







面向对象界的主要使用的一种建模语言。
一、UML定义
二、类图
- 一个类是“一种”另一个类:is-a关系;
- 两个类之间存在关联:
- 一个类“包含”另一个类:has-a关系:被包含者是包含者的一部分(组合composition);有一个集合,集合中的东西独立存在(聚集aggregation)
- 一个类“使用”另一个类:use-a关系
- 一个类“创建”另一个类
类名
类的 UML 表示是一个长方形,垂直地分为三个区,如图 1 所示。类名,类的数据成员,类的方法(函数)。顶部区域显示类的名字。中间的区域列出类的属性。底部的区域列出类的操作。
当在一个类图上画一个类元素时,你必须要有顶端的区域,下面的二个区域是可选择的(当图描述仅仅用于显示分类器间关系的高层细节时,下面的两个区域是不必要的)。图 1 显示一个航线班机如何作为 UML 类建模。正如我们所能见到的,名字是 Flight,我们可以在中间区域看到Flight类的3个属性:flightNumber,departureTime 和 flightDuration。在底部区域中我们可以看到Flight类有两个操作:delayFlight 和 getArrivalTime。

图 1: Flight类的类图
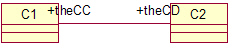
双向关联:
C1-C2:指双方都知道对方的存在,都可以调用对方的公共属性和方法。
在GOF的设计模式书上是这样描述的:虽然在分析阶段这种关系是适用的,但我们觉得它对于描述设计模式内的类关系来说显得太抽象了,因为在设计阶段关联关系必须被映射为对象引用或指针。对象引用本身就是有向的,更适合表达我们所讨论的那种关系。所以这种关系在设计的时候比较少用到,关联一般都是有向的。
使用ROSE 生成的代码是这样的:
 class C1
class C1

 ...{
...{
 public:
C2* theC2;
public:
C2* theC2;
 };
class C2
...{
public:
C1* theC1;
};
};
class C2
...{
public:
C1* theC1;
};
双向关联在代码的表现为双方都拥有对方的一个指针,当然也可以是引用或者是值。
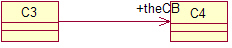
单向关联:
C3->C4:表示相识关系,指C3知道C4,C3可以调用C4的公共属性和方法。没有生命期的依赖。一般是表示为一种引用。
生成代码如下:
class C3
...{
public:
C4* theC4;
};
class C4
...{
};
单向关联的代码就表现为C3有C4的指针,而C4对C3一无所知。
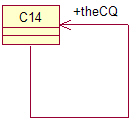
自身关联(反身关联):
自己引用自己,带着一个自己的引用。
代码如下:
class C14
...{
public:
C14* theC14;
};
就是在自己的内部有着一个自身的引用。
2、聚合/组合
当类之间有整体-部分关系的时候,我们就可以使用组合或者聚合。
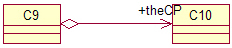
聚合:表示C9聚合C10,但是C10可以离开C9而独立存在(独立存在的意思是在某个应用的问题域中这个类的存在有意义。这句话怎么解,请看下面组合里的解释)。
代码如下:
class C9
...{
public:
C10 theC10;
};
class C10
...{
};
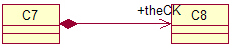
组合(也有人称为包容):一般是实心菱形加实线箭头表示,如上图所示,表示的是C8被C7包容,而且C8不能离开C7而独立存在。但这是视问题域而定的,例如在关心汽车的领域里,轮胎是一定要组合在汽车类中的,因为它离开了汽车就没有意义了。但是在卖轮胎的店铺业务里,就算轮胎离开了汽车,它也是有意义的,这就可以用聚合了。在《敏捷开发》中还说到,A组合B,则A需要知道B的生存周期,即可能A负责生成或者释放B,或者A通过某种途径知道B的生成和释放。
他们的代码如下:
class C7
...{
public:
C8 theC8;
};
class C8
...{
};
可以看到,代码和聚合是一样的。具体如何区别,可能就只能用语义来区分了。
3、依赖

依赖:
指C5可能要用到C6的一些方法,也可以这样说,要完成C5里的所有功能,一定要有C6的方法协助才行。C5依赖于C6的定义,一般是在C5类的头文件中包含了C6的头文件。ROSE对依赖关系不产生属性。
注意,要避免双向依赖。一般来说,不应该存在双向依赖。
ROSE生成的代码如下:
// C5.h
#include "C6.h"
class C5
...{
};
// C6.h
#include "C5.h"
class C6
...{
};
虽然ROSE不生成属性,但在形式上一般是A中的某个方法把B的对象作为参数使用(假设A依赖于B)。如下:
#include "B.h"
class A
...{
void Func(B &b);
}
那依赖和聚合\组合、关联等有什么不同呢?
关联是类之间的一种关系,例如老师教学生,老公和老婆,水壶装水等就是一种关系。这种关系是非常明显的,在问题领域中通过分析直接就能得出。
依赖是一种弱关联,只要一个类用到另一个类,但是和另一个类的关系不是太明显的时候(可以说是“uses”了那个类),就可以把这种关系看成是依赖,依赖也可说是一种偶然的关系,而不是必然的关系,就是“我在某个方法中偶然用到了它,但在现实中我和它并没多大关系”。例如我和锤子,我和锤子本来是没关系的,但在有一次要钉钉子的时候,我用到了它,这就是一种依赖,依赖锤子完成钉钉子这件事情。
组合是一种整体-部分的关系,在问题域中这种关系很明显,直接分析就可以得出的。例如轮胎是车的一部分,树叶是树的一部分,手脚是身体的一部分这种的关系,非常明显的整体-部分关系。
上述的几种关系(关联、聚合/组合、依赖)在代码中可能以指针、引用、值等的方式在另一个类中出现,不拘于形式,但在逻辑上他们就有以上的区别。
这里还要说明一下,所谓的这些关系只是在某个问题域才有效,离开了这个问题域,可能这些关系就不成立了,例如可能在某个问题域中,我是一个木匠,需要拿着锤子去干活,可能整个问题的描述就是我拿着锤子怎么钉桌子,钉椅子,钉柜子;既然整个问题就是描述这个,我和锤子就不仅是偶然的依赖关系了,我和锤子的关系变得非常的紧密,可能就上升为组合关系(让我突然想起武侠小说的剑不离身,剑亡人亡...)。这个例子可能有点荒谬,但也是为了说明一个道理,就是关系和类一样,它们都是在一个问题领域中才成立的,离开了这个问题域,他们可能就不复存在了。
4、泛化(继承)
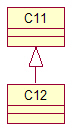
泛化关系:如果两个类存在泛化的关系时就使用,例如父和子,动物和老虎,植物和花等。
ROSE生成的代码很简单,如下:
#include "C11.h"
class C12 : public C11
...{
};
5、这里顺便提一下模板

上面的图对应的代码如下:
template<int>
class C13
...{
};
这里再说一下重复度,其实看完了上面的描述之后,我们应该清楚了各个关系间的关系以及具体对应到代码是怎么样的,所谓的重复度,也只不过是上面的扩展,例如A和B有着“1对多”的重复度,那在A中就有一个列表,保存着B对象的N个引用,就是这样而已。
•多重性(重数):用来说明关联的两个类之间的数量关系。重数写在被包含端。
类图表示类之间的静态关系。
三、交互图
•一次交互就是指在特定语境中,为了实现某一个目标,而在一组对象之间进行交换的一组消息所表示的行为

消息
UML中的4种交互图
•顺序图:顺序图是一种强调消息时间顺序的交互图,为读者提供了控制流随着时间推移的清晰的可视化轨迹
•通信图:UML 2.0中的通信图实际上就是UML 1中的协作图,它强调的是参加交互的对象的组织,为读者提供了在协作对象结构组织 的语境中观察控制流的一个清晰的可视化轨迹
•定时图:采用了一种带数字刻度的时间轴来精确地描述消息的顺序
•交互 概述图:是交互图和活动图的混合物
•如何阅读交互图
阅 读顺序图

顺序图的主要元素
•对象与角色:最顶上一排矩形框。在交互图中,参与交互的对象既可以是具体的事物,又可以是原型化的事物。作为具体的事物,一个对象代表现实世界中的某个东 西。例如,aOrder作为类Order的一个实例,可以代表一个特定的订单;而如果作为一个原型化的事件,则aOrder可以代表类Order的任何一 个实例。类名前有分号:。分号前表示实例化的对象。shape1:Square表示从Square类实例化的shapeq1对象。
•生命线与控制焦点:每个对象都有自己的生命线,对象生命线是一条垂直的虚线,用来表示一个对象在一段时间内存在。

•消息:用来描述对象之间所进行的通信的,该 信息带有对将要发生的活动的期望。当传送一个消息时,它所引起的动作是用一个通过对计算过程的抽象而得到的可执行语句(就是方法头)。
• 消息分为五种:调用、返回、发送、创建和销毁
•调用:表示调用某个对象一个操作

•顺序编号(第几步的编号):整个消息的传递 过程就形成了一个完整的序列,因此通过在每个消息的前面加上一个用冒号隔开的顺序号来表示其顺序。除了顺序编号之外, 还可以采用嵌套方案:
读图小结
•第1步 在dispatchForm(分发窗体)中,对于某个已支付的Order进行分发时,就会调用该订单(一个Order类的实例对象aOrder)的 dispatch()方法
•1.1 dispatch()方法将逐个调用 [for each orderitem] 该Order对应的所有OrderItem对象的getPeddleryId()方法获取供应商ID 1.2(PeddleryId),1.1.1 而OrderItem对象则是通过其所对应的Product对象来的getPeddleryId()方法来获取供应商ID 1.1.2
• 当Order的实例对象aOrder得到返回的PeddleryId后,根据该值判断是否已经有相对应的DeliverOrder对象【if PeddeleryId Not Exist】,如果没有就创建它(调用 1.3 create(PeddleryId)),然后再将对应的Product添加到这个DeliverOrder对象中。[else ] 1.4否则就直接添加到相应的DeliverOrder对象中

嵌套,由左向右,由上向 下

•循环与分支

交互片 断操作符
片段就是指上面的框,
左上角是片段操作符
assert(断言)
一定会发生
•交互片断操作符assert是用来表示内容所描述的行为是执行过程中那 个时刻唯一的有效行为。如果执行到这个片断的前面,则说明该片断就一定会发生。它通常和ignore或 consider一起使用,以断言某种特定种类的消息行为

break
条件复合跳出
•交互片断操作符break和循环语句的break有点类似,通常break用来定义一个含有监护条件的子片断。
如果监护条件为“真”则执行子片断,而且不执行包含子片断的图中其它交互将不会执行,也就是跳出去;
如果监护条件为“假”,那 么执行将正常地继续进行

critical
连续性的事物性的操作
•表示该子片断是“临界区域”,在临界区域中生命线上的事件序列不能够和其它区域中的任何其他事件交 错。通常用来表示一个原子性的连续操作,例如事务性操作

par
同时执行
•用来表示“并行”的,也就是用来表示两个或多个并发执行的子片断,并行子片断中单个元素的执行次序可以以任何可能的顺序相互操作

ref
引用另一个片 段到此处
•在一个交互图中,我们可以引用其它的交互图,其表示的方法是用一个矩形,加上ref操作符,并写明引用的 交互图名称即可

| 图 | 表示法 | 图 | 表示法 |
| 类图 | class | 对象图 | object |
| 包图 | package | 用例图 | use case |
| 顺序图 | sd | 通信图 | comm |
| 定时图 | timing | 活动图 | activity |
| 交互概观图 | intover | 状态机图 | statemachine |
| 构件图 | component | 部署图 | deployment |

















 807
807

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









