







Lyapunov 方法是控制理论中用于判断系统稳定性的一种重要工具。它通过构造一个标量函数(Lyapunov 函数),结合系统的动态行为,分析系统的稳定性。以下是具体原理、判断条件和简单例子:
Lyapunov 方法的基本原理
-
Lyapunov 函数定义:
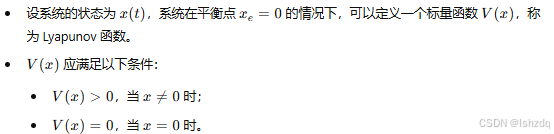
-
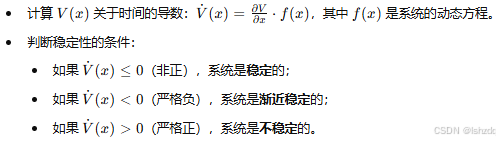
Lyapunov 函数导数条件:
简单例子:一维非线性系统
系统模型:
![]()
分析该系统在平衡点 x=0x = 0 处的稳定性。
构造 Lyapunov 函数:
选择![]() ,这是一个常见的能量形式。
,这是一个常见的能量形式。
检查条件:
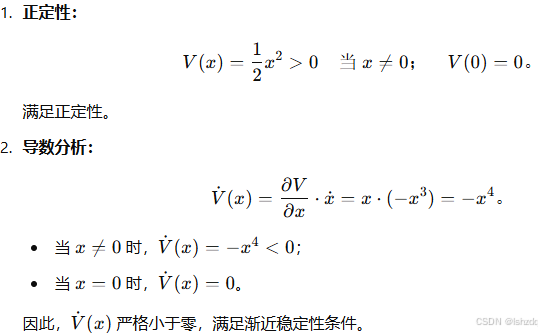
结论:
系统在平衡点 x = 0 是渐近稳定的。
Lyapunov 方法的实际应用
Lyapunov 方法广泛用于非线性控制系统分析和设计。常见的应用包括:
- 自动控制系统稳定性分析:如 PID 控制器设计中稳定性验证。
- 非线性系统的自适应控制:通过构造 Lyapunov 函数设计控制律。
- 机器人和无人机动力学:分析轨迹跟踪系统的稳定性。
通过 Lyapunov 方法,工程师可以在没有精确解的情况下判断系统的稳定性,这对于复杂的非线性系统特别重要。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









