







握手的时候,会监听主机是否发来同步消息(UART或者USB)
#define UART_SYNC_TIME (150) /* in ms */
// 150 ms 内没有反馈,则表示握手失败
// 接着往下面跑: load uboot / kernel
static bool uart_listen(struct bldr_comport *comport, uint8 *data, uint32 size, int retry, uint32 tmo_ms)
{
u8 c = 0;
int rx_cnt = 0;
int tmo_en = (tmo_ms) ? 1 : 0;
ulong start_time;
for (; retry > 0; retry--) {
start_time = get_timer(0);
while(1) {
if (tmo_en && (get_timer(start_time) > tmo_ms))
break;
/* kick watchdog to avoid cpu reset */
if (!tmo_en)
platform_wdt_kick();
GetUARTBytes(&c, 1, 10);
if (c != 0) {
*data++ = (uint8)c;
rx_cnt++;
}
if (rx_cnt == size)
return TRUE;
}
}
return FALSE;
}
其中 get_timer 就是获得定时器转换成MS的整数:
ulong get_timer (ulong base)
{
ulong current_timestamp = 0;
ulong temp = 0;
current_timestamp = get_timer_masked ();
if (current_timestamp >= base)
{ /* timestamp normal */
return (current_timestamp - base);
}
/* timestamp overflow */
//print("return = 0x%x\n",MAX_TIMESTAMP_MS - ( base - current_timestamp ));
temp = base - current_timestamp;
return (MAX_TIMESTAMP_MS - temp);
}
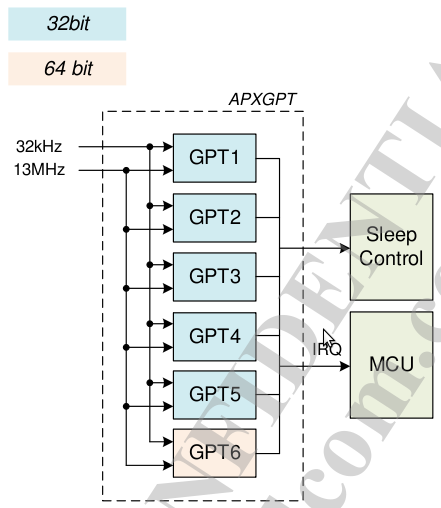
// 得到定时器的值,这里我们用的是定时器4
static ulong get_timer_masked (void)
{
volatile U32 now;
now = gpt4_tick2time_ms (*GPT4_DAT);
if (now >= lastinc)
{
timestamp = timestamp + now - lastinc; /* normal */
}
else
{
timestamp = timestamp + MAX_REG_MS - lastinc + now; /* overflow */
}
lastinc = now;
gpt4_tick2time_ms (*GPT4_DAT);
由定时器tick数,转换成ms数
U32 gpt4_tick2time_ms (U32 tick)
{
return ((tick + (GPT4_1MS_TICK - 1)) / GPT4_1MS_TICK);
}
其中: #define GPT4_1MS_TICK ((U32)13000) // 1000000 / 76.92ns = 13000.520
表示这个时候的晶振是:13M.















 398
398











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









