







上一节中,我们大致地讲解了一下CPUFreq在用户空间的sysfs接口和它的几个重要的数据结构,同时也提到,CPUFreq子系统把一些公共的代码逻辑组织在一起,构成了CPUFreq的核心部分,这些公共逻辑向CPUFreq和其它内核模块提供了必要的API,像cpufreq_governor、cpufreq_driver等模块通过这些API来完成一个完整的CPUFreq体系。这一节我们就来讨论一下核心架构的代码架构以及如何使用这些公共的API接口。
/*****************************************************************************************************/
声明:本博内容均由http://blog.csdn.net/droidphone原创,转载请注明出处,谢谢!/*****************************************************************************************************/
核心部分的代码都在:/drivers/cpufreq/cpufreq.c中,本系列文章我使用的内核版本是3.10.0.
1. CPUFreq子系统的初始化
先看看具体的代码:
- static int __init cpufreq_core_init(void)
- {
- int cpu;
- if (cpufreq_disabled())
- return -ENODEV;
- for_each_possible_cpu(cpu) {
- per_cpu(cpufreq_policy_cpu, cpu) = -1;
- init_rwsem(&per_cpu(cpu_policy_rwsem, cpu));
- }
- cpufreq_global_kobject = kobject_create_and_add("cpufreq", &cpu_subsys.dev_root->kobj);
- BUG_ON(!cpufreq_global_kobject);
- register_syscore_ops(&cpufreq_syscore_ops);
- return 0;
- }
- core_initcall(cpufreq_core_init);
可见,在系统的启动阶段,经由initcall机制,cpufreq_core_init被调用,由它来完成核心部分的初始化工作,其中:
cpufreq_policy_cpu 是一个per_cpu变量,在smp的系统下,每个cpu可以有自己独立的调频policy,也可以所有的cpu都是用一种policy,这时候就有可能出现其中一个cpu管理着某个policy,而其它cpu因为也使用同一个policy,这些cpu的policy的就交由那个管理cpu代管,这个per_cpu变量就是用来记录各个cpu的policy实际上是由那个cpu进行管理的。初始化时都被初始化为-1了,代表现在还没有开始进行policy的管理。
接下来的kobject_create_and_add函数在/sys/devices/system/cpu这个节点下建立了一个cpufreq节点,该节点的下面以后会用来放置当前governor的一些配置参数。参数cpu_subsys是内核的一个全局变量,是由更早期的初始化时初始化的,代码在drivers/base/cpu.c中:
- struct bus_type cpu_subsys = {
- .name = "cpu",
- .dev_name = "cpu",
- };
- EXPORT_SYMBOL_GPL(cpu_subsys);
- void __init cpu_dev_init(void)
- {
- if (subsys_system_register(&cpu_subsys, cpu_root_attr_groups))
- panic("Failed to register CPU subsystem");
- cpu_dev_register_generic();
- }
这样看来,cpufreq子系统的初始化其实没有做什么重要的事情,只是初始化了几个per_cpu变量和建立了一个cpufreq文件节点。下图是初始化过程的序列图:
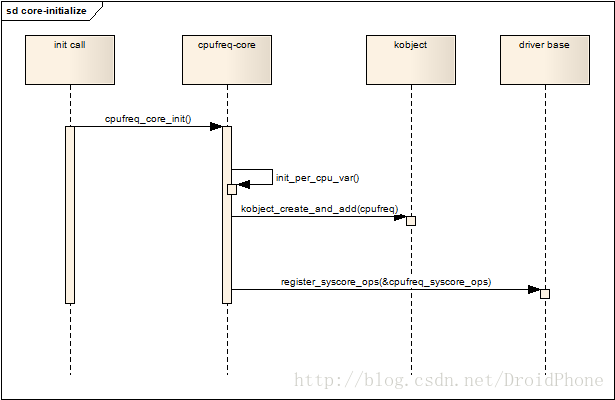
图 1.1 核心层初始化
2. 注册cpufreq_governor
系统中可以同时存在多个governor策略,一个policy通过cpufreq_policy结构中的governor指针和某个governor相关联。要想一个governor被policy使用,首先要把该governor注册到cpufreq的核心中,我们可以通过核心层提供的API来完成注册:
- int cpufreq_register_governor(struct cpufreq_governor *governor)
- {
- int err;
- ......
- governor->initialized = 0;
- err = -EBUSY;
- if (__find_governor(governor->name) == NULL) {
- err = 0;
- list_add(&governor->governor_list, &cpufreq_governor_list);
- }
- ......
- return err;
- }
3. 注册一个cpufreq_driver驱动
与governor不同,系统中只会存在一个cpufreq_driver驱动,根据上一篇Linux动态频率调节系统CPUFreq之一:概述的介绍,cpufreq_driver是平台相关的,负责最终实施频率的调整动作,而选择工作频率的策略是由governor完成的。所以,系统中只需要注册一个cpufreq_driver即可,它只负责知道如何控制该平台的时钟系统,从而设定由governor确定的工作频率。注册cpufreq_driver驱动会触发cpufreq核心的一系列额外的初始化动作,第一节所说的核心初始化工作非常简单,实际上,更多的初始化动作在注册cpufreq_driver阶段完成。核心提供了一个API:cpufreq_register_driver来完成注册工作。下面我们分析一下这个函数的工作过程:
- int cpufreq_register_driver(struct cpufreq_driver *driver_data)
- {
- ......
- if (cpufreq_disabled())
- return -ENODEV;
- if (!driver_data || !driver_data->verify || !driver_data->init ||
- ((!driver_data->setpolicy) && (!driver_data->target)))
- return -EINVAL;
- write_lock_irqsave(&cpufreq_driver_lock, flags);
- if (cpufreq_driver) {
- write_unlock_irqrestore(&cpufreq_driver_lock, flags);
- return -EBUSY;
- }
- cpufreq_driver = driver_data;
- write_unlock_irqrestore(&cpufreq_driver_lock, flags);
- ret = subsys_interface_register(&cpufreq_interface);
- ......
- ......
- register_hotcpu_notifier(&cpufreq_cpu_notifier);
- static struct subsys_interface cpufreq_interface = {
- .name = "cpufreq",
- .subsys = &cpu_subsys,
- .add_dev = cpufreq_add_dev,
- .remove_dev = cpufreq_remove_dev,
- };
driver注册完成后,驱动被保存在全局变量cpufreq_driver中,供核心层使用,同时,每个cpu也会建立自己的policy策略,governor也开始工作,实时地监控着cpu的负载并计算合适的工作频率,然后通过driver调整真正的工作频率。下图是cpufreq_driver注册过程的序列图:
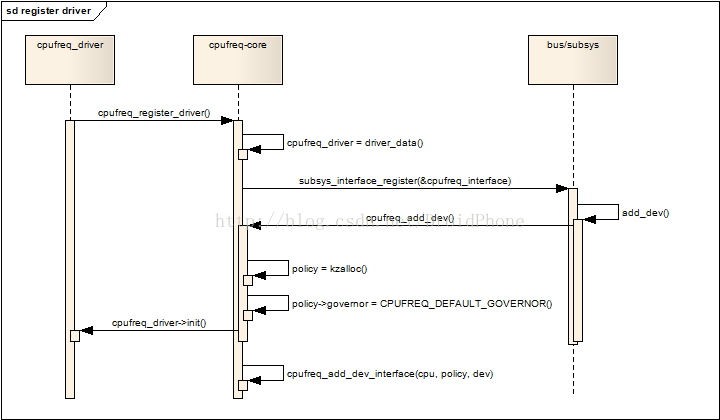
图 3.1 cpufreq_driver的注册过程
4. 为每个cpu建立频率调整策略(policy)
为每个cpu建立频率调整策略实在注册cpufreq_driver阶段的subsys_interface_registe函数中完成的,上一节已经提到,该函数最终会调用cpufreq_add_dev回调函数,现在展开这个函数分析一下:
因为subsys_interface_registe会枚举各个cpu设备,不管该cpu处于offline还是online状态,cpufreq_add_dev都会被调用,所以函数的一开始,判断如果cpu处于offline状态,直接返回。
- static int cpufreq_add_dev(struct device *dev, struct subsys_interface *sif)
- {
- ......
- if (cpu_is_offline(cpu))
- return 0;
- policy = cpufreq_cpu_get(cpu);
- if (unlikely(policy)) {
- cpufreq_cpu_put(policy);
- return 0;
- }
- for_each_online_cpu(sibling) {
- struct cpufreq_policy *cp = per_cpu(cpufreq_cpu_data, sibling);
- if (cp && cpumask_test_cpu(cpu, cp->related_cpus)) {
- read_unlock_irqrestore(&cpufreq_driver_lock, flags);
- return cpufreq_add_policy_cpu(cpu, sibling, dev);
- }
- }
- policy = kzalloc(sizeof(struct cpufreq_policy), GFP_KERNEL);
- if (!policy)
- goto nomem_out;
- if (!alloc_cpumask_var(&policy->cpus, GFP_KERNEL))
- goto err_free_policy;
- if (!zalloc_cpumask_var(&policy->related_cpus, GFP_KERNEL))
- goto err_free_cpumask;
- policy->cpu = cpu;
- policy->governor = CPUFREQ_DEFAULT_GOVERNOR;
- cpumask_copy(policy->cpus, cpumask_of(cpu));
- /* Initially set CPU itself as the policy_cpu */
- per_cpu(cpufreq_policy_cpu, cpu) = cpu;
- init_completion(&policy->kobj_unregister);
- INIT_WORK(&policy->update, handle_update);
- ret = cpufreq_driver->init(policy);
- if (ret) {
- pr_debug("initialization failed\n");
- goto err_set_policy_cpu;
- }
- 设定该cpu的最大和最小工作频率
- 设定该policy的最大和最小工作频率
- 设定该policy可供调节的频率档位
- 设定cpu调节频率时的延迟时间特性
- 该policy可以管理的cpu个数(policy->cpus)
- /* related cpus should atleast have policy->cpus */
- cpumask_or(policy->related_cpus, policy->related_cpus, policy->cpus);
- cpumask_and(policy->cpus, policy->cpus, cpu_online_mask);
- blocking_notifier_call_chain(&cpufreq_policy_notifier_list,
- CPUFREQ_START, policy);
如果是hot-plug加入的cpu,找出它上次使用的governor:
- #ifdef CONFIG_HOTPLUG_CPU
- gov = __find_governor(per_cpu(cpufreq_cpu_governor, cpu));
- if (gov) {
- policy->governor = gov;
- pr_debug("Restoring governor %s for cpu %d\n",
- policy->governor->name, cpu);
- }
- #endif
最后,建立cpu设备下的sysfs文件节点:cpufreq,它的完整路径是:/sys/devices/system/cpu/cpux/cpufreq,同时,在他的下面,相应的sysfs节点也同时被建立,节点的内容请参考本系列的第一篇文章: Linux动态频率调节系统CPUFreq之一:概述:
- ret = cpufreq_add_dev_interface(cpu, policy, dev);
- static int cpufreq_add_dev_interface(unsigned int cpu,
- struct cpufreq_policy *policy,
- struct device *dev)
- {
- ......
- /* prepare interface data */
- ret = kobject_init_and_add(&policy->kobj, &ktype_cpufreq,
- &dev->kobj, "cpufreq");
- ......
- /* set up files for this cpu device */
- drv_attr = cpufreq_driver->attr;
- while ((drv_attr) && (*drv_attr)) {
- ret = sysfs_create_file(&policy->kobj, &((*drv_attr)->attr));
- if (ret)
- goto err_out_kobj_put;
- drv_attr++;
- }
- for_each_cpu(j, policy->cpus) {
- per_cpu(cpufreq_cpu_data, j) = policy;
- per_cpu(cpufreq_policy_cpu, j) = policy->cpu;
- }
- ret = cpufreq_add_dev_symlink(cpu, policy);
- memcpy(&new_policy, policy, sizeof(struct cpufreq_policy));
- /* assure that the starting sequence is run in __cpufreq_set_policy */
- policy->governor = NULL;
- /* set default policy */
- ret = __cpufreq_set_policy(policy, &new_policy);
- policy->user_policy.policy = policy->policy;
- policy->user_policy.governor = policy->governor;
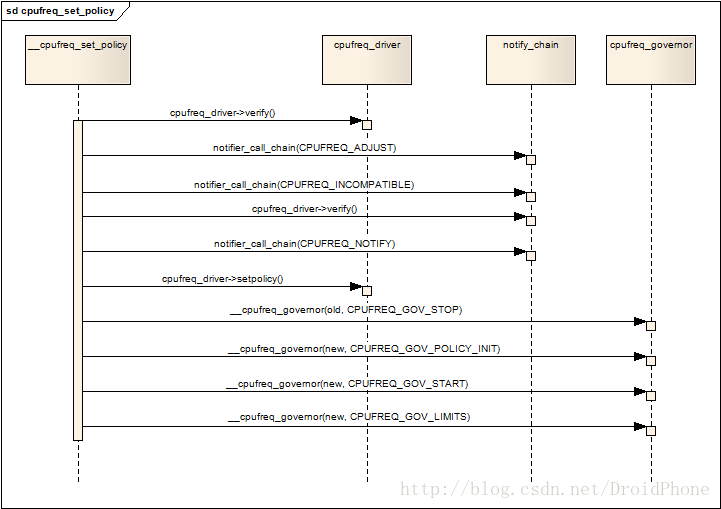
图 4.1 设置一个cpufreq_policy
5. 其它API
cpufreq的核心层除了提供上面几节讨论的注册governor,注册cpufreq_driver等API外,还提供了其他一些辅助的API,以方便其它模块的使用。
- int cpufreq_register_notifier(struct notifier_block *nb, unsigned int list);
- int cpufreq_unregister_notifier(struct notifier_block *nb, unsigned int list);
- CPUFREQ_TRANSITION_NOTIFIER 收到频率变更通知
- CPUFREQ_POLICY_NOTIFIER 收到policy更新通知
- int cpufreq_driver_target(struct cpufreq_policy *policy,
unsigned int target_freq,
unsigned int relation);
- int __cpufreq_driver_target(struct cpufreq_policy *policy,
unsigned int target_freq,
unsigned int relation);
- void cpufreq_verify_within_limits(struct cpufreq_policy *policy, unsigned int min, unsigned int max);
- int cpufreq_update_policy(unsigned int cpu);















 617
617

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









