






本人学生党跟着江科大初学stm32,发现网上stm32矩阵键盘大多教程代码使用了寄存器0X00F什么的看不懂,学习了两天才写出成功运行的代码。因此想分享自己的代码和疑惑。欢迎大家讨论解答。
一 先上原理图
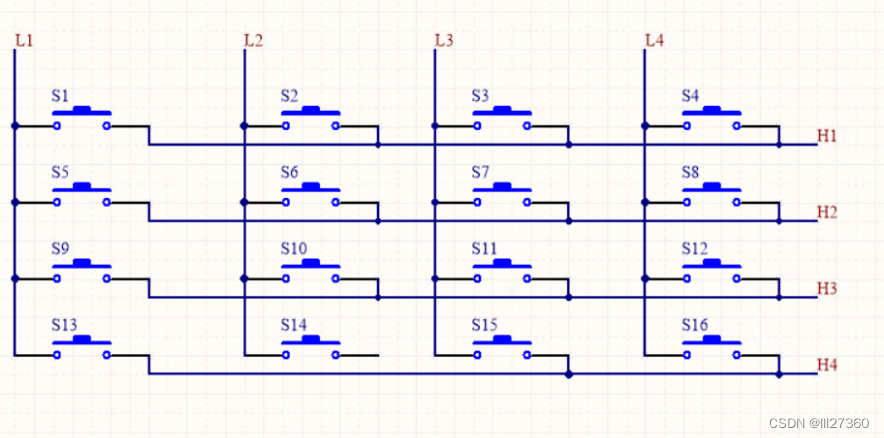 矩阵键盘按键的两端分别引出串联到了四行四列八个引脚上(后文简称“行引脚”“列引脚”),当按下按键时相应的行引脚与列引脚相连。
矩阵键盘按键的两端分别引出串联到了四行四列八个引脚上(后文简称“行引脚”“列引脚”),当按下按键时相应的行引脚与列引脚相连。
二 设计思路
(1)扫描法
通过给四行对应引脚配置下拉输入(使引脚保持低电平),四列对应引脚配置输出高电平。用while循环检测是否有行引脚电平发生变化。若发生变化进入相应行的if语句,并使行引脚输出高电平,列引脚下拉输入,检测那一列引脚发生电平变化。找出相应的行,列就可以确定按键位置赋值了(改变引脚输出输入模式的速度很快,不用担心断开)
直接上代码
4*4key.c:
#include "stm32f10x.h"
#include"Delay.h"
#include"key_44 .h"
extern uint16 t flag,keynum;
void key_init1(void)//通过行输入 列输出 确定相应按键在哪一行
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_Initstucture;
GPIO_Initstucture.GPIO_Mode = GPIO_Mode_IPD;//将行所对应引脚配置下拉输入 (默认低由平)
GPIO_Initstucture.GPIO_Pin =key_hang;//采用宏定义引脚方便后续更改引脚(可在头文件中查看)
GPIO_Initstucture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_Initstucture);
GPIO_Initstucture.GPIO_Mode = GPIO_Mode_Out_PP;//将列所对应引脚配置推换输出GPIO
GPIO_Initstucture.GPIO_Pin = key1| key2| key3| key4;//同样采用宏定义引脚方便后续更改引脚
GPIO_Initstucture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_Initstucture);
GPIO_SetBits(GPIOB,key1| key2| key3| key4);//输出高电平
}
void key_init2(void)//通过列输入 行输出 确定相应按键在那一列
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
GPIO_InitTypeDef GPIO_Initstucture;
GPIO_Initstucture.GPIO_Mode = GPIO_Mode_IPD;//将列所对应引脚配置下拉输入 (默认低电平)
GPIO_Initstucture.GPIO_Pin = key1| key2| key3| key4;
GPIO_Initstucture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_Initstucture);
GPIO_Initstucture.GPIO_Mode = GPIO_Mode_Out_PP;//
GPIO_Initstucture.GPIO_Pin = key_hang;//同上宏定义
GPIO_Initstucture.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_Initstucture);
GPIO_SetBits(GPIOB,key_hang);
}
void key_scan(void)
{
key_init1();//行输入 列输出查找哪一行电平发生变化
if(h1_input==1||h2_input==1||h3_input==1||h4_input==1)//如果任意一行电平变化
{
Delay_ms(10);//消抖
if(h1_input==1)//第一行电平变化
{
key_init2();//改变行列输出输入模式
Delay_ms(5);
if(key1_input==1)//第一列
{
flag=1;
keynum=1;
}
else if(key2_input==1)
{
flag=1;
keynum=2;
}
else if(key3_input==1)
{
flag=1;
keynum=3;
}
else if(key4_input==1)
{
flag=1;
keynum=4;
}
}
else if(h2_input==1)
{
key_init2();
Delay_ms(5);
if(key1_input==1)
{
flag=1;
keynum=5;
}
else if(key2_input==1)
{
flag=1;
keynum=6;
}
else if(key3_input==1)
{
flag=1;
keynum=7;
}
else if(key4_input==1)
{
flag=1;
keynum=8;
}
}
else if(h3_input==1)
{
key_init2();
Delay_ms(5);
if(key1_input==1)
{
flag=1;
keynum=9;
}
else if(key2_input==1)
{
flag=1;
keynum=10;
}
else if(key3_input==1)
{
flag=1;
keynum=11;
}
else if(key4_input==1)
{
flag=1;
keynum=12;
}
}
else if(h4_input==1)
{
key_init2();
Delay_ms(5);
if(key1_input==1)
{
flag=1;
keynum=13;
}
else if(key2_input==1)
{
flag=1;
keynum=14;
}
else if(key3_input==1)
{
flag=1;
keynum=15;
}
else if(key4_input==1)
{
flag=1;
keynum=16;
}
}
}
}
4*4key.h:
#ifndef key__h
#define key__h
#include "stm32f10x.h" // Device header
#define key_hang GPIO_Pin_11|GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14//宏定义行引脚
#define key1 GPIO_Pin_10//宏定义列引脚
#define key2 GPIO_Pin_2
#define key3 GPIO_Pin_1
#define key4 GPIO_Pin_0
#define h1_input GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_11)//宏定义读取行引脚电平
#define h2_input GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_12)
#define h3_input GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_13)
#define h4_input GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_14)
#define key1_input GPIO_ReadInputDataBit(GPIOB,key1)//宏定义读取列引脚电平
#define key2_input GPIO_ReadInputDataBit(GPIOB,key2)
#define key3_input GPIO_ReadInputDataBit(GPIOB,key3)
#define key4_input GPIO_ReadInputDataBit(GPIOB,key4)
void key_init1(void);
void key_init2(void);
void key_scan(void);
#endif
main.c:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "key_44.h"
#include "OLED.h"
#include "led.h"
uint16_t flag=0,keynum=0;
int main(void)
{ OLED_Init();//OLED屏幕的初始化(可以不用看)
OLED_ShowString(1,1,"keynumer:");
while(1)//通过while循环扫描是否有按键按下
{
key_scan();//扫描函数
if(flag == 1)//通过标志位确定是否有按键按下避免重复刷新OLED屏
{
flag=0; //记得随手关门哦
OLED_ShowNum(1,10,keynum,2);
}
}
}
(2)中断检测法(瞎起的)
这个方法改了好多次还是失败,不知道为什么发出来希望能够得到解惑。
原理,给行引脚配置推挽输出高电平、下降沿触发,列引脚配置下拉输入。当按键按下时高电平产生下降趋势触发中断从而确定那一列,同时中断函数中通过检测那一列引脚电平变高从而确定在那一列,由此确定行列位置。(但是不知为什么在中断函数中检测不到列引脚变高导致无法驱动)
sensor.c:
void countsensor_init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_Out_PP;//推挽输出
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11 | GPIO_Pin_12| GPIO_Pin_13| GPIO_Pin_14 ;//行引脚
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_11 | GPIO_Pin_12| GPIO_Pin_13| GPIO_Pin_14);//置高电平
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;//下拉输入
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_2| GPIO_Pin_1| GPIO_Pin_0;//列引脚
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource11);//配置中断通道
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource12);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource13);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource14);
EXTI_InitTypeDef EXTI_InitStructure;
EXTI_InitStructure.EXTI_Line=EXTI_Line11|EXTI_Line12|EXTI_Line13|EXTI_Line14;
EXTI_InitStructure.EXTI_LineCmd=ENABLE;
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Falling;//下降沿触发
EXTI_Init(&EXTI_InitStructure);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_InitStructure.NVIC_IRQChannel=EXTI15_10_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_InitStructure);
}
void EXTI15_10_IRQHandler(void)//中断函数(15到10公用一个中断函数但都有各自的通道)
{
if(EXTI_GetITStatus(EXTI_Line11)==SET)//如果第一行中断通道打开
{
Delay_ms(10);//消抖
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10)==1)//读取那一列引脚电平变高
{
flag =1;
keynum = 1;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_2)==1)
{led11_on();
flag =1;
keynum = 2;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)==1)
{
flag =1;
keynum = 3;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0)==1)
{
flag =1;
keynum = 4;
}
else
{flag=0;}
EXTI_ClearITPendingBit(EXTI_Line11);//清除中断标志位防止重复中断
}
else if(EXTI_GetITStatus(EXTI_Line12)==SET)
{
Delay_ms(10);
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10)==1)
{
flag =1;
keynum = 5;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_2)==1)
{
flag =1;
keynum = 6;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)==1)
{
flag =1;
keynum = 7;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0)==1)
{
flag =1;
keynum = 8;
}
else
flag=0;
EXTI_ClearITPendingBit(EXTI_Line12);
}
else if(EXTI_GetITStatus(EXTI_Line13)==SET)
{
Delay_ms(10);
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10)==1)
{
flag =1;
keynum = 9;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_2)==1)
{
flag =1;
keynum = 10;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)==1)
{
flag =1;
keynum = 11;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0)==1)
{
flag =1;
keynum = 12;
}
else
flag=0;
EXTI_ClearITPendingBit(EXTI_Line13);
}
else if(EXTI_GetITStatus(EXTI_Line14)==SET)
{
Delay_ms(10);
if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_10)==1)
{
flag =1;
keynum = 13;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_2)==1)
{
flag =1;
keynum = 14;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_1)==1)
{
flag =1;
keynum = 15;
}
else if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_0)==1)
{
flag =1;
keynum = 16;
}
else
flag=0;
EXTI_ClearITPendingBit(EXTI_Line14);
}
}
sensor.h:
#ifndef countsensor_h
#define countsensor_h
void countsensor_init(void);
#endif
望解惑!!!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









