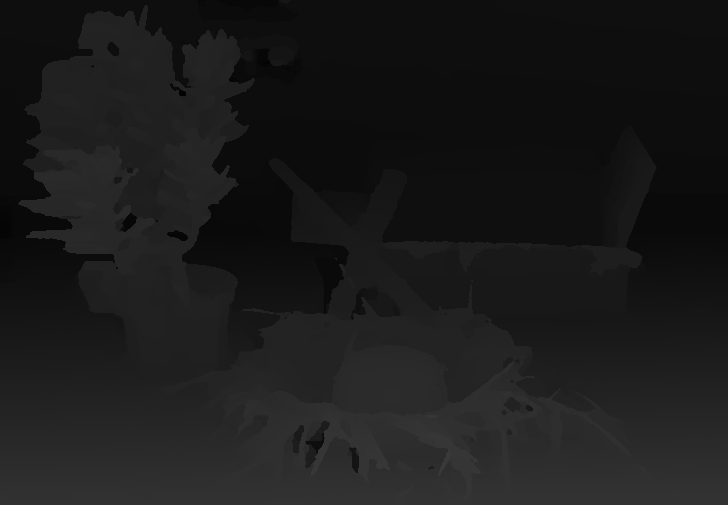
输出:
点云截图1
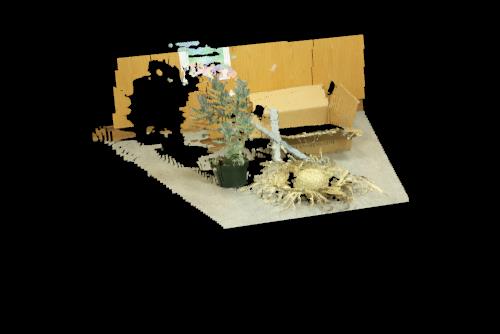
点云截图2
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









